Biforcazione a forcone – Wikipedia
Da Wikipedia, Liberade Libera.
In Matematica una biforcazione a forcone (O biforcazione pitchfork ) è una biforcazione locale con la particolarità di essere simmetrica. Tale simmetria è dovuta al fatto che le equazioni differenziali ordinali che rappresentano le biforcazioni sono funzioni dispari, ovvero –
F ( – X ) = F ( X ) {DisplayStyle f (-x) = f (x)}


Vi sono due tipi di biforcazioni a forcone, molto diverse tra loro: la Supercritica e la Subritica .


La forma normale della biforcazione a forcone supercritica è:
- dxdt= R X – x3{DisplayStyle {frac {mathrm {d} x} {mathrm {d} t}} = rx-x^{3}}


Studiando il campo vettoriale al variare di
R {DisplayStyle r}E vede:



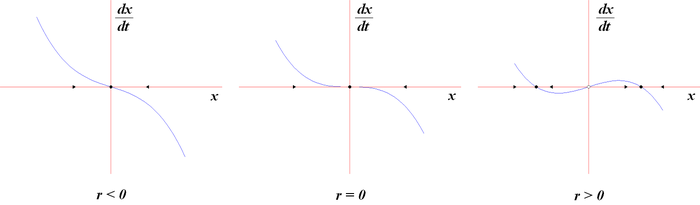
Dal diagramma di biforcazione si evince che
X = 0 {DisplayStyle x = 0}è stabile per tutti gli
R {DisplayStyle r}

negativi, mentre diventa instabile appena
R {DisplayStyle r}diventa positivo. Inoltre per
R > 0 {DisplayStyle r> 0}r{DisplayStyle {sqrt {r}}


È
– r{DisplayStyle -{sqrt {r}}

che donano al diagramma la classica forma di tridente o forcone, da cui il nome.



La forma normale della biforcazione a forcone subcritica è:
- dxdt= R X + x3{DisplayStyle {frac {mathrm {d} x} {mathrm {d} t}} = rx+x^{3}}

Lo studio del campo vettoriale mostra che:

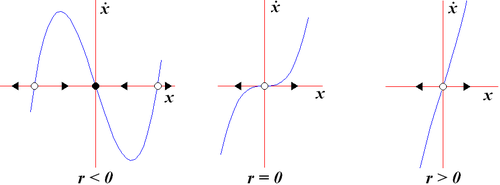
Il diagramma di biforcazione ottenuto è simmetrico a quello della supercritica, con però stavolta i due rami iperbolici instabili. Il ramo
X = 0 {DisplayStyle x = 0}invece resta stabile fino al valore
R = 0 {DisplayStyle r = 0}per poi proseguire instabile.

Biforcazione a forcone subcritica modificata [ modifica | Modifica wikitesto ”
In presenza di una biforcazione a forcone subcritica, per ogni
R > 0 {DisplayStyle r> 0}+ ∞ {DisplayStyle +Infty}
o
– ∞ {DisplayStyle -infty}

a seconda delle condizioni iniziali e, nel caso questa sia
X = 0 {DisplayStyle x = 0}
, delle perturbazioni.

Poiché biologicamente non ha senso considerare popolazioni infinite, per ovviare all’imperfezione del modello si aggiunge un termine di grado superiore. Per semplicità si sceglie il termine con arturino più basso. Questo è di quinto grado, e non di quarto, al fine di conservare la simmetria caratteristica delle biforcazioni di tipo a forcone.
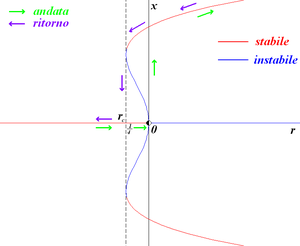
In tal caso la forma normale sarà dunque:
- dxdt= R X + x3– x5{DisplayStyle {frac {mathrm {d} x} {mathrm {d} t}} = rx+x^{3} -x^{5}} .


Mentre localmente il diagramma di biforcazione è uguale a quello della subcritica a forcone classica, all’aumentare di
X {DisplayStyle x}si assiste ad una deviazione dei rami simmetrici ad
X = 0 {DisplayStyle x = 0}

che, inoltre, diventano stabili.
Tale deviazione avviene, nella forma normale, nel valore critico di
. Per tale valore si ha, in ognuno dei due rami, una biforcazione locale del tipo nodo sella.


