Polarne dane kontaktowe – Wikipedia
Homonimiczne artykuły patrz Pole.
. współrzędne polarne
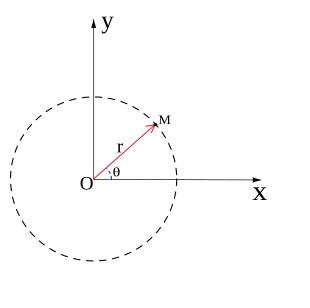
Ponieważ jest to układ dwuwymiarowy, każdy punkt jest określany przez dwa współrzędne polarne, współrzędne promieniowe i współrzędne kątowe. Współrzędna promieniowa (często zauważana R lub ρ i nazywane promieniem) wyraża odległość od punktu do centralnego punktu zwanego biegunem (równoważnym pochodzeniem współrzędnych kartezjańskich). Współrzędna kątowa (zwana także Kąt polarny lub azimut i często zauważano th Lub T ) Wyraża pomiar w kierunku trygonometrycznym (kierunek dodatni), kąta między punktem a kątem w połowie prawicowym 0 °, zwany osą polarną [[[ A ] .
Koncepcja kąta i promienia była już używana podczas I Jest tysiąclecie z. J.-C. Astronom hiparkowy stworzył tabelę trygonometryczną, która dała długość liny dla każdego kąta, i użył współrzędnych polarnych do ustalenia pozycji gwiazd [[[ 3 ] . W Spirale , Archimedes badał spiralę Archimedesa, w której promień zależy od kąta. Jednak Grecy nie rozszerzą go na kompletny układ współrzędnych.
Istnieje kilka wersji wprowadzenia współrzędnych polarnych jako formalny układ współrzędnych. Grégoire de Saint-Vincent i Bonaventura Cavalieri niezależnie wprowadzili tę koncepcję na świat XVII To jest wiek. Saint-Vincent napisał na ten temat w 1625 r. I opublikował swoją pracę w 1647 r., Podczas gdy Cavalieri opublikował swoje pisma w 1635 r., W 1653 roku urodziła się poprawiona wersja. Blaise Pascal w dużej mierze używał współrzędnych polarnych do obliczenia długości przypowieści.
W Metoda przepływu (Napisane w 1671 r., Opublikowane w 1736 r.) Izaak Newton badał transformacje między współrzędnymi polarnymi, które nazwał „siódmym sposobem; dla spirali”, a dziewięć innych układów współrzędnych [[[ 4 ] . W gazecie Acta się nauczył (1691), Jacques Bernoulli użył systemu z punktem i prawą, zwaną odpowiednio słupem i osą polarną. Dane kontaktowe zostały określone przez ich odległość do bieguna i kąt w porównaniu do osi polarnej. Bernoulli użył nawet tego systemu do określenia promienia krzywizny krzywych wyrażonych w tym systemie.
Obecny okres współrzędnych polarnych został przyznany Gregorio Fontana i był używany przez włoskich pisarzy XIII To jest wiek. Termin ten pojawia się po raz pierwszy w tłumaczeniu w 1816 r. Przeprowadzone przez George’a Peacocka Traktat z różnicowymi obliczeniami i pełnymi obliczeniami de Sylvestre-François Lacroix [[[ 5 ] W [[[ 6 ] .
Alexis Clairaut jako pierwszy pomyślał o przedłużeniu trzech wymiarowych współrzędnych polarnych, a Leonhard Euler jako pierwszy je naprawdę rozwinął [[[ 7 ] .

