Velocity – Wikipedia wiki
Vitesse et direction d’un mouvement
| Rapidité | |
|---|---|

Alors qu’un changement de direction se produit pendant que les voitures de course allument la piste incurvée, leur vitesse n’est pas constante. |
|
|
Symboles communs |
dans , dans , dans → |
|
Autres unités |
mph, ft / s |
| Dans Unités de base SI | SP |
| Dimension | L T −1 |
Rapidité est la vitesse directionnelle d’un objet en mouvement comme indication de son taux de variation de position comme observé à partir d’un cadre de référence particulier et mesuré par une norme de temps particulière (par ex. 60 km / h en direction du nord). La vitesse est un concept fondamental dans la cinématique, la branche de la mécanique classique qui décrit le mouvement des corps.
La vitesse est une quantité de vecteur physique; La magnitude et la direction sont nécessaires pour la définir. La valeur absolue scalaire (magnitude) de la vitesse est appelée vitesse , étant une unité dérivée cohérente dont la quantité est mesurée dans le Si (système métrique) en mètres par seconde (m / s ou m⋅s −1 ). Par exemple, “5 mètres par seconde” est un scalaire, tandis que “5 mètres par seconde est” est un vecteur. S’il y a un changement de vitesse, de direction ou les deux, alors l’objet est censé subir un accélération .
Vitesse constante vs accélération
Avoir un vitesse constante , un objet doit avoir une vitesse constante dans une direction constante. La direction constante limite l’objet au mouvement dans un chemin droit Ainsi, une vitesse constante signifie le mouvement en ligne droite à une vitesse constante.
Par exemple, une voiture se déplaçant à 20 kilomètres constante par heure dans un chemin circulaire a une vitesse constante, mais n’a pas de vitesse constante car sa direction change. Par conséquent, la voiture est considérée comme subissant une accélération.
Différence entre la vitesse et la vitesse

La vitesse, l’amplitude scalaire d’un vecteur de vitesse, indique uniquement à quelle vitesse un objet se déplace. [d’abord] [2]
Équation du mouvement
Vitesse moyenne
La vitesse est définie comme le taux de changement de position par rapport au temps, qui peut également être appelé vélocité instantanée pour souligner la distinction de la vitesse moyenne. Dans certaines applications, le vitesse moyenne d’un objet peut être nécessaire, c’est-à-dire la vitesse constante qui fournirait le même déplacement résultant qu’une vitesse variable dans le même intervalle de temps, dans ( t ) , sur une période de temps D t . La vitesse moyenne peut être calculée comme:

La vitesse moyenne est toujours inférieure ou égale à la vitesse moyenne d’un objet. Cela peut être vu en réalisant que si la distance est toujours strictement augmentée, le déplacement peut augmenter ou diminuer d’ampleur ainsi que changer de direction.
En termes de temps de déplacement ( X contre. t ) Graphique, la vitesse instantanée (ou, simplement la vitesse) peut être considérée comme la pente de la ligne tangente à la courbe à tout moment, et la vitesse moyenne comme pente de la ligne sécante entre deux points avec t coordonnées égales aux limites de la période de temps pour la vitesse moyenne.
La vitesse moyenne est la même que la vitesse en moyenne dans le temps – c’est-à-dire sa moyenne pondérée dans le temps, qui peut être calculée comme l’intégrale de la vitesse:

où nous pouvons identifier

et

Vélocité instantanée
Si nous considérons dans comme vitesse et X En tant que vecteur de déplacement (changement de position), nous pouvons alors exprimer la vitesse (instantanée) d’une particule ou d’un objet, à un moment particulier t , comme dérivé de la position par rapport au temps:

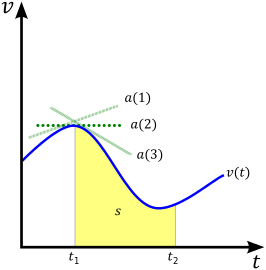
De cette équation dérivée, dans le cas unidimensionnel, on peut voir que la zone sous une vitesse par rapport au temps ( dans contre. t graphique) est le déplacement, X . En termes de calcul, l’intégrale de la fonction de vitesse dans ( t ) est la fonction de déplacement X ( t ) . Dans la figure, cela correspond à la zone jaune sous la courbe étiquetée s ( s étant une notation alternative pour le déplacement).

