Wikinger 2 Orbiter – Wikipedia
Der Viking 2 Orbiter , in den siebziger Jahren des 20. Jahrhunderts als Teil der Viking 2 -Sonde (bestehend aus einem Orbiter und einem Lander) ins Leben gerufen und am 7. August 1976 in den Umlauf Geschichte der Erforschung des Mars. Der Orbiter war mit Avant -Gart -Werkzeugen ausgestattet und hat zusätzlich zum Senden von einzigartigen Bildern der Marsoberfläche auf den Boden eine große Anzahl wissenschaftlicher Experimente durchgeführt. [Erste]
Der Orbiter, der auf dem Modell des Mariner 9 -Vorläufers basiert, hatte die Form eines Octagons aus der Erweiterung von etwa 2,5 Metern. Die acht Wände messen eine Höhe von 0,4572 Metern und abwechselnd 1.397 und 0,508 Meter breit. Die Gesamthöhe des Orbiters betrug 3,29 Meter von der Verbindung mit dem Lander bis zum unteren Ende bis zum mit dem Pitcher am oberen Ende. Vier Flügel von Sonnenkollektoren erstreckten sich senkrecht zueinander mit einer Gesamtflügelöffnung (von einem Ende der beiden gegenüberliegenden Flügel) von 9,75 Metern. Jeder Flügel bestand aus zwei Sonnenkollektoren von 1,57 × 1,23 Metern für insgesamt 34800 Solarzellen, die in der Lage sind, bis zu 620 W in der Nähe des Mars zu produzieren. Überschüssige Energie wurde in zwei Nickel-Cadmium-Batterien mit 30 Ampère-Stunde gelagert. [2]
Der Antrieb wurde durch einen doppelten Propellermotor (Monomethylidrazin und Diazoto -Tetroxid) sichergestellt, der bis zu 9 Grad geneigt werden konnte und einen maximalen PUSH -Wert von 1.323 N liefert. Die Kontrolle der Raumorientierung wurde durch das Vorhandensein von zwölf Mindermotoren ermöglicht. Die Stabilisierung wurde durch einen Sonnenschutz -Akquisitionssensor, einen Kreuzfahrtsensor der Sonne, einen Sternzeiger mit Canopo und sechs Gyroskopen sowie zwei Beschleunigungsmesser gewährleistet. Die Kommunikation fand über einen 20 -W -Bandsender (2,3 GHz) und zwei 20 WTA Twin statt, um zusätzliche Experimente im Zusammenhang mit Telekommunikation zu ermöglichen. Ein Sender wurde auch im X -Band (8,4 GHz) installiert. An einem Ende der Orbiter -Basis wurde eine Parabolantenne mit hoher Verstärkung an zwei Achsen verbunden, während der obere Teil ein fester Anker mit niedrigem Einzustand verankert wurde. Die maximale Datenmenge, die durch die Sonde bis zur Übertragung am Boden archiviert werden können, betrug 1.280 Megabit. Die Temperatur wurde dank Schutzschichten, thermisch aktivierten Schlitzen und elektrischen Heizungen unter Kontrolle gehalten. [2]
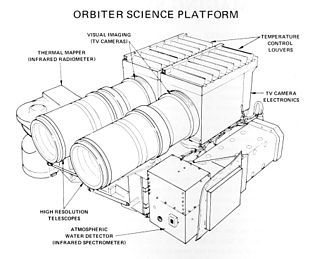