Sempre dal diagramma di biforcazione, inoltre, è possibile vedere un esempio di isteresi.
Infatti, facendo crescere il valore di
si nota che:
Facendo in seguito decrescere il valore di
R {DisplayStyle r}osserviamo che:
Data un’equazione differenziale
- x˙= F ( X , R ) {DisplayStyle {dot {x}} = f (x, r)}


bambino
R ∈ R {DisplayStyle Rin Mathbb {r}}, tale che:


- F ( – X , R ) = – F ( X , R ) {DisplayStyle, f (-x, r) =-f (x, r)}


ovvero
F {DisplayStyle f}sia una funzione dispari, e


- ∂f∂x(0,ro)=0,∂2f∂x2(0,ro)=0,∂3f∂x3(0,ro)≠0,∂f∂r(0,ro)=0,∂2f∂r∂x(0,ro)≠0.{DisplayStyle {Begin {array} {lll} DisplayStyle {frac {parziale f} {parziale x}} (0, r_ {o}) = 0, & DisplayStyle {frac {parziale ^{2} f} {parziale x ^{parziale x ^{2 }}} (0, r_ {o}) = 0, & DisplayStyle {frac {parziale ^{3} f} {parziale x ^{3}}} (0, r_ {o}) neq 0, \ [15pt] DisplayStyleStyleStyleStyl {frac {parziale f} {parziale r}} (0, r_ {o}) = 0, & DisplayStyle {frac {parziale ^{2} f} {parziale rpartial x}} (0, r_ {o}) neq 0. end {array}}}

![{displaystyle {begin{array}{lll}displaystyle {frac {partial f}{partial x}}(0,r_{o})=0,&displaystyle {frac {partial ^{2}f}{partial x^{2}}}(0,r_{o})=0,&displaystyle {frac {partial ^{3}f}{partial x^{3}}}(0,r_{o})neq 0,\[15pt]displaystyle {frac {partial f}{partial r}}(0,r_{o})=0,&displaystyle {frac {partial ^{2}f}{partial rpartial x}}(0,r_{o})neq 0.end{array}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5b3eff6515791234d7958b8e0516679a0d8ff158)
ovvero
F {DisplayStyle f}sia approssimabile secondo Taylor a meno del terzo ordine per
X {DisplayStyle x}e del secondo ordine per
R {DisplayStyle r}nel punto
( 0,r0) {DisplayStyle Left (0, r_ {0} a destra)}(Nelle forme normali si considera
R 0= 0 {DisplayStyle r_ {0} = 0}

).


Sotto tali ipotesi si dice che la funzione ammette una biforcazione a forcone nel punto
( 0,r0) {DisplayStyle Left (0, r_ {0} a destra)}, la quale è del tipo
-
{supercriticase∂3f∂x3(0,ro)<0,subcriticase∂3f∂x3(0,ro)>0,{displaystyle left{{begin{matrix}mathrm {supercritica} &quad mathrm {se} quad {frac {partial ^{3}f}{partial x^{3}}}(0,r_{o})<0,\ mathrm {subcritica} & quad mathrm {se} quad {frac {parziale ^{3} f} {parziale x ^{3}}} (0, r_ {o})> 0, end {matrix}} a destra. ,,}}}
-->

![{displaystyle left{{begin{matrix}mathrm {supercritica} &quad mathrm {se} quad {frac {partial ^{3}f}{partial x^{3}}}(0,r_{o})<0,\mathrm {subcritica} &quad mathrm {se} quad {frac {partial ^{3}f}{partial x^{3}}}(0,r_{o})></img>0,end{matrix}}right.,,}”></span></dd>
</dl>
<ul>
<li>Strogatz S.H. (1994), <i>Dinamica non lineare e caos </i>(Perseus Books, Cambridge) </li>
</ul>
<p> <!--Rapporto limite Newpp
Analizzato da MW2339
Tempo nella cache: 20230411215838
Scadenza della cache: 1814400
Scadenza ridotta: falso
Complicanze: [Show -Toc]
Utilizzo del tempo della CPU: 0,130 secondi
Uso in tempo reale: 0,228 secondi
Preprocessor Visitato Nodi conteggio: 1618/1000000
Post -Expand include Dimensioni: 12189/2097152 byte
Dimensioni argomenti del modello: 246/2097152 byte
Profondità di espansione più alta: 9/100
Conteggio delle funzioni del parser costoso: 1/500
Repubblica di ricorsione di unstrip: 0/20
Dimensione post -espansione di Unstrip: 3323/5000000 byte
Utilizzo del tempo LUA: 0,037/10.000 secondi
Utilizzo della memoria LUA: 1181078/52428800 byte
Numero di entità Wikibase caricate: 1/400 --><!--Transclusion expansion time report (%,ms,calls,template)
100.00% 77.890 1 -total
39.75% 30.962 1 Template:Teoria_del_caos
35.85% 27.921 1 Template:Interprogetto
35.79% 27.875 1 Template:Navbox
24.22% 18.862 1 Template:Portale
15.60% 12.153 1 Template:Icona_argomento
3.74% 2.915 34 Template:· --><!--Salvato nella cache del parser con il tasto Itwiki: pcache: idhash: 1660501-0! Canonical e Timestamp 20230411215838 e ID di revisione 131634457. Il rendering è stato attivato a causa: Visier di pagina: Page-View --></div>
<p><!--ESI <ESI: include src =](https://wikimedia.org/api/rest_v1/media/math/render/svg/afab78c7a40199b77155e2f42abaf91dbd3f49cd)

Recent Comments