Luna 25 – Wikipedia

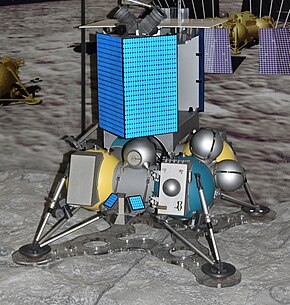
Luna 25 Modello di atterraggio
| Messa al lancio | 1 750 kg |
|---|---|
| Strumenti di massa | ~ Da 20 a 30 kg |
| Propulsione | Chimico |
| Ergol | Perossido di udmh e azoto |
| Ergols di massa | 975 kg |
| Fonte di energia | Pannelli solari e rtg |
| Orbita | Orbita di trasferimento lunare quindi orbita lunare |
|---|---|
| Localizzazione | 69,545 ° nord, 43.544 ° è |

Top 25 (in russo : Moon-25 ) o in precedenza Luna-Glob (Russo: Luna-Glob « Globe lunare ) È un atterraggio lunare russo che deve essere lanciato nel giugno 2023 e atterrare vicino al Polo Sud lunare. La missione sarà lanciata dal cosmodromo di Vostotchny, nell’Estremo Oriente russo, da un lanciatore di Soyuz 2.1B dotato di un pavimento più alto Fregat-M. Dopo il suo lancio, Luna 25 diventerà la prima sonda lunare lanciata dall’URSS/Russia dalla missione di tornare dai campioni di Luna 24, nel 1976. Diventerà anche il primo oggetto russo a atterrare su un altro corpo che sulla Terra. Dedicata a svolgere varie esperienze e dimostrazioni tecnologiche, la missione dovrebbe aprire la strada al lancio di altre missioni lunari più ambiziose, come Luna 26, 27 o 28.
Prima proposta (1997-2004) [ modificatore | Modificatore e codice ”
Luna 24, lanciata nel 1976, è l’ultima missione spaziale dell’era sovietica volta a esplorare la luna. Nonostante il tentativo interrotto di lanciare un Lunokhod finale (Mission Luna 25A), non verrà creato nessun altro progetto lunare sovietico. Dopo che l’Unione Sovietica è scoppiata nei primi anni ’90, la giovane astronautica russa ha subito la conseguente crisi economica e il crollo dei programmi spaziali a seconda del bilancio statale. Durante questo periodo di recessione, l’unica missione lunare è stata proposta nel 1997. Il progetto consiste nel posizionare usando un razzo Molniya o un Soyuz U/Fregat, quindi in sviluppo, una piccola macchina orbita intorno alla luna. Prende tre penetratori di 250 kg Tutti quelli che vengono lasciati cadere e affondano sotto la superficie lunare. Ognuno di questi dispositivi ha un sismometro e uno strumento che misura il flusso di calore. L’energia è fornita dagli isotopi nucleari. I dati forniti dai tre penetratori consentono di rilevare e individuare mediante dichiarazione trigonometrica la fonte dell’attività sismica della luna. Durante gli anni seguenti, le caratteristiche del progetto subiscono modifiche ma non gli viene assegnato alcun budget. Il progetto viene rinominato Moon Glob (« Globe lunare ) Allusione alla natura generale della rete sismometri che deve essere implementata [ Primo ” .
Offermatizzazione del progetto (2005) [ modificatore | Modificatore e codice ”
A metà degli anni 2000, l’esplorazione della luna ritorna sul fronte della scena dello spazio internazionale con lo sviluppo degli orbiti da parte della Cina (Chang’e 1 lanciato nel 2007), India (Chandrayaan-1 2008) e Giappone (Selene 2007 (Selene 2007 (Selene 2007 (Selene 2007 (Selene 2007 ). Gli Stati Uniti hanno lanciato il programma Constellation allo stesso tempo, che prevede di riportare gli uomini in superficie della luna intorno al 2020. I funzionari russi desiderano mantenere la loro presenza in un’area in cui hanno eccelso in passato. In , il manager del Vernadsky Geokhi Institute, che sta cercando di trovare fondi come parte della cooperazione internazionale, ha iniziato le discussioni con il progetto giapponese Lunar-A che sono in gran parte progrediti nello sviluppo di penetratori dotati di sismometri ma non hanno il budget necessario per Il lancio del loro veicolo spaziale. Le discussioni sono iniziate a unire progetti giapponesi e russi ma non guidano e il progetto Lunar-A è abbandonato nel 2007 [ 2 ” , [ 3 ” . Nel 2006, i funzionari dell’agenzia spaziale russa del Vernadsky Geokhi Institute e del Earth Physics Institute hanno rivelato il progetto Luna Glob.
