Influence du train en ligne – Wikipedia wiki
Système de signalisation et de protection des trains dans le cabine

Influence du train de ligne (ou LZB ) est un système de signalisation et de protection des trains de cabine utilisé sur des lignes de chemin de fer allemandes et autrichiennes ainsi que sur l’avenue et certaines lignes de rail de banlieue en Espagne. Le système était obligatoire où les trains étaient autorisés à dépasser des vitesses de 160 km / h (99 mph) en Allemagne et 220 km / h (140 mph) en Espagne. Il est également utilisé sur certaines lignes de transit de chemin de fer et de transport rapide plus lentes pour augmenter la capacité. Le Linienzugbeeinflssung allemand se traduit par Contrôle continu des trains , littéralement: influençant le train linéaire . Il s’appelle aussi Influence du train en forme de ligne .
LZB est obsolète et sera remplacé par un système européen de contrôle des trains (ETC) entre 2023 et 2030. Il est référencé par l’agence de l’Union européenne pour les chemins de fer (ERA) en tant que classe B système de protection des trains dans Contrôle national des trains (NTC). [d’abord] Les voitures conduites doivent principalement remplacer la logique de contrôle classique à ETCS Unités à bord (Obu) avec commun Interface de la machine du pilote (DMI). [2] Parce que les trains à haute performance ne sont souvent pas mis au rebut ou réutilisés sur les lignes de deuxième commande, spécial Modules de transmission spécifiques (STM) pour LZB a été développé pour un soutien supplémentaire à l’installation de LZB. [3]
Aperçu [ modifier ]]


En Allemagne, la distance standard d’un signal distant à son signal d’origine est de 1 000 mètres (3 300 pieds). Dans un train avec des freins forts, il s’agit de la distance de freinage de 160 km / h. Dans les années 1960, l’Allemagne a évalué diverses options pour augmenter les vitesses, notamment l’augmentation de la distance entre les signaux éloignés et domestiques et la signalisation de la cabine. L’augmentation de la distance entre la maison et les signaux éloignés diminuerait la capacité. L’ajout d’un autre aspect rendrait les signaux plus difficiles à reconnaître. Dans les deux cas, les modifications des signaux conventionnelles ne résoudraient pas le problème de la difficulté de voir et de réagir aux signaux à des vitesses plus élevées. Pour surmonter ces problèmes, l’Allemagne a choisi de développer une signalisation continue de CAB.
Le système de signalisation de la CAB LZB a été démontré pour la première fois en 1965, permettant aux trains quotidiens de l’exposition internationale de transport à Munich de fonctionner à 200 km / h. Le système a été développé tout au long des années 1970, puis libéré sur diverses lignes en Allemagne au début des années 1980 et sur des lignes à grande vitesse allemandes, espagnoles et autrichiennes dans les années 1990 avec des trains allant jusqu’à 300 km / h (190 mph). Pendant ce temps, des capacités supplémentaires ont été intégrées dans le système.
LZB se compose d’équipement sur la ligne ainsi que sur les trains. Un segment de piste de 30 à 40 km est contrôlé par un centre de contrôle LZB. [4] L’ordinateur de centre de contrôle reçoit des informations sur les blocs occupés des circuits de piste ou des compteurs d’essieu et des itinéraires verrouillés à partir de verrouillages. Il est programmé avec la configuration de la piste, y compris l’emplacement des points, des taux de participation, des gradients et des limites de vitesse de courbe. Avec cela, il a suffisamment d’informations pour calculer jusqu’où chaque train peut se dérouler et à quelle vitesse.
Le centre de contrôle communique avec le train à l’aide de deux câbles de conducteur qui se déroulent entre les pistes et sont croisés tous les 100 m. Le centre de contrôle envoie des paquets de données, appelés télégrammes, au véhicule qui lui donne son autorité de mouvement (jusqu’où il peut aller et à quelle vitesse) et le véhicule renvoie des paquets de données indiquant sa configuration, ses capacités de freinage, sa vitesse et sa position.
L’ordinateur embarqué du train traite les paquets et affiche les informations suivantes au pilote:
- Vitesse actuelle : dérivé localement de l’équipement de détection de vitesse – illustré avec un compteur standard
- Vitesse autorisée : vitesse maximale autorisée maintenant – illustrée avec une ligne rouge ou un triangle à l’extérieur du compteur de vitesse
- Vitesse cible : vitesse maximale à une certaine distance – illustrée avec des nombres LED au bas du compteur de vitesse
- Distance cible : Distance pour la vitesse cible – montrée avec des barres LED montrant jusqu’à 4000 m, avec des nombres pour des distances plus longues
S’il y a une longue distance libre devant le train, le conducteur verra la vitesse cible et la vitesse autorisée égale à la vitesse de ligne maximale, avec la distance montrant la distance maximale, entre 4 km et 13,2 km selon l’unité, le train, et ligne.