Die wissenschaftliche Instrumentierung des Orbiter aus der Gesamtmasse von etwa 72 kg, zielte im Wesentlichen darauf ab, den Marsboden und die Messung des Wasserdampfs in der Atmosphäre und den Emissionen im Bereich der Hölle zu messen; Die Werkzeuge wurden auf eine isolierte und einstellbare isolierte Plattform platziert, die sich von der Basis des Orbiters erstreckte. Zusätzliche Experimente im Zusammenhang mit der Verwendung von Funkwellen konnten über den Sender auf dem Board durchgeführt werden. Die auf -Board -Funktionen wurden von zwei unabhängigen Prozessoren durch den Speicher von jeweils 4.096 Wörtern reguliert, um die empfangenen Kontrollen und die erfassten Daten zu speichern.
Nach einer interplanetären Reise von 333 Tagen trat die Sonde am 7. August 1976 erfolgreich in die Marsumlaufbahn ein. Die Umlaufbahn wurde in den folgenden zwei Tagen reguliert, und die ersten Bilder kamen bis zum 9. August vor Ort. Basierend auf den Bildern, die der Orbiter und die von Viking 1 erhalten haben, die ab dem 19. Juni um den roten Planeten umkreisten, wählte das NASA Control Center den am besten geeigneten Ort für die Landung des Landers. Die Wahl fiel auf eine Ebene von etwa 200 km westlich meines Kraters, genannt Utopia Planitia, etwa 6.000 km vom Landeplatz des Viking -Landers 1. Die Abteilung von der Sonde und die daraus resultierende Landung des Landers werden am 3. September Juli stattgefunden desselben Jahres. [3]
Die Hauptaufgabe des Orbiter endete am 8. November 1976, als sie sich der Oppositionsphase des Mars näherte (wenn die Interposition der Sonne zwischen Mars und Erde unmöglich macht des Sonnensystems jede Kommunikation zwischen den beiden Planeten). Die Kommunikation mit der Sonde wurde am 14. Dezember desselben Jahres wieder aufgenommen und begann die zweite Phase der Mission von Viking 2; Im Oktober 1977 wurden Deimos von Deimos hergestellt, und im selben Monat, nachdem ein schrittweise Abstammung vor Monaten begann, wurde der Periastro der Umlaufbahn auf die Mindestquote von 300 km reduziert, um eine bessere Kartierung der Marsoberfläche zu ermöglichen. Zahlreiche geringfügige Orbitaländerungen sind befolgt, um die Kartierung zu erleichtern, indem die Bewegungsrate der Oberfläche im Vergleich zum Orbiter zwischen zwei aufeinanderfolgenden Schwungrädern variiert wird. [4]
Am 25. Juli 1978 wurde der Orbiter von Viking 2 in eine besonders elliptische Umlaufbahn gelegt, deren Quote zwischen 302 und 33.176 km liegt, um zu vermeiden, dass der Grund des Mars nach einem möglichen Einfluss kontaminiert wird. Die Umlaufbahn bleibt mindestens bis 2019 stabil. Die Sondenoperationen wurden am selben Tag nach 706 Umlaufbahnen rund um den Planeten und nach dem Versenden von fast 16.000 Bildern der Marsoberfläche abgeschlossen. Obwohl die Mission des Orbiter von Viking 2 als Erfolg zu betrachten ist, dauerte er fast die Hälfte des Orbiter von Viking 1, der am 7. August 1980 nach 1.485 Umlaufbahnen starb. Dies war auf einen Verlust des Treibsystems des Wikinger 2 -Orbiter -Systems zurückzuführen, das den für die Umlaufanpassungen erforderlichen Gastank lange vor dem Fälligkeit entladen hatte. [2]