Każdy punkt planu jest określany przez współrzędne polarne, które są współrzędną promieniową i współrzędną kątową. Współrzędna promieniowa (często zauważana R Lub R i nazywane promieniem) wyraża odległość od punktu do centralnego punktu zwanego słupem (równoważnym u pochodzenia współrzędnych kartezjańskich). Współrzędna kątowa (zwana także kątem polarnym lub azimutowym i często zauważana T Lub th ) Wyraża pomiar, w kierunku trygonometrycznym, kąta między punktem a prawą półtrwałą, zwaną osą polarną (równoważną osi odciętej w współrzędnych kartezjańskich) [[[ 8 ] .
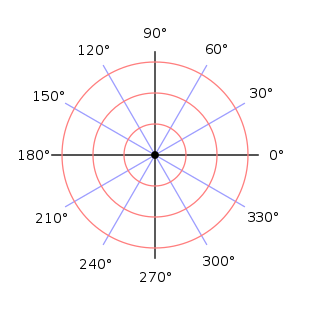
Na przykład punkt współrzędnych polarnych (3; 60 °) zostanie umieszczony trzy jednostki odległości od bieguna w połowie kąta 60 °. Punkt (–3; –120 °) będzie w tym samym miejscu, ponieważ ujemna odległość zostanie uznana za dodatnią miarę na przeciwnej pół linii w odniesieniu do bieguna (trasa po 180 ° w porównaniu z pierwotnym pół-prawym) .
Jednym z ważnych aspektów układu współrzędnych polarnych, który nie jest obecny w układzie kartezjańskim, jest to, że istnieje nieskończoność współrzędnych polarnych oznaczających ten sam i jedyny punkt. Rzeczywiście, możemy dodać pomiary pełnej wieży bez wpływu na lokalizację punktu. Na przykład punkt (3; 420 °) jest mylony z punktem (3; 60 °). Ogólnie rzecz biorąc R ; th ) może być reprezentowany przez ( R ; th ± 2 N Π) lub (- R ; th ± (2 N + 1) π), gdzie N to każda liczba całkowita, a kąty są odnotowane w radianach [[[ 9 ] .
Dowolne dane kontaktowe (0; th ) są konwencjonalnie używane do reprezentowania bieguna, bez martwienia się o wartość przypisaną w tym przypadku kątowi th , punkt promienia R = 0 zawsze będzie na biegunie [[[ dziesięć ] . Aby uzyskać pojedynczy przedstawiciel punktu, ograniczamy promień do dodatniego rzeczywistości i kąt między –180 ° a 180 ° (lub 0 ° i 360 °), lub jeśli używamy radian między –π i π (lub 0 i 2π). Mówi się, że kąt jest podany moduł 360 ° lub 2π [[[ 11 ] .
Kąt w notacji polarnej jest ogólnie podawany w stopniach lub radianach, przy użyciu konwencji 2π = 360 °. Wybór zależy od kontekstu. W nawigacji stopnie są niezbędne, podczas gdy niektóre zastosowania fizyczne (takie jak badanie obrotów mechanicznych), a większość matematyki używa radian [[[ dwunasty ] .
Konwersja między układem polarnym a kartezjańskim [[[ modyfikator |. Modyfikator i kod ]

Dwa współrzędne polarne R i θ można przekształcić w współrzędne kartezjańskie X I I Za pomocą funkcji trygonometrycznych zatok i cosinus:

Dwa kartezjańskie dane kontaktowe X I I Pozwól na obliczenie pierwszej współrzędnej polarnej R o :
- (przez proste zastosowanie twierdzenia Pitagorasa).