Étant donné que le dérivé de la position par rapport au temps donne le changement de position (en mètres) divisé par le changement de temps (en secondes), la vitesse est mesurée en mètres par seconde (m / s). Bien que le concept d’une vitesse instantanée puisse paraître à première vue contre-intuitive, il peut être considéré comme la vitesse dans laquelle l’objet continuerait à voyager s’il cessait d’accélérer à ce moment.
Relation avec l’accélération
Bien que la vitesse soit définie comme le taux de changement de position, il est souvent courant de commencer par une expression pour l’accélération d’un objet. Comme le montre les trois lignes de tangente verte de la figure, l’accélération instantanée d’un objet à un moment donné est la pente de la ligne tangente à la courbe d’un dans ( t ) graphique à ce moment-là. En d’autres termes, l’accélération est définie comme le dérivé de la vitesse par rapport au temps:

De là, nous pouvons obtenir une expression pour la vitesse comme zone sous un un ( t ) Accélération vs graphique de temps. Comme ci-dessus, cela se fait en utilisant le concept de l’intégrale:

Accélération constante
Dans le cas spécial d’accélération constante, la vitesse peut être étudiée à l’aide des équations Suvat. En considérant un En tant qu’égal à un vecteur constant arbitraire, il est trivial de montrer que

avec dans Comme la vitesse au moment t et dans Comme la vitesse au moment t = 0 . En combinant cette équation avec l’équation Suvat X = dans t + un t 2 / 2 , il est possible de relier le déplacement et la vitesse moyenne de

Il est également possible de dériver une expression pour la vitesse indépendante du temps, connu sous le nom d’équation de Torricelli, comme suit:



où dans = | dans | etc.
Les équations ci-dessus sont valables à la fois pour la mécanique newtonienne et la relativité spéciale. Là où la mécanique newtonienne et la relativité spéciale diffèrent, c’est la façon dont les différents observateurs décriraient la même situation. En particulier, dans la mécanique newtonienne, tous les observateurs s’accordent sur la valeur de T et les règles de transformation pour la position créent une situation dans laquelle tous les observateurs non accélérants décriraient l’accélération d’un objet avec les mêmes valeurs. Ni l’un ni l’autre n’est vrai pour la relativité spéciale. En d’autres termes, seule la vitesse relative peut être calculée.
Quantités qui dépendent de la vitesse
L’énergie cinétique d’un objet en mouvement dépend de sa vitesse et est donnée par l’équation

ignorer la relativité spéciale, où ET k est l’énergie cinétique et m est la masse. L’énergie cinétique est une quantité scalaire car elle dépend du carré de la vitesse, mais une quantité apparentée, l’élan, est un vecteur et défini par

Dans une relativité spéciale, le facteur Lorentz sans dimension apparaît fréquemment et est donné par

où γ est le facteur lorentz et c est la vitesse de la lumière.
La vitesse d’échappement est la vitesse minimale dont un objet balistique a besoin pour échapper à un corps massif comme la Terre. Il représente l’énergie cinétique qui, lorsqu’elle est ajoutée à l’énergie potentielle gravitationnelle de l’objet (qui est toujours négative), est égale à zéro. La formule générale pour la vitesse d’échappement d’un objet à distance r du centre d’une planète avec masse M est

