Projection de bande – Wikipedia
Le Projection de patrouille , parfois aussi comme Scanne de lumière Et rarement comme Topométrie légère Décrit, comprend des méthodes de mesure optiques dans lesquelles les séquences d’image sont utilisées pour l’enregistrement à trois dimensions des surfaces. En plus du balayage laser, il s’agit d’une procédure de balayage 3D qui permet à la forme de surface des objets d’être numérisée sans contact et de présenter trois dimensions. En principe, de telles procédures fonctionnent de telle manière qu’un projecteur est projeté avec un projecteur (par exemple des rayures) sur l’objet à mesurer, et est inclus par (au moins) une caméra. Si vous connaissez l’emplacement mutuel du projecteur et de la caméra, vous pouvez créer les points indiqués dans l’appareil photo – représenté le long d’une bande avec l’orientation connue de la bande à partir du projecteur et calculer leur position à trois dimensions (voir Fig. 1). [d’abord]
Les méthodes de projection de patrouille diffèrent dans le fait qu’elles travaillent avec une lumière projetée ou codée différemment, et dans la façon dont les différents modèles de projection sont identifiés dans les images.
Messprinzip [ Modifier | Modifier le texte source ]]

Le principe de mesure est modélisé sur la vision spatiale humaine, avec un objet à trois dimensions considéré par deux yeux qui ont une distance les uns des autres (voir la vision stéréoscopique). Le projecteur remplace l’un des deux yeux en projetant un faisceau lumineux sur l’objet de mesure, ce qui illumine un point de surface.
Configuration d’un scanner d’éclairage à bande [ Modifier | Modifier le texte source ]]
Dans la mise en œuvre technique, il y a un Scanner d’éclairage , qui travaille avec le principe de la projection de patrouille, à partir d’au moins un échantillon de projecteur qui ressemble essentiellement à un projecteur de diapositives, ainsi qu’au moins une caméra vidéo numérique montée sur un trépied. Dans les systèmes commerciaux, les structures se sont maintenant établies avec un projecteur et une ou deux caméras.
Processus de mesure [ Modifier | Modifier le texte source ]]
Le projecteur éclaire l’objet de mesure dans le temps avec des motifs de rayures claires parallèles et sombres de différentes largeurs (voir Fig. 3). La ou les caméras enregistrent le modèle de patrouille projeté pour la projection d’un point de vue connu. Une photo est prise avec chaque appareil photo pour chaque motif de projection. Pour chaque pixel de toutes les caméras, cela crée une séquence temporelle de différentes valeurs de luminosité.
Calcul des coordonnées de surface [ Modifier | Modifier le texte source ]]
Avant le calcul réel, le numéro de patrouille correct dans l’image de la caméra doit être identifié afin de pouvoir l’attribuer à une position d’image.
Le projecteur et la caméra forment la base d’un triangle, et le faisceau lumineux projeté du projecteur et le rythme rejeté de la caméra forment les côtés du triangle (voir Fig. 1). Si vous connaissez la longueur de base et les angles entre les rayons de lumière et la base, vous pouvez déterminer l’emplacement de l’intersection au moyen d’un calcul triangulaire, qui est appelé méthodes de triangulation. Le calcul exact des rayons a lieu avec le processus d’équilibre du bundle connu à partir de la photogrammétrie.
Toutes les procédures ultérieures sont basées sur ce principe.
Processus de coupe légère [ Modifier | Modifier le texte source ]]

Pendant le processus de coupe de lumière, un pack de niveau est projeté sur l’objet à mesurer (voir Fig. 2). Ce paquet de lumière crée une ligne lumineuse sur l’objet. Cette ligne est exactement directement à partir de la direction du projecteur. Du côté de la caméra vidéo, vous pouvez les voir déformés par la géométrie de l’objet en raison de la distorsion en perspective. L’écart par rapport à la rectitude de l’image de la caméra est une mesure de la hauteur de l’objet.
La procédure est souvent élargie en projetant de nombreuses lignes parallèles, c’est-à-dire une calandre de ligne sur l’objet de mesure en même temps. Le numéro de patrouille correct se trouve ensuite dans l’image en comptant et en identifiant la ligne de grille correspondante.