Alors que le train s’approche d’une restriction de vitesse, comme une pour une courbe ou un taux de participation, LZB sonnera un buzzer et affichera la distance et la vitesse de la restriction. Au fur et à mesure que le train se poursuit, la distance cible diminuera. À mesure que le train approche de la restriction de la vitesse, la vitesse autorisée commencera à diminuer, se retrouvant à la vitesse cible à la restriction. À ce stade, l’écran passera à la prochaine cible.
Le système LZB traite un signal rouge ou le début d’un bloc contenant un train comme une restriction de vitesse de 0 vitesse. Le conducteur verra la même séquence que l’approche d’une restriction de vitesse, sauf que la vitesse cible est de 0.
LZB comprend une protection automatique des trains. Si le conducteur dépasse la vitesse autorisée plus une marge LZB activera le buzzer et une lumière de survitesse. Si le conducteur ne ralentit pas le train, le système LZB peut appliquer les freins lui-même, ce qui a arrêté le train si nécessaire.
LZB comprend également un système de fonctionnement automatique connu sous le nom d’AFB (Automatische Fahr- und Bremsteuerung, Contrôle automatique de conduite et de freinage), ce qui permet au conducteur de laisser l’ordinateur conduire le train sur pilote automatique, conduisant automatiquement à la vitesse maximale actuellement autorisée par le LZB. Dans ce mode, le conducteur surveille uniquement le train et regarde des obstacles inattendus sur les pistes.
Enfin, le système de véhicules LZB comprend le système de protection des trains INDUSI (ou PZB) conventionnel pour une utilisation sur des lignes non équipées de LZB.
Histoire [ modifier ]]
Choix de signalisation CAB [ modifier ]]
Dans les années 1960, les chemins de fer allemands voulaient augmenter les vitesses de certaines de leurs voies ferrées. Un problème pour cela est la signalisation. Les signaux allemands sont placés trop près pour permettre aux trains à grande vitesse de s’arrêter entre eux, et les signaux peuvent être difficiles pour les conducteurs de train à voir à grande vitesse.
L’Allemagne utilise des signaux éloignés placés 1 000 m (3 300 pieds) avant le signal principal. Trains avec des freins conventionnels, décélérant à 0,76 m / s 2 (2,5 pieds / s 2 ), peut s’arrêter à 140 km / h (87 mph) à cette distance. Trains avec des freins forts, incluant généralement des freins de voie électromagnétique, décélérant à 1 m / s 2 (3,3 pi / s 2 ) Peut s’arrêter à 160 km / h (99 mph) et sont autorisés à parcourir cette vitesse. Cependant, même avec des freins forts et la même décélération, un train parcourant 200 km / h (120 mph) nécessiterait 1 543 m (5 062 pi) pour s’arrêter, dépassant la distance de signalisation. De plus, comme l’énergie dissipée à une accélération donnée augmente avec la vitesse, des vitesses plus élevées peuvent nécessiter des décélérations plus faibles pour éviter de surchauffer les freins, augmentant encore la distance.
Une possibilité d’augmenter la vitesse serait d’augmenter la distance entre le signal principal et le signal distant. Mais, cela nécessiterait des blocs plus longs, ce qui diminuerait la capacité de ligne pour les trains plus lents. Une autre solution serait d’introduire plusieurs aspects de signalisation. Un train voyageant à 200 km / h (120 mph) verrait un signal “lent à 160” dans le premier bloc, puis un signal d’arrêt dans le 2e bloc.
L’introduction de la signalisation multi-aspects nécessiterait un remaniement substantiel pour les lignes existantes, car des signaux éloignés supplémentaires devraient être ajoutés sur de longs blocs et les signaux retravaillés sur les signaux plus courts. De plus, cela ne résoudrait pas l’autre problème avec le fonctionnement à grande vitesse, la difficulté de voir les signaux comme un train se précipiter, en particulier dans des conditions marginales telles que la pluie, la neige et le brouillard.
La signalisation de la cabine résout ces problèmes. Pour les lignes existantes, il peut être ajouté au-dessus du système de signalisation existant avec peu, voire pas, de modifications du système existant. Apporter les signaux à l’intérieur de la cabine permet au conducteur de les voir facilement. En plus de ceux-ci, le système de signalisation de la cabine LZB présente d’autres avantages:
- Le conducteur est immédiatement conscient des changements de signalisation.
- Cela permet à un conducteur d’arrêter de ralentir si un signal à la fin d’un bloc s’améliore, économiser de l’énergie et du temps.
- Il permet également au centre de contrôle de signaler instantanément l’arrêt dans le cas de conditions dangereuses telles qu’un déraillement ou une avalanche.
- Le conducteur peut “voir” une longue distance (jusqu’à 13 km) sur la piste, leur permettant de conduire le train plus en douceur.
- Un train suivant un train plus lent peut “voir” le train plus lent bien à l’avance, en train de rouler ou d’utiliser un freinage régénératif pour ralentir et ainsi économiser de l’énergie.