Aby określić drugi (kąt θ), musimy rozróżnić dwa przypadki:
- Dla R = 0, kąt może przyjąć dowolną wartość rzeczywistą;
- Dla R ≠ 0, aby uzyskać pojedynczą wartość th , ograniczamy się w przedziale [0, 2 π [(lub w równoważny sposób] -π, π]).
Aby dostać th W międzyczasie [0, 2π [stosuje się następujące wzory (ARCTAN wyznacza wzajemność funkcji stycznej):
![{displaystyle theta ={begin{cases}arctan({frac {y}{x}})&{mbox{si }}x>0{mbox{ et }}ygeq 0,\[3pt]arctan({frac {y}{x}})+2pi &{mbox{si }}x>0{mbox{ et }}y<0,\[3pt]arctan({frac {y}{x}})+pi &{mbox{si }}x<0,\[3pt]{frac {pi }{2}}&{mbox{si }}x=0{mbox{ et }}y>0,\[3pt]{frac {3pi }{2}}&{mbox{si }}x=0{mbox{ et }}y<0.end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fbd4d482600eac8c9ddcccb9fb2c209cfd71eb7d)
Aby uzyskać go w przedziale] –π, π], stosuje się wzory [[[ 13 ] :
![{displaystyle theta ={begin{cases}arctan({frac {y}{x}})&{mbox{si }}x>0,\[3pt]arctan({frac {y}{x}})+pi &{mbox{si }}x<0{mbox{ et }}ygeq 0,\[3pt]arctan({frac {y}{x}})-pi &{mbox{si }}x<0{mbox{ et }}y<0,\[3pt]{frac {pi }{2}}&{mbox{si }}x=0{mbox{ et }}y>0,\[3pt]-{frac {pi }{2}}&{mbox{si }}x=0{mbox{ et }}y<0.end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e526e174429255b93b5b8ddbd57ca30cc10adba1)
Aby dostać th W międzyczasie] -π, π [możemy również użyć następującego wzoru, bardziej zwięzłego:

który jest ważny dla dowolnego punktu planu, z wyjątkiem pół-osi negatywnej odcięcia.
Możesz także użyć funkcji ATAN2:

Lub funkcja ARCCOS lub ARCSIN: patrz liczba złożona#współrzędne polarne.
Równanie, które definiuje krzywą algebraiczną wyrażoną we współrzędnych polarnych, jest znane jako równanie polarne. W większości przypadków takie równanie można określić, definiując R jako funkcja θ. Powstała krzywa jest następnie tworzona z punktów typu ( R ( th ); th ) i może być postrzegane jako wykres funkcji polarnej R .
Różne formy symetrii można odliczyć od równania funkcji polarnej. Jeśli R (—T) = R (θ) Następnie krzywa jest symetryczna w odniesieniu do osi poziomej (półtrwale 0 ° i 180 °). Jeśli R (Liczba Pi – th ) = R ( th ), krzywa będzie symetryczna w odniesieniu do osi pionowej (90 ° i 270 °).
Ze względu na okrągły charakter współrzędnych polarnych wiele krzywych można opisać prostym równaniem polarnym, podczas gdy ich równanie kartezjańskie byłoby znacznie bardziej skomplikowane. Niektóre najsłynniejsze krzywe polarne to: spirala Archimedesa, lemniscate of Bernoulli, Limçon de Pascal lub Cardioid.
Koło [[[ modyfikator |. Modyfikator i kod ]

Ogólne równanie środkowego koła ( R 0 ; Phi ) i promień A Wschód :

W wielu przypadkach to równanie jest uproszczone [[[ 14 ] . Na przykład,
- Dla okręgu wyśrodkowanego na słupie i promieniu A :

- dla okręgu przechodzącego przez słup ( R 0 = a):

PRAWIDŁOWY [[[ modyfikator |. Modyfikator i kod ]

- Linia promieniowy (który przechodzi przez biegun) jest reprezentowany przez równanie:

-
- Lub Phi , Stała, odpowiada kątowi prawej. Więc mamy Phi = ArcTan M Lub M jest nachyleniem prawa do współrzędnych kartezjańskich.
- Linia nieRradial który przecina prostopadle do punktu ( R 0 ; Phi ) prawo promieniowy Zdefiniowane przez jego stały kąt Phi , żeby to prawda nieRradial lub styczna hipotetycznego kręgu o promieniu R 0 , ma równanie:

-
- lub zgodnie z równoważnym funkcją trygonometryczną siedzącej:

-
- z Phi Stały i th należeć do .

