Points fixes – Wikipedia
Un Titre de point de fixation (ou un Un point fixe ) En mathématiques est un processus numérique pour l’approximation des solutions à une équation ou un système d’équation. L’équation doit d’abord être dans une équation de point fixe, c’est-à-dire dans une équation de la forme

Avec une fonction
à forme. Alors il y aura un point de départ
 à forme. Alors il y aura un point de départ
à forme. Alors il y aura un point de départ choisi et
 choisi et
choisi et calculé. Le résultat est à nouveau dans la fonction
 calculé. Le résultat est à nouveau dans la fonction
calculé. Le résultat est à nouveau dans la fonction utilisé,
et ainsi de suite. Selon des exigences supplémentaires appropriées, la conséquence obtenue approche
 et ainsi de suite. Selon des exigences supplémentaires appropriées, la conséquence obtenue approche
et ainsi de suite. Selon des exigences supplémentaires appropriées, la conséquence obtenue approche une solution de
 une solution de
une solution de Et donc une solution au problème d’origine.
Il y a une fonction
Le beaucoup
 Le beaucoup
Le beaucoup illustré en soi, ainsi qu’un élément de départ
 illustré en soi, ainsi qu’un élément de départ
illustré en soi, ainsi qu’un élément de départ . La séquence générée par le processus de point fixe associé
 . La séquence générée par le processus de point fixe associé
. La séquence générée par le processus de point fixe associé dans
 dans
dans est alors défini itérative par
- pour .


Quand la foule
Il y a un concept de convergence, on peut se demander si cet épisode contre un point fixe de
, c’est-à-dire contre un
avec
 avec
avec convergé. L’ensemble de points fixes de banache indique des conditions relativement générales dans lesquelles c’est:
 convergé. L’ensemble de points fixes de banache indique des conditions relativement générales dans lesquelles c’est:
convergé. L’ensemble de points fixes de banache indique des conditions relativement générales dans lesquelles c’est: un espace métrique complet, par exemple une partie terminée de la
Ou une salle de Banach, et
 Ou une salle de Banach, et
Ou une salle de Banach, et Une contraction, alors il y a beaucoup
Exactement un point fixe
depuis
et la séquence générée par le processus de point fixe converge
contre
.
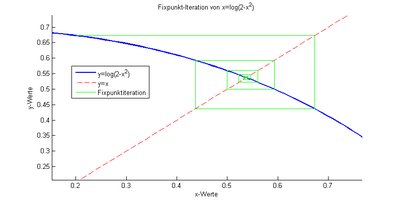
Nous recherchons la solution positive à l’équation
- .

L’équation de point fixe est obtenue par LogarithMing
- .

Par
L’intervalle, par exemple, forme la fonction d’itération donnée
 L’intervalle, par exemple, forme la fonction d’itération donnée
L’intervalle, par exemple, forme la fonction d’itération donnée en toi et est sur
![M=[0{,}2;0{,}7]](https://wikimedia.org/api/rest_v1/media/math/render/svg/928c630a1a87bab206b085e75f91e59b8abf0939) en toi et est sur
en toi et est sur Une contraction (voir illustration adjacente).
À partir de la valeur de départ
Résultats pour les prochaines étapes d’itération
 Résultats pour les prochaines étapes d’itération
Résultats pour les prochaines étapes d’itération ,
 ,
, ,
 ,
, etc. Quand environ environ 20 étapes
 etc. Quand environ environ 20 étapes
etc. Quand environ environ 20 étapes Les quatre premières décimales correspondent déjà à la solution exacte.
 Les quatre premières décimales correspondent déjà à la solution exacte.
Les quatre premières décimales correspondent déjà à la solution exacte. La procédure Heron représente également un titre de point fixe. [d’abord] Pour