- Il peut signaler une variété de vitesses. (Les signaux allemands conventionnels dans les années 1960 ne pouvaient signaler que 40 ou 60 km / h (25 ou 37 mph) pour les accidents. )
- Il permet de diviser la piste en un grand nombre de petits blocs si nécessaire pour augmenter la capacité.
- Il permet un système de protection automatique de train plus compétent.
- Il permet le système de fonctionnement automatique AFB.
Compte tenu de tous ces avantages, dans les années 1960, les chemins de fer allemands ont choisi de suivre la signalisation de la cabine LZB au lieu d’augmenter l’espacement du signal ou d’ajouter des aspects.
Développement [ modifier ]]
Le premier système de prototypes a été développé par des chemins de fer fédéraux allemands en collaboration avec Siemens et testés en 1963. Il a été installé dans les locomotives de classe 103 et présenté en 1965 avec 200 km / h (120 mph) des trains pour l’exposition internationale à Munich. De ce Siemens a développé le système LZB 100 et l’a introduit sur les lignes de Munich-Augsburg-Donauwörth et Hanover-Celle-Euelzen, toutes dans les locomotives de classe 103. [5] Le système a été superposé sur le système de signal existant. Tous les trains obéiraient aux signaux standard, mais les trains équipés de LZB pourraient fonctionner plus vite que la normale tant que la piste était claire à l’avance sur une distance suffisante. LZB 100 pourrait afficher jusqu’à 5 km (3,1 mi) à l’avance.
Les installations originales étaient toutes logiques câblées. Cependant, alors que les années 1970 progressaient Elektrik Lorenz (SEL) progressive a développé les contrôleurs centraux LZB L72 basés sur ordinateur et en a équipé d’autres lignes.
À la fin des années 1970, avec le développement de microprocesseurs, les 2 ordinateurs sur 3 sur 3 pourraient être appliqués à l’équipement embarqué. Siemens et SEL ont développé conjointement le système embarqué LZB 80 et ont équipé toutes les locomotives et trains qui parcourent plus de 160 km / h (99 mph) plus quelques locomotives de transport intense. En 1991, l’Allemagne a remplacé tout l’équipement LZB 100 par LZB 80 / L 72. [4] [5]
Lorsque l’Allemagne a construit ses lignes à grande vitesse, en commençant par le segment Fulda-Würzburg qui a commencé son fonctionnement en 1988, il a incorporé le LZB dans les lignes. Les lignes ont été divisées en blocs d’environ 1,5 à 2,5 km (0,93 à 1,55 mi) de long, mais au lieu d’avoir un signal pour chaque bloc, il n’y a que des signaux fixes aux commutateurs et aux stations, avec environ 7 km (4,3 mi) entre eux. S’il n’y avait pas de train pour toute la distance, le signal d’entrée serait vert. Si le premier bloc était occupé, il serait rouge comme d’habitude. Sinon, si le premier bloc était gratuit et qu’un train LZB approchait, le signal serait sombre et que le train se poursuivrait uniquement sur les indications LZB.
Le système s’est propagé à d’autres pays. Les Espagnols ont équipé leur première ligne à grande vitesse, opérant à 300 km / h (190 mph), avec LZB. Il a ouvert ses portes en 1992 et relie Madrid, Cordoue et Séville. En 1987, les chemins de fer autrichiens ont introduit le LZB dans leurs systèmes et, avec le changement horaire du 23 mai 1993, ont introduit des trains EuroCity fonctionnant de 200 km / h (120 mph) sur une section longue de 25 km (16 mi) du Westbahn entre Linz et Wels.
Siemens a continué à développer le système, avec “ordinateur intégré de chemin de fer”, ou “Cir Elke”, équipement en ligne en 1999. Cela a permis des blocs plus courts et des restrictions de vitesse pour les commutateurs pour démarrer à l’interrupteur plutôt qu’à une limite de bloc. Voir Cir Elke ci-dessous pour plus de détails.
Calendrier de développement [ modifier ]]
Équipement de ligne [ modifier ]]
Boucles de câble [ modifier ]]

Le centre de contrôle LZB communique avec le train à l’aide de boucles de câbles de conducteur. Les boucles peuvent atteindre 50 mètres de long, comme utilisé à l’entrée et la sortie de la piste contrôlée LZB, ou aussi longtemps que 12,7 km (7,9 mi). Lorsque les boucles sont supérieures à 100 m (328 pieds), elles sont traversées tous les 100 m (328 pieds). Au croisement, l’angle de phase de signal est modifié de 180 °, réduisant l’interférence électrique entre la piste et le train ainsi que le rayonnement à longue distance du signal. Le train détecte cette traversée et l’utilise pour aider à déterminer sa position. Des boucles plus longues sont généralement alimentées à partir du milieu plutôt que d’une fin.