Rozeta [[[ modyfikator |. Modyfikator i kod ]
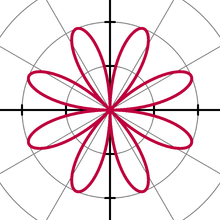
Rosetka to dobrze znana krzywa, która wygląda jak płatki kwiatów, które można wyrazić proste równanie polarne:

Dla każdej prawdziwej stałej Phi 0 . I k jest liczbą całkowitą, to równanie wytwarza kwiat z 2 k Płatkowe (y) IF k jest równorzędny i k Płatkowe (y) IF k to jest dziwne. Jeśli k jest racjonalną liczbą, równanie wytwarza krzywą w kształcie kwiatu, którego płatki nakładają się. Równania te nie mogą dostarczyć z krzywej w kształcie kwiatu do 2, 6, 10, 14 … płatków. Prawdziwa stała A Na końcu określa długość płatka z centrum.
Archimedes Spiral [[[ modyfikator |. Modyfikator i kod ]

Spirala Archimedesa to spirala odkryta przez Archimedesa, którą można również wyrazić z równania polarnego:

Zmień parametr A obraca spiralę wokół słupa, a B Określa odległość między ramionami, która dla danej spirali jest stała. Spirala Archimedes ma dwie ramiona, połączone z słupem: jeden dla th ≥ 0 a drugi th ≤ 0 , Kiedy A = 0 , a następnie każde ramię jest symetryczne z drugiej w porównaniu do osi pionowej (90 °/270 °). Ta krzywa jest jedną z pierwszych krzywej, po kondycjach, która jest opisana terminami matematycznymi i jest przykładem krzywej wyrażonej po prostu we współrzędnych polarnych.
Stożkowy [[[ modyfikator |. Modyfikator i kod ]

Stożka z domem pomylonym z słupem i innym na osi polarnej (0 °), przy czym równanie: duża oś jest mylona z osą polarną):

Lub To jest jest ekscentryczność i P nazywa się parametrem stożkowym i odpowiada długości odcinka prostopadłego do dużej osi łączącej palenisko do krzywej. Jeśli To jest > 1 Równanie definiuje hiperbola, jeśli To jest = 1, przypowieść, jeśli To jest <1 elipsa. Wreszcie dla To jest = 0 otrzymujemy okrąg promienia P .





Każda liczba złożona może być reprezentowana przez punkt w planie złożonym, a ponadto może być wyrażony przez jego współrzędne kartezjańskie (zwane formą algebraiczną liczby złożonej) lub przez jego współrzędne polarne.
Algebraiczna forma złożonej liczby z jest w formie:

Lub X I I są prawdziwe i I jest wyobrażoną jednością.
Jego kształt polarny wynosi (zgodnie z podanymi powyżej wzorami):

Lub R jest prawdziwym pozytywnym lub zerowym ( R Zero, jeśli i tylko z wynosi zero) i θ prawdziwe. Stamtąd wywnioskujemy:
Co jest równoważne, według wzoru Eulera [[[ 15 ] (Należy pamiętać, że wszystkie te wzory, podobnie jak wszystkie inne korzystające z wykładnicze lub kąty, używają radian). Aby przekonwertować z jednego kształtu na drugi, podane powyżej wzory są odpowiednie).
Dodanie liczb złożonych jest łatwiejsze w kształcie algebraicznym, ale mnożenie, podział i wykładniczy są łatwiejsze do osiągnięcia w wykładniczym (lub w równoważny sposób w kształcie polarnym):
- Mnożenie:
- Dział :
- Wykładniczy (formuła moivate) z N cały :



Obliczenia nieskończenie małe można zastosować do równań wyrażonych we współrzędnych polarnych. Współrzędna kątowa th wyraża się w Radian, co jest naturalnym wyborem w analizie [[[ 16 ] W [[[ 17 ] .
Obliczenia różnicowe i zmiana zmiennych polarnych [[[ modyfikator |. Modyfikator i kod ]
Jakobska macierz zmiany zmiennej polarnej
jest napisane
 jest napisane
jest napisane - W

To, co piszemy również w następującym formularzu:
- ;
- .