La missione, la cui architettura è stata definita dal produttore di specie spaziali sovietiche e russe Lavotchkin, si basa su una nave madre di circa 1500 kg che avvia 10 kg di penetratori che vengono lasciati cadere sopra il mare di fertilità e forma , due cerchi distinti con diametro rispettivamente 5 e 10 km con una spaziatura di diversi chilometri tra ciascuna macchina. La nave madre deve quindi abbandonare altri due penetratori più pesanti negli Apollo 11 e 12 siti di atterraggio per ricostruire la rete di stazioni sismiche istituite nel 1969 dalla NASA. Infine, un atterraggio da 250 kg si stacca dalla nave madre per atterrare delicatamente vicino al Polo Sud. Questa stazione polare prende un sismometro e due spettrometri per rilevare la presenza di ghiaccio d’acqua. La nave madre funge da relè di comunicazione tra le 13 stazioni lunari istituite e la terra. Se il successo della missione, un rover da 700 kg deve essere lanciato intorno al 2015-2016, una missione per restituire campioni. Quest’ultimo assume i principi dell’architettura di simili missioni sovietiche degli anni ’70 mentre alleggerisce il tutto [ Primo ” , [ 2 ” .
Evoluzione delle caratteristiche della missione [ modificatore | Modificatore e codice ”


Il programma spaziale russo beneficia della ripresa economica del paese a metà degli anni 2000 e dei funzionari, dopo aver annunciato nel 2006 che Luna-Glob sarebbe stata lanciata nel 2012, avanzando la data del 2009. Le caratteristiche del progetto erano tra il tempo rivisto verso il basso. La sonda spaziale lunare ora ha una massa di 2.125 kg, include un orbiter che deve svolgere una missione scientifica di 3 anni e prende 4 penetratori. L’atterraggio non è più all’ordine del giorno. Ma lo sviluppo dei penetratori stessi è problematico. I test hanno dimostrato che questi potrebbero resistere a una velocità di percussione massima della superficie dell’oro di 1,5 km/s, è di 2,5 km/s. Sarebbe quindi necessario frenare i penetratori, ma gli ingegneri di Lavotchkin non riescono a sviluppare il sistema di frenatura basato su un razzo con un solido proporzione e i penetratori vengono rimossi dal progetto in una data prima del 2010. Un secondo progetto di missione robotica lunare , chiamato Luna-Resors, sviluppato a partire dal 2007 come parte di una collaborazione con l’India. I due progetti convergono il 2010 e si basano entrambi su un landman sviluppato da Lavotchkin. La strumentazione principale dell’atterraggio Luna-Glob (PSM) è centrata sul campione e l’analisi delle carote del suolo realizzate usando un trapano mentre Luna-Resours trasporta un rover sviluppato dall’India [ 2 ” .
Le ripercussioni del fallimento di Fobos-grunt (2011) [ modificatore | Modificatore e codice ”


All’inizio del 2010, il programma per il lancio delle due missioni rimane vaghe: le date avanzate erano nel 2012/2013 senza sapere quale missione è una priorità per l’altra. Alla fine del 2010, la data di lancio di Luna-Glob è caduta al 2014 dopo quella di Luna-Resours. La sonda spaziale Luna-Glob include un orbiter che deve richiedere 120 chilogrammi di attrezzature scientifiche. L’orbita ha una massa pianificata di 1.630 kg mentre l’atterraggio raggiunge 1.260 kg. La missione di Martienne Fobos-grunt, sviluppata da Lavotchkin e lanciata nel 2011, è un fallimento totale che evidenzia la perdita di competenze nell’industria russa nel campo dell’esplorazione dello spazio, nonché problemi organizzativi particolarmente acuti che saranno confermati dai successivi fallimenti. Di conseguenza, il lancio di Luna-Resours e Missioni lunari di Luna-Glob non sono più programmati prima del 2016-2017. Inoltre, la partecipazione indiana al progetto viene eliminata e la missione non decollerà su GSLV MK II come previsto, ma su Soyuz 2.1b. In , i manager decidono di dividere la missione Luna-Glob separando l’orbita (che vola nel 2016) e l’atterraggio pianificato per il 2017. Inoltre, si decide di rivedere completamente l’architettura dell’atterraggio, che era fino ad allora Basato su quello di Fobos-Grunt [ 4 ” .