Un inconvénient de très longues boucles est que toute rupture du câble désactivera la transmission LZB pour toute la section, jusqu’à 12,7 km (7,9 mi). Ainsi, les installations LZB plus récentes, y compris toutes les lignes à grande vitesse, divisent les boucles de câble en câbles physiques de 300 m (984 pi). Chaque câble est alimenté à partir d’un répéteur, et tous les câbles d’une section transmettent les mêmes informations.

Centre de route LZB (contrôleur central) [ modifier ]]
Le noyau du centre de route LZB, ou contrôleur central, se compose d’un système informatique 2 sur 3 avec deux ordinateurs connectés aux sorties et un supplément pour la veille. Chaque ordinateur a sa propre alimentation et est dans son propre cadre. [5] Les 3 ordinateurs reçoivent et traitent les entrées et échangent leurs sorties et les résultats intermédiaires importants. Si l’on n’est pas d’accord, il est désactivé et que l’ordinateur de secours prend sa place.
Les ordinateurs sont programmés avec des informations fixes de l’itinéraire telles que les limites de vitesse, les gradients et le
Emplacement des limites, commutateurs et signaux de blocs. Ils sont liés par un LAN ou des câbles au système de verrouillage à partir duquel ils reçoivent des indications de positions de commutation, d’indications de signal et d’occupation du circuit d’essieu ou du compteur d’essieu. Enfin, les ordinateurs du centre de route communique avec des trains contrôlés via les boucles de câble décrites précédemment.
Autre équipement [ modifier ]]


- Répéteur : Les répéteurs connectent des coupes individuelles de boucle de 300 m (984 pi) aux liaisons de communication primaires, renforçant le signal du centre d’itinéraire et envoyant les réponses du véhicule.
- Boucles fixes : Des boucles fixes, généralement d’environ 50 m (164 pi) de long, sont placées aux extrémités de la section contrôlée. Ils transmettent des télégrammes fixes qui permettent aux trains d’entrer pour recevoir une adresse.
- Armoires d’isolement : Une longue liaison de communication consistera en plusieurs câbles individuels connectés dans des “armoires d’isolement” qui servent à empêcher la tension basse fréquence qui est couplée à la caténaire de s’accumuler sur le câble.
- Panneaux : Les signes indiquent les limites du bloc LZB (sinon à un signal) et l’entrée et la sortie de la zone contrôlée LZB.
Équipement de véhicules [ modifier ]]

L’équipement de véhicule dans le LZB80 conçu d’origine consistait en: [5]
- Des ordinateurs : L’équipement embarqué était centré sur un système informatique de 2 sur 3. La conception LZB 80 d’origine a utilisé 8085 microprocesseurs programmés en langage d’assemblage. Les programmes ont été pilotés par l’interruption, avec des interruptions générées par une horloge de 70 ms, les récepteurs et émetteurs de piste, l’interface série, et également dans le programme lui-même. Les interruptions ont déclenché des programmes de comparaison et de sortie. L’équipement périphérique a été disposé autour des ordinateurs avec toutes les interfaces séparées électriquement et tous les terrains attachés au cadre de l’armoire qui était attaché au châssis du véhicule.
- Alimentation redondante : Les ordinateurs et l’équipement périphérique ont été fournis avec une alimentation redondante basée sur deux transformateurs de tension identiques. Chacun était capable de fournir la puissance nécessaire à tout l’équipement. Ils étaient normalement alternativement changés, mais si l’un échouait, l’autre prendrait le relais. Les batteries embarquées peuvent également fournir une puissance temporaire.
- Odométrie : La vitesse du véhicule et la distance parcourue sont mesurées sur deux canaux indépendants par deux générateurs d’impulsions montés sur différents essieux. Chacun est lié à une unité basée sur un micro-contrôleur distincte utilisée pour corriger les inexactitudes. La logique centrale interroge les deux unités ainsi qu’un accéléromètre compare les valeurs et vérifie la plausibilité.
- Destinataire : Deux paires d’antennes de réception sont chacune alimentées à des amplificateurs sélectifs et autorégulés dont la sortie est transférée à un démodulateur puis un transformateur parallèle en série. Les télégrammes reçus sont ensuite alimentés par octet par octet vers l’ordinateur logique central. Les récepteurs indiquent également des points de transition et si le signal est présent.
- Émetteur : Le 2 Out Post Ordinters alimente les transformateurs parallèles à la série. Ils sont comparés après la conversion, et la transmission n’est autorisée que s’ils sont identiques. Un seul signal est en fait transmis, l’émetteur transmettant les deux signaux à 56 kHz avec les signaux déplacés par un angle de phase de 90 °.
- Connexion de frein d’urgence : Les ordinateurs sont connectés au frein via un relais. Une commande ou une perte de courant de l’ordinateur libérera l’air du tuyau de frein appliquant le frein d’urgence.