Drugie pochodne są również wyrażane przez matrycę.
Jednorodni operatorzy

są uzyskiwane matrycznie przez:
- W

gdzie zauważyliśmy, aby rozjaśnić wyrażenie, C zamiast cos th I S za grzech th .
Mamy również ten sam rodzaj zmiany kolejnych pochodnych poprzez matryce dla wszystkich zamówień pochodzenia.
Zróżnicowane i współrzędne biegunowe krzywa [[[ modyfikator |. Modyfikator i kod ]
Aby znaleźć karteńskie zbocze stycznej do krzywej polarnej R ( th ) W danym punkcie krzywa musi być najpierw wyrażona w układzie parametrycznym:
- .

Następnie różnicujemy dwa równania:
- .

Dzieląc drugie równanie przez pierwsze, w punkcie uzyskujemy kartezjańskie zbocze stycznej na krzywej polarnej ( R ( th ); th ):
- .

Więc do rzeczy ( R ( th ); th ), l’angle C między osą Wół a styczna do krzywej jest podawana przez związek:
- .



W przypadku okręgu przechodzącego przez pochodzenie, centrum Oh = ( R 0 ; A ) i promień R 0 , równania:
- W

Dawanie formuły C (patrz rysunek przeciwny) prowadzi do
- W

Pokazuje to przechodzenie twierdzenia wpisanego kąta i kąta w środku.
Obliczenia integralne [[[ modyfikator |. Modyfikator i kod ]


Albo R powierzchnia planu ograniczona przez krzywą ciągłą R ( th ) i pół-prawy th = A I th = B , gdzie 0 < B – A <2 Liczba Pi ( A I B bycie prawdziwym). Więc obszar S tej powierzchni jest
- .

Wynik można znaleźć na podstawie następującego uzasadnienia. Po pierwsze, interwał [ A W B ] jest podzielony na N Podseteryle, gdzie N jest jakąkolwiek pozytywną liczbą całkowitą. Następnie δ th , długość każdego sub-interval jest równa B – A podzielony przez N , liczba pod-interfejsów. Dla każdego pod-interval I = 1, 2, …, N , albo th I Środek każdego pod-interval I . Następnie możemy zbudować sektor okrągły, w którym środkiem jest biegun, promień R ( th I ), d’angle d th i długość łuku R ( th I ) D th . Strefa S I każdego sektora jest zatem

I tak całkowita powierzchnia wszystkich sektorów to:
- .

Dla N W kierunku nieskończoności aproksymacja staje się lepsza, a suma ta jest sumą Riemanna, a zatem zbiega się w kierunku żądanej całki:
- .

Uogólnienie [[[ modyfikator |. Modyfikator i kod ]
Korzystając z współrzędnych kartezjańskich, element obszaru nieskończenie małego można obliczyć jako A = D X D I . Zasada zmiany zmiennej dla wielu całek stanowi, że przy użyciu innych układów współrzędnych jakobian macierzy konwersji współrzędnych wynosi:
- .

Element obszaru nieskończenie małego można zatem zobaczyć
- .

Teraz dana funkcja we współrzędnych polarnych można zintegrować w ten sposób
- .

Tutaj R to ta sama powierzchnia jak powyżej, to znaczy powierzchnia między krzywą R ( th ) i pół-prawy th = A I th = B .
Formuła obszaru R wspomniane powyżej znajduje się, biorąc F Stała funkcja równa 1. Jednym z zastosowań tych wzorów jest obliczenie całki Gaussa
.
 .
. Analiza wektorowa [[[ modyfikator |. Modyfikator i kod ]
Analizę wektorów można również zastosować do współrzędnych polarnych. Albo
Wektor pozycji
 Wektor pozycji
Wektor pozycji , z R I th Zależny czas T i albo
 , z R I th Zależny czas T i albo
, z R I th Zależny czas T i albo wektor jednostkowy w tym samym kierunku co
 wektor jednostkowy w tym samym kierunku co
wektor jednostkowy w tym samym kierunku co I
wektor jednostki ortogonalnej na
 wektor jednostki ortogonalnej na
wektor jednostki ortogonalnej na . Pierwsze i drugie pochodne wektora pozycji są podane przez:
- ;
- .