All’inizio del 2012, a seguito del fallimento di Fobos-grunt, l’atterraggio di globo lunare è tornato alla fase di progettazione preliminare. Il computer incorporato basato su quello di Phobos-grunt viene abbandonato e il sistema di telecomunicazioni viene rivisto alla luce dei fallimenti della missione marziana. In questa data, Lunar-Glob deve trasportare una carica scientifica minima, il suo obiettivo principale è lo sviluppo delle tecniche di atterraggio morbido [ 5 ” . La precisione prevista è di 30 chilometri. Il payload, inizialmente di 30 chilogrammi, è ridotto a 17-19 kg per affrontare i problemi di sorpasso di massa vuota e include circa quindici strumenti scientifici. Il progetto prevede in quel momento di imbarcare un braccio controllato a distanza che trasporta alcuni degli strumenti e un generatore termoelettrico in radiisotopo sviluppato dal Centro di ricerca nucleare di Sarov che viene aggiunto ai pannelli solari. Luna-Glob deve precedere la missione Luna-Resours molto più sofisticata che richiederà 35 kg di strumentazione scientifica. Nel 2016, il costo dell’atterraggio di Luna-Glob è stato stimato a 2,98 miliardi di rubli [ 6 ” , [ 7 ” .
Nel 2014, i funzionari russi hanno annunciato che la missione sarà lanciata tra il 2017 e il 2019. Inizia la costruzione di un prototipo e una serie di test è prevista nel 2015. Il conflitto della Russia con l’Ucraina nel 2014 innesca un embargo di nazioni occidentali sulle consegne delle consegne delle nazioni. Componenti elettronici che richiedono la revisione delle apparecchiature elettroniche e di telecomunicazione [ 8 ” . In , Lavotchkin annuncia di aver completato la costruzione di attrezzature destinate a simulare le condizioni di un atterraggio sulla luna. Alla fine dell’anno è stata lanciata la produzione dei primi componenti del modello di volo. È anche durante questo periodo che saranno annunciati i siti di atterraggio selezionati. Il sito principale mirato è il cratere Bogouslavsky, ma Luna 25 sarà anche in grado di atterrare su un sito di riserva, il cratere di Manzini. Questa scelta è stata fatta tenendo conto di diversi fattori, come la vicinanza al Polo Sud, l’interesse scientifico dei locali, l’esposizione al sole o l’inclinazione della superficie sul sito di atterraggio, per essere inferiore a 10 ° [ 9 ” .