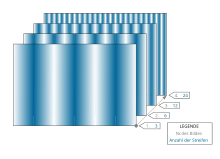
L’incessant dans la surface de l’objet entraîne des problèmes avec une affectation claire. Afin d’éviter toute échec, une approche hiérarchique est utilisée (voir Fig. 3). En d’autres termes, vous prenez plusieurs enregistrements et variant le motif de bande, chacun avec un nombre différent de bandes. Vous commencez avec un faible nombre de bandes “rugueuses” et augmentez le nombre de bandes pour chaque image, ce qui rend les rayures de plus en plus fins. [d’abord]
Approche de lumière codée [ Modifier | Modifier le texte source ]]

La dissolution des ambiguïtés est particulièrement problématique pour les surfaces incohérentes. À l’aide de l’approche de lumière codée, vous pouvez dissoudre les ambiguïtés et donc avoir une méthode absolument de mesure. [d’abord] Il existe différents motifs de lumière codés qui sont utilisés.
Une possibilité est très similaire à la stratégie brute-fin mentionnée ci-dessus. La différence est qu’au lieu d’épisodes de Dark Light-Dark continues en forme de sinus, un épisode codé binaire avec des bords durs est utilisé. Ces modèles de code d’éclairage projetés dans une ligne sont enregistrés par une caméra synchronisée. En conséquence, chaque position dans le motif de lumière projeté contient un épisode de code binaire clair, qui peut ensuite être attribué dans les images d’une position d’image correspondante. En d’autres termes, si vous regardez un seul élément d’image dans la caméra, cet élément d’image “voit” une séquence claire-clarte-dark, qui peut clairement être attribuée à la ligne de projection qui illuminé l’élément de surface via un tableau.
Les autres codes lumineux sont z. B. Modèle aléatoire (stochastique) (voir Fig. 4). L’attribution du modèle de projection pour la position d’image correcte est effectuée en sélectionnant une petite section dans le modèle de projection et en comparant l’image ( correspondance d’images ). Dans le domaine de la vision par ordinateur et de la photogrammétrie, il s’agit d’une procédure importante et connue comme un problème de correspondance et le sujet d’une recherche intensive. Étant donné que l’emplacement mutuel du projecteur et de la caméra est connu, la géométrie épipolaire peut être bénéfique – pour réduire l’espace de recherche. Cela évite l’échec (en grande partie) et l’affectation est considérablement accélérée.
Procédure de diapositive de phase [ Modifier | Modifier le texte source ]]
Une précision plus élevée est avec la procédure de diapositive de phase (également Projection de bande dynamique ou décalage de phase nommé). La calandre à bande projetée est comprise comme une fonction en forme de sinus. Dans le cas de petites élévations, un bord de clarte léger dans l’image de la caméra ne se déplace que par les fractures d’une période de grille (voir Fig. 2). Comme déjà mentionné dans la section du processus de coupe de lumière, une ligne projetée sur l’objet est déformé par la géométrie de l’objet. L’écart par rapport à cette ligne dans l’image de la caméra est une mesure de la hauteur de l’objet.
Si la calandre de projection a une modulation de luminosité en forme de sinus, un élément d’image dans la caméra signale un changement en forme de sinus. Si vous déplacez la calandre de projection dans le projecteur d’un quart, l’élément d’image publiera désormais une dépendance en forme de cosinus sur la hauteur de l’objet. Le quotient des deux signaux correspond donc à la tangente du changement causée par le changement de hauteur. Avec une chirurgie de la table de recherche, l’Arkustangen peut être déterminé efficacement. En tant qu’angle ou des informations de phase, cela représente le décalage des fractions de la période de la grille. [d’abord]
La procédure de diapositive de phase peut être utilisée soit comme supplément d’un code gris, soit comme une procédure hétérodynique absolument mesurant.
Un scanner de projection de patrouille doit être calibré avant utilisation (voir #calibration). Les dispositifs commerciaux professionnels sont généralement déjà calibrés. Les informations de surface enregistrées sont documentées sous forme de nuages ponctuels ou de surfaces en forme libre.
étalonnage [ Modifier | Modifier le texte source ]]

Un étalonnage précis des propriétés d’imagerie est important pour calculer les coordonnées et la précision garantie des résultats. Toutes les propriétés d’imagerie des projecteurs et des caméras sont décrites à l’aide d’un modèle mathématique. Une caméra à trous simple sert de base, dans laquelle toutes les poutres d’image du point d’objet dans l’espace à trois dimensions sont représentées par un point commun, le centre de projection, la course et le pixel associé sur le capteur ou le film.