Układ współrzędnych polarnych można rozszerzyć na zwykłą przestrzeń o trzech wymiarach na dwa sposoby, co daje cylindryczny układ współrzędnych i sferyczny układ współrzędnych. Pojęcie cylindrycznych współrzędnych polega na dodaniu współrzędnej odległości, podczas gdy układ sferyczny dodaje współrzędną kątową.
Cylindryczne dane kontaktowe [[[ modyfikator |. Modyfikator i kod ]

Cylindryczny układ współrzędnych jest układem współrzędnych, który rozszerza dwóch wymiarowy układ współrzędnych polarnych poprzez dodanie trzeciego wymiaru, który mierzy wysokość punktu w porównaniu z płaszczyzną zidentyfikowaną przez współrzędne polarne; W ten sam sposób, w jaki rozszerzamy system współrzędnych kartezjańskich z dwóch do trzech wymiarów. Często odnotowano trzecią współrzędną H Lub z . Notacja R Mając systematycznie używane we współrzędnych sferycznych (patrz poniżej), wolimy grecki list tutaj R .
Trzy cylindryczne współrzędne można przekształcić w współrzędne kartezjańskie przez:

Sferyczne dane kontaktowe [[[ modyfikator |. Modyfikator i kod ]



Współrzędne polarne można również rozszerzyć na trójwymiarową przestrzeń euklidesową, zgodnie z różnymi konwencjami oceny.
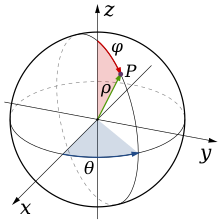
W fizyce najczęściej używamy współrzędnych ( R W th W Phi ), Lub R wyznacza odległość od punktu do słupa, th to kąt od osi z (zwany colavititude lub zenith, między 0 ° a 180 °) i Phi to kąt od osi X (Jak we współrzędnych polarnych, między 0 ° a 360 °).
W matematyce, mianując dane kontaktowe ( R W th W Phi ), Lub R zawsze wyznacza odległość od punktu do bieguna, podczas gdy th Tym razem wyznacza długość geograficzną (kąt mierzony od osi X oraz od –180 ° do 180 °) i Phi Szerokość, kąt z płaszczyzny równikowej (między –90 ° a 90 °).
System mieszany polega na stosowaniu w porządku, promieniu, długości geograficznej, a następnie colavity, wciąż odnotowano ( R W th W Phi ).
Te trzy układy współrzędnych są przykładami współrzędnych sferycznych i są podobne do układu używanego do znalezienia drogi na powierzchni Ziemi. Każdy z nich ma własne użycie, ale musimy uważać, aby w fizyce wymieniamy th Colavitude w matematyce, ogólnie nazywamy th Długość Szerokość ( Phi w matematyce) i colavity ( th w fizyce) są dla siebie komplementarne [[[ 18 ] , łatwo jest przejść z jednego systemu do drugiego.
Trzy współrzędne sferyczne można przekształcić w współrzędne kartezjańskie przez:

w układzie ukierunkowania promienia (fizycznie) i

W systemie promieniowania (matematyki).
Polarne dane kontaktowe są dwukierunkowe i dlatego mogą być używane tylko w przypadkach, w których punkty znajdują się w tej samej płaszczyźnie. Są bardziej odpowiednie we wszystkich przypadkach, w których rozważane zjawisko jest powiązane z kierunkiem i długością punktu centralnego. Na przykład przykłady zdefiniowanych powyżej krzywych polarnych pokazują, w jaki sposób możemy użyć współrzędnych polarnych do wytwarzania prostych równań wytwarzających te krzywy, takie jak spiral archimedes. Te same równania we współrzędnych kartezjańskich byłyby znacznie bardziej skomplikowane. Ponadto wiele badań systemów fizycznych, takich jak badanie wahadła lub dowolne zjawisko, w którym stałe poruszają się wokół punktu centralnego, jest uproszczone poprzez przekazanie współrzędnych polarnych. Wprowadzenie współrzędnych polarnych przeprowadzono najpierw w celu zbadania ruchów kołowych i ruchów orbitalnych.
[[[ modyfikator |. Modyfikator i kod ]
Polarne dane kontaktowe są często używane podczas nawigacji. Rzeczywiście, podróż można zdefiniować w odległości i kąt w porównaniu do miejsca docelowego. Na przykład samolot używa nieco zmodyfikowanego systemu współrzędnych polarnych do nawigacji.
Modelowanie [[[ modyfikator |. Modyfikator i kod ]
Współrzędne polarne prowadzą do uproszczenia modelu systemów naturalnych, w którym punkt centralny odgrywa szczególną rolę. Jest to szczególnie w przypadku systemów z symetrią obrotu, to znaczy tych, które są niezmienne przez obrót wokół ustalonego punktu.
Jest tak w przypadku tak zwanych systemów centralnych, to znaczy z zastrzeżeniem siły, która przechodzi przez stały punkt. Klasyczne przykłady obejmują problem z dwoma ciałami (w grawitacji lub elektromagnetyzmie), a bardziej ogólnie w badaniu ruchu planet [[[ 19 ] , a także systemy z określonym źródłem (W) , jak anteny radiowe.
Jest to również przypadek ruchów obrotu wokół ustalonego punktu, takiego jak proste wahadło, salda sald wokół studni, takiego jak równanie przepływu wody lub zmienność ilości w zależności od kąta, takiego jak polarna lotnicza lub kierunkowość mikrofonu , który charakteryzuje czułość mikrofonu jako funkcję pochodzenia dźwięku zgodnie z centralną osą mikrofonu.
Zjawisko to może być reprezentowane przez krzywą polarną. Krzywa dla standardowego mikrofonu sercowego, najczęstszych mikrofonów, ma równanie R = (1+sin th )/2 [[[ 20 ] .
Wreszcie istnieją szczególne przypadki, w których przejście do współrzędnych polarnych może być obsługiwane. Na przykład prawo Laplace-Gauss w statystykach ma rozkład, którego nie można zintegrować za pomocą funkcji podstawowych. Jednak obracając tę krzywą wokół osi I Dostajemy Dzwonek Infinite, który, wyrażony we współrzędnych polarnych, jest zintegrowany. W ten sposób Gauss był w stanie znormalizować to prawo statystyczne, którego Laplace wykazał uniwersalność.
Notatki [[[ modyfikator |. Modyfikator i kod ]
- W niektórych przypadkach, w szczególności krzywych owijających się kilka razy wokół pochodzenia, może być wygodne usunięcie ograniczenia ( I ) i użyj równoważnych współrzędnych Lub , Lub N jest dowolną liczbą całkowitą.