Nel 2017, il produttore rivela che l’atterraggio sta lottando per tenere la citazione di massa ed energia. La missione che doveva essere lanciata dal cosmodromo vostotchnyi deve ora provenire da Baikonour per salvare i costi di costruzione delle attrezzature dedicate alla preparazione della missione. Questa decisione sarà rivista e la sonda lascerà Bel-Et-Bien dal nuovo cosmodromo russo. Il calendario del progetto che ora fornisce un lancio nel 2019 è molto stretto e lo mette in concorrenza con gli sviluppi di Lavotchkin per l’atterraggio e il Rover Exomars, condotto con l’Agenzia spaziale europea. Per mantenere il preventivo di massa, i project manager decidono di rimuovere lo strumento Termo-L [ dieci ” . Nel 2018, i vari elementi della sonda sono passati alla velocità prevista, ad eccezione dello strumento chiamato BIB, l’unità di misurazione inerziale della sonda. Fornito dall’NPO IT, il pettorale ha una missione cruciale, vale a dire raccogliere tutte le informazioni necessarie in modo che il computer on -board possa guidare l’atterraggio durante il suo viaggio sulla superficie lunare. Notando che lo strumento non sarebbe pronto in tempo per un lancio nel 2019, NPO Lavotchkin proverà a sostituirlo con un equivalente europeo, chiamato Assix, costruito da Airbus. Tuttavia, questo scambio si rivelerà impossibile a causa della presenza di diversi componenti americani, fatti salvi le regole ITAR [ 11 ” . Infine, è un bius-L russo, che verrà installato. Questo ritardo causerà problemi al team svedese, responsabile della fornitura dello strumento Lina-Xsan, che si avvicina alla sua data di scadenza. Alla fine sarà deciso che lo strumento svedese non volerà su Luna 25, ma sulla missione cinese Chang’e 4. Il , Roscosmos dichiara che il lancio della sonda è pianificato il [ dodicesimo ” . Da luglio a settembre 2021, Luna 25 ha superato i test del vuoto a Peresviett, al NITS RKP [ 13 ” . Nel febbraio 2021, l’atterraggio è passato dai test vibrazionali presso RKK Energiya [ 14 ” . Nel settembre 2021, l’agenzia Tass ha annunciato che il decollo è rimandato al maggio 2022 [ 15 ” . Nel settembre 2022, il lancio è stato nuovamente riportato da un anno ed è ora programmato nel 2023. Questa modifica della data di lancio sarebbe collegata al malfunzionamento durante i test di un sensore responsabile della misurazione della velocità e dell’altitudine durante l’atterraggio sulla luna [ 16 ”


Luna 25 deve essere messo in orbita da un lanciatore di Soyuz 2.1b/Fregat-M, prelevato dal cosmodromo Vostotchnyi. Il lanciatore posizionerà la sonda, così come altri cubesat incorporati su questo volo, in bassa orbita terrestre, prima della manovra del pavimento Fregat per inviare tutto in un’orbita di trasferimento lunare dopo una breve fase di crociera. Sono possibili solo pochi finestrini di lancio, la missione che deve viaggiare con un minimo di manovre di correzione da eseguire, durante la configurazione del particolare sistema di atterraggio terrestre [ 11 ” . Il viaggio verso il nostro satellite durerà tra 4,5 e 5,5 giorni, prima che si inserisca in un’orbita lunare polare, ad un’altitudine di circa 100 chilometri. La sonda rimarrà lì per 5 giorni, durante la quale abbasserà gradualmente la sua orbita, per ridurre il suo perissance a soli 12 chilometri sul livello del mare, sopra il suo sito di atterraggio, prima di atterrare vicino al Polo Sud (sul sito principale di Bogouslavsky o Manzini sito di riserva), per un periodo iniziale di un anno [ 4 ” . La precisione con l’atterraggio pianificato è un’ellisse di 30 km su 15 e non è previsto che l’atterraggio sarà in grado di correggere la sua traiettoria stessa [ 17 ” . L’atterraggio dovrebbe toccare il terreno a una velocità tra 1.5 SM E 3 SM . Luna 25 diventerà quindi la prima missione di esplorazione dello spazio sovieto-russa lanciata sulla luna dal 1976.
Le esperienze e le comunicazioni con la Terra saranno condotte durante i giorni lunari (che durano 14,5 giorni terreni). Durante la notte lunare, un generatore termoelettrico in radiisotopo garantirà l’alimentazione della sonda, in modo che mantenga una temperatura stabile. Tutte le esperienze sono quindi disabilitate.
Il lancio della missione è previsto per il 2023 [ 18 ” .