Oberflächenzuordnung [ ändern | Modifica Wikitesto ]
Der Viking 2 -Orbiter, ähnlich wie der Orbiter von Viking 1, war mit zwei hohen Auflösungs- und niedrigen Scan -Geschwindigkeitskameras ausgestattet, die auf der Werkzeugplattform montiert waren, von der Masse von jeweils 40 kg und mit der Größe von 21,8 × 21,8 × 94, 0 cm.
Die Kameras waren mit mechanischen Zwerchfäden ausgestattet, ein 1st 475 -mm -fokaler Teleskop und ein Vidicon mit einem Durchmesser von 37 mm. Sechs Farbfilter wurden auf ein Schwenkrad zwischen der Linse und dem Zwerchfell platziert: ein blauer Filter (0,35-0,53 Mikromes), ein blauer Filter (0,48-0,70), ein violettes Filter (0, 0, 35-0,47), a Grünfilter (0,50-0,60), ein roter Filter (0,55-0,70) und ein transparenter Filter. Das Betrachtungslager der Räume machte 1,54 × 1,69 Grad, wobei jedes Pixel 25 Mikroradiante entspricht. Aus einer Höhe von 1.500 km auf der Oberfläche war es möglich, wobei die Werkzeuge verfügbar waren, um einen Bereich zu kartieren, der ungefähr 40 × 44 km entspricht. Die leichte Divergenz zwischen den beiden Räumen ermöglichte es, den zentralen Teil des Teils des mit beiden Werkzeuge beobachteten Gebiets abzudecken. Die Belichtungszeit hatte eine Variable von 0,003 bis 2,66 Sekunden. Die einzelnen Pixel wurden in Form einer 7 -Bit -Nummer (von 0 bis 127) digitalisiert und durch den Speicher des Boards der Sonde gespeichert, die auf die Übertragung auf dem Boden wartet. Die beiden Kameras waren völlig identisch und unabhängig voneinander, auch in Bezug auf Ernährung.
Die vier wesentlichen Funktionen von Viking Visual Imaging Subsystem ( Str ), bestehend aus den beiden Kameras, wie folgt:
- Die Auswahl eines geeigneten Landes für Lander , die Sicherheit und wissenschaftliches Interesse kombinierten;
- Die Beobachtung der wichtigsten geologischen Formationen, die an den ausgewählten Landeplätzen vorhanden sind, mit den vom Lander aufgezeichneten Bildern verglichen werden;
- Kartierung des Planeten für nachfolgende geologische Studien;
- Das Studium der Marsatmosphäre.
Jedem von den Wikinger -Orbiter erfassten Bild wurde einen alphanumerischen Code von fünf digiten und einen Buchstaben zugewiesen, der aus der Anzahl der Revolution (erste drei Ziffern), dem Identifikationsschreiben des Wikinger (A oder B) und einer progressiven Anzahl von zwei Ziffern bestand . Die Verwendung von Kameras endete am 25. Juli 1978.
Andere Experimente [ ändern | Modifica Wikitesto ]
Orbitalparameter [ ändern | Modifica Wikitesto ]
Ein Prospekt der Orbitalparameter des Orbiter folgt. [5] [6]
| Art der Umlaufbahn | Center | Start Ende | Periastro | Entfernung | Zeitraum | Neigung | Exzentrizität |
|---|---|---|---|---|---|---|---|
| Oreozentrische Umlaufbahn | Marte | Ab dem 8. August 1976 | 1,496 km | 35,800 km | 27,32 Erz | 55,2 ° | 0,7777 |
| Oreozentrische Umlaufbahn | Marte | Vom 26. August 1976 | 1,486 km | – – | 24,62 Erz | 55,4 ° | 0 |
| Oreozentrische Umlaufbahn | Marte | Vom 29. September 1976 | 1,515 km | – – | 24,78 Erz | 75,1 ° | 0 |
| Oreozentrische Umlaufbahn | Marte | Ab dem 19. Dezember 1976 | 775 km | – – | 26,48 Erz | 80,1 ° | 0 |
| Oreozentrische Umlaufbahn | Marte | Ab dem 1. März 1977 | 748 km | – – | 24,73 Erz | 80,2 ° | 0 |
| Oreozentrische Umlaufbahn | Marte | Ab dem 17. April 1977 | 720 km | – – | 24,73 Erz | 80,5 ° | 0 |
| Oreozentrische Umlaufbahn | Marte | Vom 22. Oktober 1977 bis 24. Juli 1978 |
300 km | – – | 24 Erz | 0 ° | 0 |
| Oreozentrische Umlaufbahn | Marte | Ab dem 23. Juli 1980 | 302 km | 33,176 km | 24,08 Erz | 0 ° | 0,8163 |
Die Bilder der Marsoberfläche, die von den Orbitern der beiden Wikinger auf die Erde gesendet wurden, haben die vorherigen Hypothesen über die Existenz von Wasser auf dem Mars vollständig revolutioniert. In vielen Bereichen des Planeten wurden riesige Täler, die von Flüssen gegraben wurden, gefunden, die zeigten, wie große Wasserströme gebrochene Dämme hatten, Rillen im Felsen verursachten und für Tausende von Kilometern reisten. Große Gebiete mit einer dichten Anwesenheit von Kanälen in der südlichen Hemisphäre des Planeten deuten darauf hin, dass es in abgelegenen Zeiten auf dem Mars regnete. [7] [8] Viele Auswirkungen von Kratern scheinen durch einen Körper verursacht worden zu sein, der Schlammboden beeinflusst hat. Vielleicht hat sich der umgebende gefrorene Boden zum Zeitpunkt ihrer Formation aufgelöst, indem sich sich selbst in Schlamm verwandelt und Wellen erzeugt, wie sie auf der Oberfläche um einige Marskrater zu sehen sind. [9] In einigen Regionen, die als “marzianische chaotische Böden” bezeichnet werden und von riesigen Kanälen geandet wurden, scheinen ein sehr schneller Verlust großer Wasservolumina mit einem geschätzten Bereich in etwa zehntausendmal so schnell wie dem Mississippi -Fluss erfahren zu haben. Es wird angenommen, dass dies auf eine unterirdische vulkanische Aktivität zurückzuführen ist, die zur Auflösung einer großen Menge Eis hätte führen können, die, wenn sie an den flüssigen Zustand überging, durch Zusammenbruch des Bodens wegflossen ist. [zehn] [11]
Bildergalerie [ ändern | Modifica Wikitesto ]
Die folgenden Bilder, von denen einige Mosaiken kleinerer Bilder sind, zeigen einige der besten hochauflösenden Fotos, die uns von den Wikinger -Orbiters gesendet werden.
-