Bibliografia [[[ modyfikator |. Modyfikator i kod ]
- (W) Michael Friendly Et Daniel J. Denis, ‘ Kamienie milowe w historii kartografii tematycznej, grafiki statystycznej i wizualizacji danych » .
- (W) C. B. Boyer, ‘ Newton jako twórcy współrzędnych polarnych » W American Mathematical Monthly W tom. 56, W P. 73-78 (Jstor 2306162 ) .
- (W) Jeff Miller, ‘ Najwcześniejsze znane zastosowania niektórych słów matematyki » .
- (W) David Eugene Smith, Historia matematyki W tom. 2, Boston, idź i co., W P. 324 .
- (W) Julian Coolidge, ‘ Pochodzenie współrzędnych polarnych » W Amer. Matematyka. Miesięczny W tom. 59, W P. 78-85 (Jstor 2307104 W wznawiać ) .
- (W) Richard G. Brown et Andrew M. Gleason, Zaawansowana matematyka: precalculus z dyskretną matematyką i analizą danych , Evanston, Illinois, McDougal Littell, (ISBN 0-395-77114-5 ) .
- (W) ‘ Współrzędne i wykresy polarne » , NA Fortbendisd.com W .
- (W) Theodore Lee, David Cohen et David Sclar, Precalculus: z trygonometrią jednostkowym , Thomson Brooks/Cole, W 4 To jest wyd. (ISBN 0-534-40230-5 ) .
- (W) Ian Stewart et David Tall, Złożona analiza (przewodnik autostopu po płaszczyźnie) , FILIŻANKA, , 290 P. (ISBN 0-521-28763-4 W Czytaj online ) .
- (W) Raymond A. Serway et John W. Jewett Jr., Zasady fizyki: tekst oparty na rachunku różniczym , Brooks/Cole – Thomson Learning, , 1150 P. (ISBN 0-534-49143-X ) .
- (W) Bruce Follett Torrence i Eve Torrence, Wprowadzenie ucznia do Mathematica , FILIŻANKA, (ISBN 0-521-59461-8 ) .
- (W) Johan Claeys, ‘ Współrzędne polarne » , NA ping.be .
- (W) Julius O. Smith, Matematyka dyskretnej transformacji Fouriera (DFT) , W3K Publishing, W 2 To jest wyd. ( Pierwszy Odnośnie wyd. 2003), 306 P. (ISBN 978-0-9745607-4-8 W Czytaj online ) , «Tożsamość Eulera» .
- (W) Lawrence S. Husch, ‘ Obszary ograniczone krzywymi polarnymi » , NA Archives.math.utk.edu .
- (W) Lawrence S. Husch, ‘ Linie styczne do wykresów polarnych » , NA Archives.math.utk.edu .
- (W) Frank Wattenberg, ‘ Współrzędne sferyczne » , NA Math.Montana.edu W .
- Jacques Dixmier, Pierwszy kurs matematyki cyklu, pierwszy rok , Gauthier-Villars, (ISBN 2040157735 ) W P. 453 .
- (W) John Eargle, Podręcznik inżynierii nagrywania , Springer, W 4 To jest wyd. , 436 P. (ISBN 0-387-28470-2 W Czytaj online ) .
Powiązane artykuły [[[ modyfikator |. Modyfikator i kod ]
Link zewnętrzny [[[ modyfikator |. Modyfikator i kod ]
(W) spherical.pdf Propozycja ujednolicenia notacji polarnych 2D i 3D.
Bibliografia [[[ modyfikator |. Modyfikator i kod ]
- (W) Howard Anton, Irl Bivens et Stephen Davis, Rachunek różniczkowy W Pojedyncza zmienna , John Wiley & Sons, W dziesięć To jest wyd. , 880 P. (ISBN 978-0-470-64770-7 W Czytaj online ) W P. 705-719
- (W) Ross Finney, George B. Thomas (W) , Franklin prosi o Et Bert Waits, Rachunek: graficzny, numeryczny, algebraiczny: wersja pojedyncza zmienna , Addison-Wesley, , 1104 P. (ISBN 978-0-01-55478-6 )
- [Taillet, złoczyńca i luty 2018] R. Tablelet W L. Złoczyńca I P. Luty W Słownik fizyki , Louvain-La-neuve, de Boeck Pić małymi łykami. , na zewnątrz coll. W W 4 To jest wyd. ( Pierwszy Odnośnie wyd. ), Pierwszy tom. W X -956, chory. I Figa. , 24 cm (ISBN 978-2-8073-0744-5 , Ean 9782807307445 , OCLC 1022951339 , Sudoc 224228161 W Prezentacja online W Czytaj online ) W S.V. współrzędne polarne, P. 160, przełęcz. 2 .
Recent Comments