où g est la constante gravitationnelle et g est l’accélération gravitationnelle. La vitesse d’échappement de la surface de la Terre est d’environ 11 200 m / s et est indépendamment de la direction de l’objet. Cela rend la «vitesse d’échappement» un peu un terme impropre, car le terme le plus correct serait la «vitesse d’échappement»: tout objet atteignant une vitesse de cette ampleur, quelle que soit l’atmosphère, quittera le voisinage du corps de base aussi longtemps qu’il ne le fera pas t se croisent avec quelque chose sur son chemin.
Vitesse relative
Vitesse relative est une mesure de la vitesse entre deux objets tels que déterminés dans un seul système de coordonnées. La vitesse relative est fondamentale dans la physique classique et moderne, car de nombreux systèmes en physique traitent du mouvement relatif de deux particules ou plus. Dans la mécanique newtonienne, la vitesse relative est indépendante du cadre de référence inertiel choisi. Ce n’est plus le cas avec la relativité spéciale dans laquelle les vitesses dépendent du choix du cadre de référence.
Si un objet A se déplace avec un vecteur de vitesse dans et un objet B avec un vecteur de vitesse Dans , alors la vitesse de l’objet a relatif à L’objet B est défini comme la différence des deux vecteurs de vitesse:

De même, la vitesse relative de l’objet B se déplaçant avec la vitesse Dans , par rapport à l’objet un mouvement avec la vitesse dans est:

Habituellement, le cadre inertiel choisi est celui dans lequel le dernier des deux objets mentionnés est en repos.
Vitesses scalaires
Dans le cas unidimensionnel, [3] Les vitesses sont des scalaires et l’équation est soit:
- , si les deux objets se déplacent dans des directions opposées, ou:
- , si les deux objets se déplacent dans la même direction.


Coordonnées polaires

Dans les coordonnées polaires, une vitesse bidimensionnelle est décrite par une vitesse radiale, définie comme la composante de la vitesse loin ou vers l’origine (également connue sous le nom de Velocity a fait du bien ), et une vitesse angulaire, qui est le taux de rotation autour de l’origine (avec des quantités positives représentant une rotation dans le sens antihoraire et des quantités négatives représentant une rotation dans le sens horaire, dans un système de coordonnées droitiers).
Les vitesses radiales et angulaires peuvent être dérivées de la vitesse cartésienne et des vecteurs de déplacement en décomposant le vecteur de vitesse en composants radiaux et transversaux. La vitesse transversale est la composante de la vitesse le long d’un cercle centré à l’origine.

où
- est la vitesse transversale
- est la vitesse radiale.


Le Magnitude de la vitesse radiale est le produit DOT du vecteur de vitesse et du vecteur unitaire dans le sens du déplacement.

où
est le déplacement.
 est le déplacement.
est le déplacement. Le Magnitude de la vitesse transversale est celui du produit transversal du vecteur unitaire dans le sens du déplacement et du vecteur de vitesse. C’est aussi le produit de la vitesse angulaire
et l’ampleur du déplacement.
 et l’ampleur du déplacement.
et l’ampleur du déplacement. 
tel que

Le moment angulaire sous forme scalaire est la masse fois la distance à l’origine fois la vitesse transversale, ou de manière équivalente, la masse fois la distance au carré à la vitesse angulaire. La convention de signe pour le moment angulaire est la même que celle de la vitesse angulaire.

où
- est la masse


L’expression
est connu comme un moment d’inertie.
Si les forces ne sont dans le sens radial qu’avec une dépendance carrée inverse, comme dans le cas d’une orbite gravitationnelle, le moment angulaire est constant et la vitesse transversale est inversement proportionnelle à la distance, la vitesse angulaire est inversement proportionnelle à la distance carrée et la part du carré et les carrés et les Le taux à quelle zone est balayé est constant. Ces relations sont connues sous le nom de lois de Kepler sur le mouvement planétaire.
 est connu comme un moment d’inertie.
est connu comme un moment d’inertie.Voir également
Remarques
Les références
- Robert Resnick et Jearl Walker, Fondamentaux de la physique , Wiley; 7 Sous-édition (16 juin 2004). ISBN 0-471-23231-9.
Liens externes
Recent Comments