La missione principale di Luna 25 non è lo studio scientifico della luna, ma soprattutto la dimostrazione tecnologica di un atterraggio lunare e di vari altri elementi che possono essere riutilizzati in missioni future. Pertanto, gli obiettivi puramente scientifici sono classificati come obiettivi secondari [ 4 ” . Tecnologicamente, gli obiettivi della missione sono [ 19 ” :
- La convalida della tecnica di atterraggio morbido sulla superficie lunare
- La realizzazione di vari test di comunicazione tra le regioni polari della luna e la terra
- Convalida del sistema di atterraggio per l’atterraggio
- Il test e la convalida del funzionamento del braccio controllato a distanza remoto, devono analizzare il regolite lunare
Gli obiettivi scientifici della maggioranza della missione Luna 25 sono i seguenti [ 19 ” :
- Determinare le proprietà termiche e meccaniche del regolite nelle regioni polari
- Misura le caratteristiche a infrarossi del regolite polare
- Eseguire le misurazioni della spettroscopia mediante argilla laser del regolite polare
- Determina il contenuto dell’acqua e la proporzione degli elementi chimici presenti nel terreno vicino alla superficie del regolite polare
- Determina le caratteristiche del plasma e l’esosfera neutra al polo
- Misura la presenza di polvere sul palo
- Misurare le variazioni termiche nel regolite polare


Luna 25 fa parte di un programma di esplorazione lunare il cui obiettivo finale è risolvere importanti questioni scientifiche (origine ed evoluzione della luna, caratteristiche delle regioni polari, volatili presenti, esosfera e radiazioni) e fornire gli elementi indispensabili (conoscenza del campo , risorse utilizzabili) per le future missioni con l’equipaggio. Il programma di esplorazione lunare russa, come definito nel 2016, prevede missioni robotiche di crescente complessità tenendo conto del livello di padronanza tecnica degli ingegneri russi e dei vincoli di bilancio. In definitiva, il programma deve consentire l’installazione dell’osservatorio dello spazio profondo e del sistema solare e dei laboratori scientifici. Per raggiungere questi obiettivi, sono previste le seguenti missioni robotiche (proiezione effettuata nel 2016) [ 19 ” :
- L’atterraggio Luna-Glob (Luna 25) è un veicolo spaziale leggero che deve eseguire una prima analisi del regolite lunare nelle regioni polari fino a una profondità di 50 centimetri e raccogliere dati sull’esosfera. Deve inoltre convalidare le tecniche di atterraggio e i sistemi di telecomunicazione che saranno implementati dalle seguenti missioni lunari;
- l’orbiter Risorse Luna (Luna 26) deve essere posizionato su un’orbita polare da 100 km. La sua missione è quella di mappare l’intera luna, analizzare l’esosfera e il plasma attorno alla luna, identificare i siti di atterraggio nelle regioni polari e servire da relè di telecomunicazioni per le missioni di terra. La sua data di lancio è prevista intorno al 2020;
- L’atterraggio Risorse Luna (Luna 27) è una macchina più pesante che deve atterrare anche nella regione del Polo Sud. Deve effettuare un’analisi del regolite lunare fino a una profondità di 2 metri e raccogliere dati sull’esosfera. A livello tecnologico, deve convalidare una tecnica di atterraggio ad alta precisione per evitare ostacoli a terra. Deve attuare un trapano in grado di mantenere la temperatura delle carote di terra ritirate. La sua data di lancio è prevista intorno al 2021;
- Il ritorno della missione del campione Luna innescata (Luna 28) mira a portare campioni dal terreno lunare alla terra la cui temperatura è stata conservata.
Luna 25 ha una massa di 1.750 kg tra cui 975 kg di Ergols. È diviso in due parti, la sezione inferiore, incluso il set propulsivo, il braccio manipolativo e alcune antenne, e la sezione superiore, raggruppandosi su sistemi incorporati ed esperienze scientifiche [ 17 ” .
L’atterraggio ha un sistema di telecamere pilota-D, fornito dall’Agenzia spaziale europea, che deve fornire immagini in tempo reale durante l’atterraggio. Ma gli europei hanno annunciato il 13 aprile 2022 il loro ritiro dalle missioni spaziali russe a seguito dell’invasione dell’Ucraina da parte della Russia nel 2022 [ 20 ” .