- Connexion de la corne induci : Le klaxon signalant le conducteur est également connecté par un relais.
- Interface série : Une interface série est utilisée pour connecter le reste des composants, y compris les entrées du pilote, l’unité d’affichage, l’enregistreur et la commande automatique du lecteur et du frein (AFB) aux ordinateurs. Les télégrammes sont transmis cycliquement à la fois des ordinateurs et des ordinateurs.
- Unité d’entrée du conducteur : Le conducteur saisit des données liées au train telles que le type de freinage (passager / fret), le potentiel de freinage, la vitesse maximale du train et la longueur du train sur l’unité d’interface du conducteur. Ceci est ensuite affiché au pilote pour vérifier qu’il est correct.
- Affichage de la cabine modulaire (MFA) : L’affichage de la cabine modulaire affiche les vitesses et distances pertinentes au pilote comme décrit dans l’aperçu.
- Contrôle automatique du lecteur / des freins : Lorsqu’il est activé par le conducteur, l’unité de contrôle automatique du lecteur / frein (AFB) conduira le train après la vitesse autorisée. Lorsqu’il ne fonctionne pas sur une ligne équipée LZB, c’est-à-dire en vertu de l’opération Indus, l’AFB agit principalement comme un “régulateur de vitesse”, conduisant en fonction de la vitesse fixée par le conducteur.
L’équipement dans les trains plus récents est similaire, bien que les détails puissent varier. Par exemple, certains véhicules utilisent un radar plutôt que des accéléromètres pour aider à leur odométrie. Le nombre d’antennes peut varier selon le véhicule. Enfin, certains véhicules plus récents utilisent un affichage “Interface man-machine” généré par ordinateur complet (MMI) plutôt que les cadrans séparés de “l’affichage de la cabine modulaire” (MFA).
Opération [ modifier ]]
Télégrammes [ modifier ]]
LZB fonctionne en échangeant des télégrammes entre le contrôleur central et les trains. Le contrôleur central transmet un “télégramme d’appel” en utilisant la signalisation de keying (FSK) de décalage de fréquence (FSK) à 1200 bits par seconde sur 36 kHz ± 0,4 kHz. Le train répond avec un “télégramme de réponse” à 600 bits par seconde à 56 kHz ± 0,2 kHz. [7]
Appel au format télégramme [ modifier ]]
Les télégrammes d’appel mesurent 83,5 bits:
- Séquence de démarrage: Synchronisation: 5,5 bits, élément de démarrage + Code de boulanger: 3 bits
- Adresse: Section ID: A-E, A1-A3, Lieu: 1-127 ou 255-128
- Informations sur le véhicule: Direction de voyage: haut / bas, type de freinage: passager / fret, numéro de frein: 1-10, A-B
- Informations sur le freinage: Distance de la demande de freinage: 0–1 550 m (0–5,085 ft)
- Distance nominale xg: 0–12 775 m (0–41,913 ft), informations cibles, distance: 0–2 700 m (0–8,858 ft), vitesse: 0–320 km / h (0–199 mph)
- Afficher les informations, les informations du signal: 3 bits, informations supplémentaires: 5 bits
- Informations auxiliaires: identité de groupe: 1-4 – indique le type de réponse requis, identité de ligne: nouvelles lignes principales à haute vitesse / normale, type de contrôleur central: LZB 100/72
- Vérification de la redondance cyclique (CRC): 8 bits
On peut noter qu’il n’y a pas de champ “Identification du train” dans le télégramme. Au lieu de cela, un train est identifié par position. Voir les zones et l’adresse pour plus de détails.
Format de télégramme de réponse [ modifier ]]
Il existe 4 types de télégrammes de réponse, chacun de 41 bits de long. Le type exact de télégramme qu’un train envoie dépend de “l’identité de groupe” dans le télégramme d’appel.
Le type de télégramme le plus courant est le type 1, qui est utilisé pour signaler la position et la vitesse d’un train vers le contrôleur central. Il contient les champs suivants: {LZB P3}
- Synchronisation et séquence de démarrage: 6 bits
- Identité de groupe: 1-4 – indique le type de réponse
- Remerciement de l’emplacement du véhicule: Nombre de zones avancées = ± 0, ± 1, ± 2
- Emplacement dans la zone: 0–87,5 m (0–287 pi) (par incréments de 12,5 m ou 41 pi)
- Type de freinage: passager / fret
- Numéro de courbe de frein: 16 courbes de frein possible
- Vitesse réelle: 0–320 km / h (0–199 mph)
- Informations opérationnelles et diagnostiques: 5 bits
- Vérification de la redondance cyclique (CRC): 7 bits
Les autres télégrammes sont utilisés principalement lorsqu’un train entre dans la section contrôlée par LZB. Ils commencent tous par la même séquence de synchronisation et de démarrage et une “identité de groupe” pour identifier le type de télégramme, et se terminer avec le CRC. Leurs champs de données varient comme suit:
- Type 2: Remerciement de l’emplacement du véhicule, emplacement dans la zone, type de freinage, numéro de courbe de frein, vitesse maximale du train, longueur de train
- Type 3: chemin de fer, numéro de train
- Type 4: Locomotive / Train Series, numéro de série, longueur de train
Entrée dans le LZB, zones et adressage [ modifier ]]
Avant d’entrer dans une section contrôlée par LZB, le conducteur doit activer le train en entrant les informations requises sur l’unité d’entrée du pilote et en activant LZB. Lorsqu’il est activé, le train allumera une lumière “B”.

