Relaxed intersection – Wikipedia
The relaxed intersection of m sets corresponds to the classical
intersection between sets except that it is allowed to relax few sets in order to avoid an empty intersection.
This notion can be used to solve Constraints Satisfaction Problems
that are inconsistent by relaxing a small number of constraints.
When a bounded-error approach is considered for parameter estimation,
the relaxed intersection makes it possible to be robust with respect
to some outliers.
Definition[edit]
The q-relaxed intersection of the m subsets
of

,
denoted by
 ,
,
is the set of all

which belong to all

‘s, except

at most.
This definition is illustrated by Figure 1.


Define

We have
![{displaystyle X^{{q}}=lambda ^{-1}([m-q,m]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1a061a3400e3891d6b2019b6f5577398e3af8766)
Characterizing the q-relaxed intersection is a thus a set inversion problem.
[1]
Example[edit]
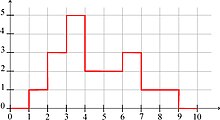
Consider 8 intervals:
![{displaystyle X_{1}=[1,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/af99892b7ed95bc8b01972b7be903134c2cba0f6)
![{displaystyle X_{2}= [2,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f9531f6c8b6ff361af716c5c8155d0cd3007425b)
![{displaystyle X_{3}=[2,7],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ba7b91e36dc6f2c88dfaa80d1ee0bf336644c5c7)
![{displaystyle X_{4}=[6,9],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fce11a196f5e840bf955d7d7bffb4c8cc86cf62)
![{displaystyle X_{5}=[3,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6dd8dafdc016bd7fb9b7fcefe19a7a4dc7d471fb)
![{displaystyle X_{6}=[3,7].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/562b9e580672a7c75318ac96a7995ec3fab13587)
We have

![{displaystyle X^{{1}}=[3,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d7928014128a53893e7d057601d027b84c9f9a0b)
![{displaystyle X^{{2}}=[3,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/80dac0757559626654549f071041b301a8f90621)
![{displaystyle X^{{3}}=[2,4]cup [6,7],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ece0be4f2d5a10db46776a9c106ca65b79b96d4)
![{displaystyle X^{{4}}=[2,7],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b3fc1592c25b36e319d639b0f5b52fb1e7b885fc)
![{displaystyle X^{{5}}=[1,9],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/48f7fda52531e256cee2b6d9440d64ce21be8dae)
![{displaystyle X^{{6}}=]-infty ,infty [.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd443cc01f235d00232b0e04e637bff1a3f723b5)
Relaxed intersection of intervals[edit]
The relaxed intersection of intervals is not necessary an interval. We thus take
the interval hull of the result. If
‘s are intervals, the relaxed
intersection can be computed with a complexity of m.log(m) by using the
Marzullo’s algorithm. It suffices to
sort all lower and upper bounds of the m intervals to represent the
function
. Then, we easily get the set
 . Then, we easily get the set
. Then, we easily get the set
![{displaystyle X^{{q}}=lambda ^{-1}([m-q,m])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/294b77be8504fee0a62cbc855b66de2badd9b759)
which corresponds to a union of intervals.
We then return the
smallest interval which contains this union.
Figure 2 shows the function
associated to the previous example.

Relaxed intersection of boxes[edit]
To compute the q-relaxed intersection of m boxes of
, we project all m boxes with respect to the n axes.
For each of the n groups of m intervals, we compute the q-relaxed intersection.
We return Cartesian product of the n resulting intervals.
[2]
Figure 3 provides an
illustration of the 4-relaxed intersection of 6 boxes. Each point of the
red box belongs to 4 of the 6 boxes.

Relaxed union[edit]
The q-relaxed union of
is defined by

Note that when q=0, the relaxed union/intersection corresponds to
the classical union/intersection. More precisely, we have

and

De Morgan’s law[edit]
If
denotes the complementary set of
 denotes the complementary set of
denotes the complementary set of , we have


As a consequence

Relaxation of contractors[edit]
Let
be m contractors for the sets
 be m contractors for the sets
be m contractors for the sets ,
then
![{displaystyle C([x])=bigcap ^{{q}}C_{i}([x]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/788587729f7e8ca9fb9fe1fdd1102cecdc2a0f1d)
is a contractor for
and

![{displaystyle {overline {C}}([x])=bigcap ^{{m-q-1}}{overline {C}}_{i}([x])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d59a6070cd4b8efebd4b14a71f7d2d0497ae2d7b)
is a contractor for
, where
 , where
, where

are contractors for

Combined with a branch-and-bound algorithm such as SIVIA (Set Inversion Via Interval Analysis), the q-relaxed
intersection of m subsets of
can be computed.
Application to bounded-error estimation[edit]
The q-relaxed intersection can be used for robust localization
[3][4]
or for tracking.
[5]
Robust observers can also be implemented using the relaxed intersections to be robust with respect to outliers.
[6]
We propose here a simple example
[7]
to illustrate the method.
Consider a model the ith model output of which is given by

where
. Assume that we have
 . Assume that we have
. Assume that we have
![{displaystyle f_{i}(p)in [y_{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/64f73d68f14eabca9ecdda9f468cc96106ecc7bd)
where
and
 and
and are given by the following list
![{displaystyle [y_{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e0733aa435bd20b12b259b38350ab7b3e2bd2a9d) are given by the following list
are given by the following list
![{displaystyle {(1,[0;0.2]),(2,[0.3;2]),(3,[0.3;2]),(4,[0.1;0.2]),(5,[0.4;2]),(6,[-1;0.1])}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eefb2caf9e7b28cf4e0a7f3c3f7a3524bc186ba7)
The sets
for different
 for different
for different are depicted on
Figure 4.

References[edit]
- ^
Jaulin, L.; Walter, E.; Didrit, O. (1996). Guaranteed robust nonlinear parameter bounding (PDF). In Proceedings of CESA’96 IMACS Multiconference (Symposium on Modelling, Analysis and Simulation). - ^ Jaulin, L.; Walter, E. (2002). “Guaranteed robust nonlinear minimax estimation” (PDF). IEEE Transactions on Automatic Control. 47.
- ^ Kieffer, M.; Walter, E. (2013). Guaranteed characterization of exact non-asymptotic confidence regions in nonlinear parameter estimation (PDF). In Proceedings of IFAC Symposium on Nonlinear Control Systems, Toulouse : France (2013).
- ^ Drevelle, V.; Bonnifait, Ph. (2011). “A set-membership approach for high integrity height-aided satellite positioning”. GPS Solutions. 15 (4).
- ^ Langerwisch, M.; Wagner, B. (2012). “Guaranteed Mobile Robot Tracking Using Robust Interval Constraint Propagation”. Intelligent Robotics and Applications..
- ^ Jaulin, L. (2009). “Robust set membership state estimation ; Application to Underwater Robotics” (PDF). Automatica. 45: 202–206. doi:10.1016/j.automatica.2008.06.013.
- ^ Jaulin, L.; Kieffer, M.; Walter, E.; Meizel, D. (2002). “Guaranteed robust nonlinear estimation, with application to robot localization” (PDF). IEEE Transactions on systems, man and cybernetics; Part C Applications and Reviews. 32. Archived from the original (PDF) on 2011-04-28.
Recent Comments