De plus, les propriétés non idéales des systèmes de lentilles réelles qui entraînent des distorsions de l’image doivent être adaptées par une correction de marquage.
Les paramètres de la caméra de trou ainsi que leur emplacement et leur orientation dans la pièce sont déterminés à partir d’une série de prises de vue d’étalonnage en utilisant des méthodes photogrammétriques, en particulier avec un calcul de compensation du bundle.
Une seule mesure avec le Scanner de projection de bande est limité dans son exhaustivité par la visibilité de la surface de l’objet. Pour qu’un point de surface soit enregistré, il doit être illuminé par le projecteur et observé par les caméras. Les points situés à l’arrière de l’objet doivent être enregistrés dans une mesure distincte.
Pour un objet complexe, de nombreuses mesures individuelles (quelques centaines) peuvent être nécessaires pour l’enregistrement complet. Les méthodes suivantes sont utilisées afin que les résultats de toutes les mesures puissent être fusionnés dans un système de coordonnées commun: les marqueurs en forme de point de fixation sur l’objet comme points de passeport, la corrélation des caractéristiques de l’objet ou la mesure exacte de la position du capteur avec un système de mesure supplémentaire. Ce processus fait partie des experts comme La navigation désigné.
précision [ Modifier | Modifier le texte source ]]
La précision de mesure accessible est proportionnelle à la troisième racine du volume de mesure. Les systèmes commerciaux utilisés dans le domaine de l’ingénierie inverse atteignent une précision de 0,003 mm à 0,3 mm en fonction de l’effort technique et du volume de mesure. Les systèmes avec des champs de mesure microscopiques inférieurs à 1 cm² peuvent être utilisés pour évaluer les microgométries, telles que. B. Les rayons sur les bords de coupe ou l’évaluation des microstructures sont utilisés et atteignent des mesures inférieures à 1 µm.

Les processus qui fonctionnent avec la lumière projetée sont généralement utilisés lorsque une précision particulièrement élevée est requise ou que la surface n’a pas de texture. En plus des applications en médecine, technologie dentaire et pathologie Scanner de projection de bande principalement utilisé dans l’industrie, dans le processus de conception des nouveaux produits (ingénierie inverse) et dans le contrôle de forme des pièces et des outils (comparaison actuelle cible). Avec plusieurs milliers de systèmes installés en Allemagne (estimés en avril 2005), vous êtes très répandu dans l’industrie automobile et des avions et êtes une alternative préférée aux dispositifs de mesure des coordonnées mécaniques dans de nombreuses applications.
Mesure de la scène du crime [ Modifier | Modifier le texte source ]]
Avec l’aide de Scanners légers Dans les boutons de caméras de surface des techniciens de criminalité, une scène de crime en trois dimensions et ainsi créer une image 3D à partir de la scène du crime, qui peut être analysée et recherché des traces sans que le groupe de scène de crime de la police n’ait à entrer sur le site et peut-être falsifié ou détruit des preuves. Une application partielle de ceci est le balayage à trois dimensions des imprimés de sol et des empreintes de pas, ce qui a l’avantage par rapport au versant plus tôt avec le plâtre que les preuves sont fixées sans contact et l’empreinte peut être reproduite le plus souvent possible.
Ingénierie inverse [ Modifier | Modifier le texte source ]]
L’exemple adjacent explique le processus d’ingénierie inverse en utilisant l’exemple d’une voiture de course historique: la flèche argentée W196, construite en 1954. Depuis l’original (1), un nuage de points (2) a été généré avec 98 millions de points de mesure en 14 heures de mesure. Ceux-ci ont été réduits à des coupes parallèles de l’axe à une distance de deux centimètres (3), sur laquelle un modèle CAO (4) a été construit en environ 80 heures de travail. Sur la base du modèle CAO, une réplique (5) a finalement été fabriquée sur une échelle de 1: 1, qui peut être visitée aujourd’hui au musée Mercedes-Benz à Stuttgart-Untertürkheim.