Une section contrôlée de piste est divisée en jusqu’à 127 zones, chacune de 100 m (328 pi) de long. Les zones sont numérotées consécutivement, en comptant à partir de 1 dans une direction et en baisse de 255 dans le contraire.
Lorsqu’un train entre dans une section contrôlée par LZB de la piste, il passera normalement sur une boucle fixe qui transmet un télégramme de “changement d’identification de section” (BKW). Ce télégramme indique dans le train le numéro d’identification de la section ainsi que la zone de départ, soit 1 ou 255. Le train renvoie un télégramme de reconnaissance. À cette époque, les indications LZB sont activées, y compris la lumière “ü” pour indiquer que le LZB est en cours d’exécution.
À partir de ce moment, l’emplacement du train est utilisé pour identifier un train. Lorsqu’un train entre dans une nouvelle zone, il envoie un télégramme de réponse avec le «Recordage de l’emplacement du véhicule», indiquant qu’il s’est avancé dans une nouvelle zone. Le contrôleur central utilisera ensuite la nouvelle zone lors de la lutte contre le train à l’avenir. Ainsi, une adresse de trains augmentera ou diminuera progressivement, selon sa direction, alors qu’elle se déplace le long de la piste. Un train identifie qu’il est entré dans une nouvelle zone en détectant le point de transposition du câble dans le câble ou lorsqu’il a parcouru 100 mètres (328 pieds). [5] Un train peut manquer de détecter jusqu’à 3 points de transposition et toujours sous le contrôle de LZB.
La procédure de saisie de la piste contrôlée LZB est répétée lorsqu’un train passe d’une section contrôlée à une autre. Le train reçoit un nouveau télégramme “changement d’identification de section” et obtient une nouvelle adresse.
Jusqu’à ce que le train connaisse son adresse, il ignorera les télégrammes reçus. Ainsi, si un train n’entre pas correctement dans la section contrôlée, elle ne sera pas sous le contrôle de LZB avant la section suivante.
Signalisation de vitesse [ modifier ]]
La tâche principale de LZB est de signaler au train la vitesse et la distance qu’elle est autorisée à parcourir. Il le fait en transmettant des télégrammes d’appels périodiques à chaque train une à cinq fois par seconde, selon le nombre de trains présents. Quatre champs dans l’appel Telegram sont particulièrement pertinents:
- Distance cible.
- Vitesse cible.
- Distance d’arrêt nominale, connue sous le nom de “XG” (voir ci-dessous).
- Distance du point de demande de freinage.
La vitesse et l’emplacement cibles sont utilisés pour afficher la vitesse et la distance cibles du conducteur. La vitesse autorisée du train est calculée à l’aide de la courbe de freinage des trains, qui peut varier selon le type de train, et l’emplacement XG, qui est la distance entre le début de la zone de 100 m (328 pi) qui est utilisée pour s’adresser au train. Si le train s’approche d’un signal rouge ou du début d’un bloc occupé, l’emplacement correspondra à l’emplacement du signal ou de la limite de bloc. L’équipement embarqué calculera la vitesse autorisée à tout moment afin que le train, décélérant à la décélération indiquée par sa courbe de freinage, s’arrête au point d’arrêt.
Un train aura une courbe de freinage parabolique comme suit:

où:
- Décel = décélération
- Dist = distance du début de la zone de 100 m (328 pi)
Lorsqu’un train s’approche d’une restriction de vitesse, le centre de contrôle transmettra un paquet avec un emplacement XG réglé sur un point derrière la restriction de vitesse de telle sorte qu’un train, décélérant en fonction de sa courbe de freinage, arrivera à la vitesse correcte au début de la Restriction de vitesse. Ceci, ainsi que la décélération à zéro vitesse, sont illustrés avec la ligne verte de la figure “Calcul de vitesse autorisée et supervisée”.

La ligne rouge sur la figure montre la “vitesse de surveillance”, qui est la vitesse qui, si elle est dépassée, le train appliquera automatiquement les freins d’urgence. Lorsqu’il fonctionne à vitesse constante, il est de 8,75 km / h (5,44 mph) au-dessus de la vitesse autorisée pour le freinage d’urgence transité (jusqu’à ce que la vitesse soit réduite) ou 13,75 km / h (8,54 mph) au-dessus de la vitesse autorisée pour le freinage d’urgence continu. Lorsque vous approchez d’un point d’arrêt, la vitesse de surveillance suit une courbe de freinage similaire à la vitesse autorisée, mais avec une décélération plus élevée, cela le mettra à zéro au point d’arrêt. Lors de l’approche d’une restriction de vitesse, la courbe de freinage de vitesse de surveillance coupe le point de restriction de vitesse à 8,75 km / h (5,44 mph) au-dessus de la vitesse constante.