Sezione inferiore [ modificatore | Modificatore e codice ”
Approdo [ modificatore | Modificatore e codice ”
L’atterraggio ha quattro piedi, costituiti da un ammortizzatore, una forma di spazio a forma di V e una struttura di supporto principale. Questi piedi hanno piccoli sensori, tagliando automaticamente la propulsione della sonda quando quest’ultimo tocca il pavimento lunare. Gli ammortizzatori sono in grado di raccogliere uno shock di 750 kg e possono ritrarsi su 914 mm . Una volta a terra, la massa di Luna 25 guida naturalmente gli ammortizzatori di 260 mm [ 21 ” .
Propulsione [ modificatore | Modificatore e codice ”
Luna 25 è dotato di vari motori Ergols liquidi, utilizzati durante le diverse fasi della missione:
- Un motore dedicato alle correzioni della traiettoria e all’inserimento nell’orbita lunare, una spinta di 4.7 kn , fornito con carburante da un turbopomico
- Due motori dedicati all’atterraggio, ciascuno con una spinta di 588 N , alimentato dalla pressurizzazione dei carri armati
- Diversi motori di stabilizzazione e orientamento, composti da DMT1-8 (spinta di 5,8 N ) e DMT9-12 (spinta di 49 N ), fornito con carburante mediante pressurizzazione dei carri armati. Questi piccoli motori possono anche essere utilizzati al posto del motore principale per le correzioni di velocità di seguito 15 SM .
Sezione superiore [ modificatore | Modificatore e codice ”
Regolazione termica [ modificatore | Modificatore e codice ”


La regolazione termica della sonda inizia mentre è ancora al cosmodromo vostotchnyi, diverse settimane prima del suo decollo, durante l’installazione del generatore termoelettrico in radiisotopo (RTG) su Luna 25. Questo sistema di regolamentazione è composto da due parti distinte :::
- Da un lato, l’RTG della sonda, progettato per fornire tutti i sistemi della macchina grazie all’energia termica prodotta dalla disintegrazione di elementi radioattivi. Può funzionare oltre ai pannelli solari o essere l’unica fonte di energia durante le notti lunari. Durante quest’ultimo, la sua missione principale è quella di garantire l’alimentazione all’orologio on -board, che consente di svegliare la sonda e i suoi strumenti dopo l’inizio del giorno lunare. Questo RTG ha una potenza elettrica di 6,5 IN , una tensione di 3 IN e potenza termica che va da 125 IN a 145 IN .
- D’altra parte, due radiatori termici, responsabili dell’evacuazione efficace del calore prodotto dai vari dispositivi a bordo, usando tappi di alluminio riempiti di propilene, che coprono un’area totale di 0,7 M 2 Per ogni pannello. Questi tappi sono organizzati in nidi a nido d’ape, facilitando l’evacuazione del calore nello spazio vuoto [ 21 ” .
Sistemi/strumenti incorporati [ modificatore | Modificatore e codice ”
Luna 25 è dotato di un computer centrale, chiamato BIVK-R, responsabile del processo decisionale e dell’esecuzione del programma di volo. È anche colui che è responsabile della gestione dei risultati delle esperienze o persino alla diagnostica dei sistemi di atterraggio [ 21 ” . Diversi strumenti e sistemi sono direttamente collegati ad esso:
- Un adattatore di comunicazione, che consente il controllo delle antenne per la comunicazione con la terra
- Target di due stelle, consentendo di garantire il buon orientamento della sonda durante il suo viaggio
- Un sistema di regolamentazione push, responsabile dell’adattamento della spinta dei diversi set propulsivi
- Un orologio a bordo, davanti a coordinati tutte le azioni condotte dalla sonda e svegliano i sistemi di quest’ultimo dopo la notte lunare
- Due collezionisti solari, che operano a 347 K
- Un sensore Doppler, responsabile della misurazione delle velocità e delle distanze della sonda rispetto al pavimento lunare
- Due sensori inerziali, responsabili della stabilizzazione e dell’orientamento Luna 25 nelle diverse fasi della sua missione
Alimentazione elettrica [ modificatore | Modificatore e codice ”
Luna 25 è la prima sonda spaziale a provare un aumento delle latitudini lunare così elevate. L’angolo massimo del sole sopra l’orizzonte è solo di 16,3 °, sapendo che l’atterraggio può atterrare fino a 10 ° sul lato, che potrebbe limitare o aumentarne l’esposizione. Se viene utilizzato il sito commerciale di emergenza (cratere Manzani), il sole sarà superiore a 13 °. I pannelli solari della macchina sono stati quindi dimensionati di conseguenza, coloro che forniscono la maggior parte dell’elettricità della sonda. Il sistema elettrico della sonda inizia a funzionare immediatamente dopo la separazione del pavimento Fregat. È costituito da pannelli fotovoltaici, una batteria agli ioni di litio, un’unità responsabile della gestione della distribuzione di energia e un computer RTG. [ 21 ” .