le point fixe (positif)
 le point fixe (positif)
le point fixe (positif) , de sorte que
 , de sorte que
, de sorte que À la détermination numérique de
 À la détermination numérique de
À la détermination numérique de peut être utilisé.
 peut être utilisé.
peut être utilisé. Peut être
constant
Fonction de points de fixation différente avec
![fcolon [a,b]to [a,b]subset mathbb{R}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a58b2cbfd7527467302cd64b26ac670421ce8ad9) constant
constantet
 et
et pour tous
 pour tous
pour tous hors de
 hors de
hors de .
Ensuite, il y a exactement un point fixe
 .
.hors de
avec
.
 .
. Preuve [ Modifier | Modifier le texte source ]]
Vous définissez
. Alors
 . Alors
. Alors . À partir de la valeur intermédiaire, il s’ensuit qu’au moins
un zéro
 . À partir de la valeur intermédiaire, il s’ensuit qu’au moins
. À partir de la valeur intermédiaire, il s’ensuit qu’au moinsdonner avec
![x^{*}in [a,b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/653f569c55a45a11e1088a0d2209659611277c27) donner avec
donner avec . S’il y avait un deuxième point zéro, par exemple
 . S’il y avait un deuxième point zéro, par exemple
. S’il y avait un deuxième point zéro, par exemple , alors ça devrait être à cause de
 , alors ça devrait être à cause de
, alors ça devrait être à cause de Selon la phrase de Roll un point
 Selon la phrase de Roll un point
Selon la phrase de Roll un point du
intervalle
 du
dudonner
 donner
donner , était
 , était
, était Implicite en contradiction à
Hypothèse. Donc le point fixe est
 Implicite en contradiction à
Implicite en contradiction àclairement.
Exemple [ Modifier | Modifier le texte source ]]
Pour la fonction
s’applique à
 s’applique à
s’applique à :
![[-1,+1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/daa72f1a806823ec94fda7922597b19cbda684f4) :
: - .
- pour tous .




À partir de cela découle avec la phrase ci-dessus
dans
 dans
dans a exactement un point fixe
((
 a exactement un point fixe
a exactement un point fixe).
 ).
). Page de construction [ Modifier | Modifier le texte source ]]
Les méthodes de fractionnement sont un cas spécial important de points fixes. À un système linéaire d’équations

Avec un rien dans n × n -Matrice
et un vecteur
 et un vecteur
et un vecteur pour se former en une équation de points fixe,
Si vous démontez la matrice
 pour se former en une équation de points fixe,
pour se former en une équation de points fixe,Avec l’aide d’un rien inin n × n -Matrice
dans
 dans
dans - .

Alors suivez
- ,


par lequel
la matrice unitaire.
 la matrice unitaire.
la matrice unitaire. Le système linéaire des équations
est alors équivalent à la tâche de point fixe
avec
 avec
avec - .

Vous obtenez pour un vecteur de démarrage donné
la procédure d’itération suivante pour

- ,

Et le associé Iterationsmatrix Lit:
.
 .
. convergence [ Modifier | Modifier le texte source ]]
À partir du point fixe de Banach et d’autres considérations, il s’ensuit que ces méthodes de point fixe sont exactement pour chaque vecteur de démarrage
converge si le rayon spectral de la matrice d’itération
- .

devrait être aussi petit que possible, car cela détermine la vitesse de convergence.
 devrait être aussi petit que possible, car cela détermine la vitesse de convergence.
devrait être aussi petit que possible, car cela détermine la vitesse de convergence. Procédures spéciales [ Modifier | Modifier le texte source ]]
Les méthodes connues suivantes sont basées sur l’idée de construction ci-dessus pour résoudre les systèmes d’équations linéaires:
Remarques [ Modifier | Modifier le texte source ]]
Procédure d’itération du formulaire
, K = 0, 1, …
 , K = 0, 1, …
, K = 0, 1, … - linéaire , d. h. X K + 1 Linéaire ne s’accroche qu’à x k un B,
- Stationnaire , d. H. M et V sont indépendants du numéro de pas de l’itération,
- seul , d. H. Seuls les derniers vecteurs d’approximation sont utilisés.
La procédure de Newton peut être considérée comme des points fixes. En général, la convergence est assurée à l’aide de l’ensemble de points fixes de Banach, la fonction considérée doit donc être une contraction, en particulier dans la zone considérée.
- Wolfgang Dahmen, Arnold Reusken: Numerics pour les ingénieurs et les scientifiques. 2e édition. Springer-Verlag, Berlin 2008, ISBN 978-3-540-76492-2.
- Martin Hermann: Mathématiques numériques, Volume 1: Problèmes algébriques . 4e édition révisée et élargie. Walter de Gruyter Verlag, Berlin et Boston 2020. ISBN 978-3-11-065665-7.
- ↑ Transformations appropriées: zéro points et points fixes. Dans: Université de Montan Leoben. 23 février 2005, Récupéré le 27 août 2019 .
Recent Comments