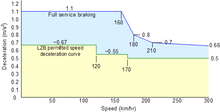
Les taux de décélération sont plus conservateurs avec le LZB qu’avec la signalisation allemande conventionnelle. Une courbe de freinage de train de passagers typique peut avoir une décélération “vitesse autorisée” de 0,5 m / s 2 (1,6 pi / s 2 ) et une décélération de “vitesse de surveillance” de 0,71 m / s 2 (2,3 pi / s 2 ) 42% plus élevé que la décélération pour la vitesse autorisée, mais inférieure aux 0,76 m / s 2 (2,5 pieds / s 2 ) requis pour s’arrêter à 140 km / h (87 mph) dans 1 000 m (3 281 pieds) utilisés dans la signalisation conventionnelle. Le Ice3, qui a une décélération de freinage à service complet de 1,1 m / s 2 (3,6 pieds / s 2 ) en dessous de 160 km / h (99 mph), tombant à 0,65 m / s 2 (2,1 ft / s 2 ) de 300 km / h (190 mph), a une décélération de vitesse cible LZB de seulement 0,68 m / s 2 (2,2 pi / s 2 ) à 120 km / h (75 mph), 0,55 m / s 2 (1,8 pi / s 2 ) entre 120 et 170 km / h (75 et 106 mph) et 0,5 m / s 2 (1,6 pi / s 2 ) à des vitesses plus élevées. [8]
Entre la vitesse autorisée et la vitesse de surveillance se trouve une vitesse d’avertissement, normalement 5 km / h (3,1 mph) au-dessus de la vitesse autorisée. Si le train dépasse cette vitesse LZB flashera la lumière “G” sur l’affichage du train et sonnera une corne.
Quitter LZB [ modifier ]]
Environ 1 700 m (5 577 pieds) avant la fin de la section contrôlée LZB, le contrôleur central enverra un télégramme pour annoncer la fin du contrôle LZB. Le train flashera la lumière “ende” que le conducteur doit reconnaître dans les 10 secondes. L’affichage donnera normalement la distance et la vitesse cible à la fin de la section contrôlée, qui dépendra du signal à ce point.
Lorsque le train atteint la fin du contrôle LZB, les lumières “ü” et “ende” s’éteignent et le système induti conventionnel (ou PZB) prend en charge la protection automatique des trains.
Modes de fonctionnement spéciaux [ modifier ]]
Des conditions spéciales non couvertes par le système LZB complet ou les échecs peuvent mettre LZB dans l’un des modes de fonctionnement spéciaux.
Crossover sur piste opposée [ modifier ]]
Au fur et à mesure qu’un train s’approche d’un crossover vers une piste de direction normalement opposée, l’écran flashera la lumière “E / 40”. Le conducteur confirme l’indication et la vitesse autorisée baisse suivant la courbe de freinage à 40 km / h (25 mph). Lorsque la section du croisement est atteinte, les écrans sont désactivés et le conducteur peut passer par le croisement à 40 km / h (25 mph).
Conduire par signal de vue [ modifier ]]
Les systèmes de signalisation allemands ont un signal de “drive par vue” qui se compose de 3 lumières blanches formant un triangle avec une lumière en haut. Ce signal, étiqueté “ZS 101”, est placé avec un signal latéral fixe et, lorsqu’il est éclairé, le conducteur passe un signal rouge ou défectueux fixe et conduit par vue jusqu’à l’extrémité de l’entrairement plus rapide que 40 km / h (25 mph).
Lorsque vous approchez un tel signal dans le territoire LZB, la lumière “E / 40” sera allumée jusqu’à 250 m (820 pi) avant le signal, alors le “E / 40” deviendra sombre et “V40” clignote. Le signal “V40” indique la capacité de conduire à vue.
Panne de transmission [ modifier ]]
Si l’échange de données est interrompu, le système de mesure de distance des trains échoue ou le train ne détecte pas 4 points de transposition de câble ou plus que le système LZB ira dans un état de défaillance. Il allumera l’indicateur “stör” puis flashera “ü”. Le conducteur doit reconnaître les indications dans les 10 secondes. Le conducteur doit ralentir le train à pas plus de 85 km / h (53 mph) ou plus bas; La vitesse exacte dépend du système de signalisation de sauvegarde en place.