Questa batteria agli ioni di litio, chiamata 8LI-70, è in realtà composta da otto batterie Ligp-70 collegate in serie, tutte davanti a poter fornire 529 IN Potenza durante condizioni di orientamento solare ottimali. Queste batterie si prendono cura di una corrente di 10 UN e scaricare in 25 UN . L’elettricità di quest’ultima è fornita da cinque pannelli fotovoltaici alogeni arsenici, con una superficie totale di 4,515 M 2 . Quattro pannelli si trovano nella sezione superiore, attorno alla piattaforma contenente le varie attrezzature di Luna 25. Un quinto pannello viene distribuito in orizzontale dopo l’atterraggio, situato sul lato dei serbatoi di carburante della sonda, nella sezione inferiore [ 21 ” .
Sistemi di comunicazione [ modificatore | Modificatore e codice ”
La comunicazione con l’atterraggio è garantita tramite antenne in X Radio Strip. Consentono in particolare ricezione, decodifica e trasmissione di controlli terrestri al computer on -board, l’esecuzione di varie misure con stazioni a SOL, ricezione di informazioni telemetriche dagli strumenti e sensori per ritrasmarli alle stazioni SOL. Luna 25 ha due ricevute a fascia bassa, due antenne di emissione a fascio basso e un’antenna di emissione regolabile, nonché tre interruttori. Il tutto garantisce la comunicazione con la sonda a un intervallo tra 200 km e 420.000 km . Luna 25 emette in due spiagge di frequenza, vale a dire 7.145–7.235 MHz e 8.400–8.500 MHz , con una velocità di 4 megabit/secondo [ 21 ” .
L’elenco degli strumenti scientifici che devono equipaggiare la sonda è stato cambiato molte volte prima di essere stabilito in modo definitivo nel 2016. Tuttavia, da quella data sono avvenuti due importanti cambiamenti, vale a dire la cancellazione di due strumenti. Termo-L è stato trasferito da Luna 25 a Luna 27 nel 2017, a causa della sua massa troppo grande per detenere i margini della missione. Allo stesso modo, il rivelatore degli ioni svedesi Luna-Xsan è stato trasferito nella missione Chang’e 4, che è atterrato sul lato nascosto della luna nel 2019, a causa dell’imminente scadenza di alcuni componenti, rendendo la sua compatibilità con Luna 25, molte volte ritardato, impossibile.
Uno dei principali elementi di questa missione è il braccio manipolativo LMK, responsabile dell’assunzione di campioni di regolite, le dimensioni delle particelle possono salire a 2,8 mm . LMK dovrà prelevare almeno 30 campioni durante il suo periodo operativo, un volume di 2 cm 3 ogni. Il raggio massimo del braccio manipolativo è di 1,5 metri.