Documentation des plaies [ Modifier | Modifier le texte source ]]
La documentation de la plaie en utilisant Topométrie légère S’il est supérieur à toutes les procédures illustratives utilisées dans la pratique médicale médicale, car elle permet la représentation spatiale et métriquement exacte avec des couleurs réalistes de points pertinents individuels d’une blessure. Le résultat est un «homme de blessure numérique» et permet au cadavre extérieur.
Exemples d’application en archéologie, conservation des monuments et industrie [ Modifier | Modifier le texte source ]]
La liste suivante donne un aperçu des applications de cette procédure:
- Documentation de sécurité 3D sans contact et sans contact avec les actifs de l’art et de la culture [2]
- Contrôle de la qualité des composants mécaniques [3]
- Reconstruction virtuelle des objets détruits [4]
- Visibilité des inscriptions difficiles à lire [5]
- Animation du comportement factuel [6]
- Reproduction ou création de copies physiques en utilisant un processus de prototypage rapide [7]
- Fabrication de répliques du musée [8]
- G. Frankowski, M. Chen, T. Huth: Mesure de forme 3D en temps réel avec projection de rayures numériques par Texas Instruments Micromirror Devices (DMD). Dans: Proc. De Spie. Vol. 3958 (2000), S. 90–106.
- G. Frankowski, M. Chen, T. Huth: Optique Mesure des coordonnées 3D et du volume de la chambre de combustion des culasses du moteur. Dans: Proc. De “Fringe 2001”. S. 593–598.
- Fringe 2005. Le 5e atelier international sur le traitement automatique des modèles marginaux. Springer, Berlin 2006, ISBN 3-540-26037-4.
- C. Hof, H. Hopermann: Comparaison de la réplique et de la mesure in vivo de la microtopographie de la peau humaine. Université des forces armées fédérales, Hambourg.
- Klaus Körner, Ulrich Droste: Projection de rayures à faiblesan (DSFP) Université de Stuttgart.
- Christian Kohler, Klaus Körner: Strip-slipulation avec modulateurs de lumière spatiale. Université de Stuttgart.
- T. Peng, S. K. Gupta, K Lau: Algorithmes pour construire des nuages ponctuels 3D à l’aide de plusieurs modèles de projection de franges numériques. (PDF; 2,0 Mo). CAD Conf., Bangkok, Thaïlande, juin 2005.
- Elena Stoykova, Jana Harizanova, Venteslav Sainov: Profiométrie de projection de motif pour les coordonnées 3D Mesure des scènes dynamiques. Dans: Télévision tridimensionnelle. Springs, 2008, ISBN 978-3-540-72531-2.
- Procédure de mesure optique 3D des surfaces réfléchissantes: édition scientifique de kit (29 janvier 2008)
- Herbert Wichmann: Technologie de mesure 3D de la photogrammétrie-laserscanning-optique: contributions de l’Oldenburg 3d Days 2006, Version en ligne (consulté le 12 juin 2020)
- W. Wilke: Segmentation et approximation de grands nuages ponctuels. Thèse. Univ. Darmstadt, 2000. (PDF; 4,5 Mo).
- G. Wiora: Technologie de mesure optique 3D Mesure de forme précise avec un processus de projection de patrouille étendu. Thèse. Univ. Heidelberg, 2001.
- Chanson Zhang, cheminée Huang: Mesure de forme 3D à haute résolution en temps réel. Thèse de doctorat. Harvard Univ., 2005. (PDF; 8,1 Mo)
- ↑ un b c d Luhmann, Thomas: Bases, méthodes et applications de base de photogrammes à l’ordre . 3e, complètement nouveau. Et ad. Édition. Wichmann, Berlin 2010, ISBN 978-3-87907-479-2.
- ↑ Sécuriser le site du patrimoine mondial: numérisation 3D au lieu de dessiner
- ↑ Trigonart: U-Boot ingénierie inverse 3D-scan
- ↑ Communiqué de presse WS: Reconstruction virtuelle et animation de la hathorkapelle
- ↑ En ce qui concerne la gisela-grab , Message du 7 novembre 2016, consulté le 15 novembre 2016
- ↑ L.I.S.A. – Le portail scientifique de la Fondation Gerda Henkel: Scans 3D au lieu de dessiner
- ↑ 3Druck.com: Antiquité de la réplique: modèle de temple détaillé de l’imprimante 3D
- ↑ Archéologie en ligne: La nouvelle image du beau
Recent Comments