Die großen Kanäle, die vom Wikinger beobachtet wurden, legten darauf hin, dass einst auf dem Mars riesige Flüssigkeitsströme lagen. Das Bild ist Teil der Karte namens Moon Palus -Shirt.
-

Drop -Shaped -Inseln, die durch Wasserflüsse in den Maja -Valles modelliert wurden, beobachtet vom Orbiter Viking. Die Inseln wurden in dem von der Kraterliste, Bok und Gold ausgestoßenen Material gebildet. Das Bild ist Teil der Karte namens Oxia Palus -Shirt.
-

Um Erosion wie das zu verursachen, wie der Wikinger in den von dem handgefertigten Krater ausgestoßenen Materialien gezeigt wurde, wurden riesige Wasserströme benötigt. Das Bild ist Teil der Karte namens Moon Palus -Shirt.
-

Das vom Arandas -Krater ausgestoßene Material scheint schlammig gewesen zu sein. Anstatt von oben hineinzufallen, scheint das Material die kleinen älteren rauen Krater umgegangen zu sein. Krater wie diese deuten auf das Vorhandensein großer Eisvolumina hin, die sie zum Zeitpunkt des Aufpralls geschmolzen haben. Das Bild ist Teil der Karte namens Sea Shirt Acidalium.
-

Dieses Bild einer Seite des ausgestorbenen Vulkans Alba Mons zeigt mehrere Kanäle. Einige von ihnen wurden Lavaströmen zugeschrieben, während andere wahrscheinlich durch den Wasserfluss ausgegraben wurden. Das Bild ist Teil der Karte, die als Arcadia -Shirt bezeichnet wird.
-

Netzwerke von Kanälen, wie z.
-

Im Bild nannte die Formation Ravi Vallis. Diese Struktur wurde wahrscheinlich gebildet, als gigantische Wasserströme aus dem Boden rechts (einem chaotischen Boden) aus dem Boden kam. Das Bild ist Teil der Karte, die Margaritifer Sinus Arcadia genannt wird.
-

Deimos auf einem 1977 aufgenommenen Foto.
- ^ G. A. Sffenen, Das Viking -Projekt , In J. Geophys. Res. , vol. 82, n. 28, 30. September 1977, S. 3959-3970. URL wurde am 13. September 2017 konsultiert .
- ^ A B C Viking 2 Orbiter . Sind nssdc.gsfc.nasa.gov , NASA. URL wurde am 13. September 2017 konsultiert .
- ^ H. Sursky E N. L. Crabil, Viking Landing Sites: Auswahl und Zertifizierung , In Wissenschaft , N. 193, 27. August 1976, S. 809-812. URL wurde am 13. September 2017 konsultiert .
- ^ C. W. Snyder, Die Missionen der Wikinger -Orbiter , In J. Geophys. Res. , vol. 82, n. 28, 30. September 1977, S. 3971-3983. URL wurde am 13. September 2017 konsultiert .
- ^ Viking 2 Orbiter – Trajektoriendetails . Sind nssdc.gsfc.nasa.gov , NASA. URL wurde am 13. September 2017 konsultiert .
- ^ R. H. Tolson et al. Anwesend Orbit- und Positionsbestimmung für Mars Orbiter und Landerer [ unterbrochene Verbindung ] , In J. Spacecr. Raketen , vol. 7, n. 9, 2. September 1970, S. 1095-1100. URL wurde am 13. September 2017 konsultiert .
- ^ P. Raeburn, Aufdeckung der Geheimnisse des Roten Planeten Mars , National Geographic Societ, 1998.
- ^ P. Moore et al. Anwesend Der Atlas des Sonnensystems , Mitchell Beazley Publishers, 1990.
- ^ Hugh H. Kieffer, Mars , University of Arizona Press, 1992, ISBN 978-0-8165-1257-7. URL wurde am 14. September 2017 konsultiert .
- ^ O. Morton, Mars Mapping , Picador, 2002.
- ^ G. A. Sffenen, Wissenschaftliche Ergebnisse der Wikingermission , In Wissenschaft , vol. 194, n. 4271, 2. Dezember 1976, S. 1274-1276. URL wurde am 13. September 2017 konsultiert .
Recent Comments