| Strumento | Descrizione | Quantità | Fornitore | Nota |
|---|---|---|---|---|
| Adron-LR | Analisi della composizione del regolite per neutroni e analisi gamma | 6,7 kg | Questo è corretto | Descrizione dettagliata (in russo) dello strumento |
| Aries-l | Studio del regolite, come misura del plasma e delle particelle neutre | 4,6 kg | Questo è corretto | |
| BUNA | Sistema di controllo della sonda (memoria di dati scientifici) | 2,3 kg | Questo è corretto | |
| Lazma-LR | Spettrometro di massa laser per studi stretti sui campioni lunari | 2,7 kg | Iki e Università di Berna (Svizzera) | |
| LIS-TV-RPM | Infrategamento minerale immaGeur, a distanza | 2,0 kg | Questo è corretto | Video (in russo) che spiega la sua operazione |
| LMK | Braccio manipolativo che può raccogliere campioni da terra | 5,5 kg | Questo è corretto | Consente il funzionamento di Lazma-LR e LIS-TV-RPM |
| PML | Misurazione di polvere e micro -misura | 0,9 kg | Questo è corretto | |
| STS-L | Sistema delle telecamere per fornire un panorama 3D del sito di scioglimento | 4,6 kg | Questo è corretto | |
| Retro-reflettore laser | Misurazione dei movimenti di luce della luna e distanza Terre-luna | 0,1 kg | Npo spp | |
| Lina-xsan | Misurazione di neutroni e ioni | 0,7 kg | ISP (Svezia) | Strumento annullato, rubato su Chang’e 4 |
| TERMO-L | Misurazione delle caratteristiche termofisiche del regolite | 1,2 kg | Geochi | Strumento annullato, volerà su Luna 27 |
- (In) Brian Harvey, La rinascita del programma spaziale russo – 50 anni dopo Sputnik, nuove frontiere , Pratica del corridore, , 358 P. (ISBN 978-0-387-71354-0 , leggi online ) , P. 325-36
- (In) Anatoly Zak, ‘ Progetto Luna-Glob » , SU Russiaspaceweb.com (consultato il )
- Vladimir Grishin (Roscosmos), ‘ Rapporto FSA al Consiglio di gestione CCSDS Noordijkijk, Niherlands Octobre 2009 » ,
- ‘ Luna-25 “Glob” » , SU kosmolenta.com (consultato il )
- (Ru) ‘ IKI: la Federazione Russa inizierà il lancio di stazioni automatiche sulla luna nel 2018 » , SU Ria News , 20141003T1814 (consultato il )
- (In) Anatoly Zak, ‘ Missione di sbarco Luna-Glob » , SU Russiaspaceweb.com (consultato il )
- (In) Anatoly Zak, ‘ Stato del progetto Luna-Glob nel 2013 » , SU Russiaspaceweb.com (consultato il )
- (In) Anatoly Zak, ‘ Luna-Glob affronta nuovi ritardi nel 2015 » , SU Russiaspaceweb.com (consultato il )
- ‘ Luna-25 “Glob” » , SU kosmolenta.com (consultato il )
- (In) Anatoly Zak, ‘ Luna-Glob’s Stop and Go » , SU Russiaspaceweb.com (consultato il )
- (EN-EU) ‘ La russa Luna-Glob deve affrontare questioni tecniche, politiche e balistiche » , SU Nasapaceflight.com , (consultato il )
- (Ru) ‘ Roscosmos ha chiamato le scadenze per l’atterraggio della prima stazione russa sulla luna » , SU Ria News , 20200428T1815 (consultato il )
- (Ru) ‘ Nic-Rkp.ru »
- ‘ Notizia. Test acustici della stazione automatica Luna-25 » , SU www.roscosmos.ru (consultato il )
- (In) ‘ Lancio della stazione automatica Luna-25 in Russia per la luna riprogrammata per il 2022 » , SU Tass (consultato il )
- (In) Leonard David, ‘ La Russia ritarda il lancio di Luna 25 Moon Lander al 2023 » , SU Space.com ,
- ‘ Colloquio. “Luna-25” si sta preparando per l’inizio » , SU www.roscosmos.ru (consultato il )
- (In) ‘ La prima missione lunare della Russia è stata rinviata al 2023 – Roscosmos » , SU Tass ,
- (In) Maxim Litvak, ‘ Missioni di esplorazione lunare russa » , Roscosmos,
- Dorian de Schaepmeester, ‘ Ritorno della Russia sulla luna: i dettagli della missione che sorgeranno nel 2022 » , SU www.futura-sciences.com , (consultato il ) .
- ‘ Luna-25 “Glob” » , SU kosmolenta.com (consultato il )
- (In) ‘ Payload Luna-25 (Luna-Glob Lander) » , Fino a (consultato il )
Articoli Correlati [ modificatore | Modificatore e codice ”
Link esterno [ modificatore | Modificatore e codice ”
Recent Comments