Extensions [ modifier ]]
Cir elk-i [ modifier ]]
Cir-Elke est une amélioration par rapport au système LZB de base. Il utilise la même interface physique et les mêmes paquets que LZB standard mais améliore son logiciel, en ajoutant des capacités et en modifiant certaines procédures. Il est conçu pour augmenter la capacité de ligne jusqu’à 40% et pour raccourcir davantage les temps de trajet. Le nom est une abréviation du titre du projet anglais / allemand C computer je ntegré R ailroading – ET Cracons du L Capacité de repos dans K Ernnetz der ET isenbahn (Chemin de fer intégré informatique – augmentation de la capacité du réseau ferroviaire de base). Étant une extension de LZB, il est également appelé LZB-Cir-Elke abrégé en LZB-CE.
Cir-Elke comprend les améliorations suivantes:
- Blocs plus courts – Les blocs Cir-Elke peuvent être aussi courts que 300 mètres (984 pi), ou même plus courts pour les systèmes S-Bahn. Le système Munich S-Bahn a des blocs aussi courts que 50 mètres (164 pieds) au début de la plate-forme, permettant à un train de s’arrêter dans la plate-forme alors qu’un autre part et le rend capable de courir 30 trains par heure.
- Changements de vitesse à n’importe quel endroit – Le système LZB standard nécessitait que les restrictions de vitesse commencent à des limites de bloc. Avec CIR-Elke, les restrictions peuvent commencer à tout moment, comme lors d’une participation. Cela signifie qu’un train n’a pas à ralentir dès le début, augmentant les vitesses moyennes.
- Modifications d’évaluation du télégramme – Afin d’augmenter la sécurité sur un système avec des intervalles plus courts entre les trains, Cir-Elke envoie deux fois des télégrammes identiques. Le train n’agira sur un télégramme que s’il reçoit deux télégrammes valides identiques. Afin de compenser l’augmentation du nombre de télégrammes, le CIR-Elke envoie moins fréquemment des télégrammes dans des trains sans déplacement.
Cir Elk-II [ modifier ]]
Le système LZB d’origine a été conçu pour des vitesses autorisées jusqu’à 280 km / h (170 mph) et des gradients jusqu’à 1,25%. La ligne ferroviaire à haute vitesse Cologne – Frankfurt a été conçue pour une opération de 300 km / h (190 mph) et a des gradients de 4%; Ainsi, il avait besoin d’une nouvelle version de LZB, et Cir Elke-II a été développé pour cette ligne.
Cir Elke-II a les caractéristiques suivantes:
- Vitesse maximale de 300 km / h (190 mph).
- Soutien aux courbes de freinage avec des décélérations et des courbes plus élevées en tenant compte du profil d’altitude réel de la distance à venir au lieu de supposer la pente maximale de la section. Cela rend le fonctionnement sur 4% de gradients pratiques.
- Prise en charge des distances cibles allant jusqu’à 35 000 m (114 829 pi) à un point d’arrêt ou de restriction de vitesse. S’il n’y a pas de tel point sur cette distance, le système affichera une distance cible de 13 000 m (42 651 ft) et une vitesse cible de la vitesse de ligne.
- Prise en charge de l’activation du frein actuel des iddy des trains ICE3. Par défaut, le frein à courant d’EDDY est activé uniquement pour le freinage d’urgence. Avec CE2, il est également possible de l’activer pour le freinage de service.
- Tension de signalisation ou changements de phase.
- Des signaux d’avertissement audibles 8 secondes avant le point de freinage, ou 4 secondes pour le Munich S-Bahn, au lieu de 1 000 m (3 281 pieds) avant ou avec une différence de vitesse de 30 km / h (19 mph) effectuée précédemment.
Dysfonctionnement [ modifier ]]
Le système LZB a été assez sûr et fiable; À tel point qu’il n’y a eu aucune collision sur les lignes équipées de LZB en raison de la défaillance du système LZB. Cependant, il y a eu des dysfonctionnements qui auraient pu potentiellement entraîner des accidents. Ils sont:
- Le 29 juin 1991, après une perturbation, le conducteur du train a fait retirer le système LZB et a passé un signal d’arrêt avec deux trains dans le tunnel de Jühnde sur la ligne à grande vitesse de Hanover-Würzburg.
- Le 29 juin 2001, il y a eu presque un grave accident au crossover Oschatz sur la ligne de chemin de fer Leipzig-Dresde. Le croisement a été réglé sur divergence avec une limite de vitesse de 100 km / h (62 mph), mais le système LZB a affiché une limite de 180 km / h (112 mph). Le conducteur de Ice 1652 a reconnu le signal divergent et a réussi à ralentir à 170 km / h (106 mph) avant le passage à niveau et le train ne déraille pas. Une erreur logicielle dans l’ordinateur LZB a été suspectée comme cause.
- Un proche accidentel s’est produit le 17 novembre 2001 à Bienenbüttel sur la ligne ferroviaire de Hambourg-Hanover. Afin de passer un train de fret défaillant, un train de glace s’est croisé jusqu’à la piste opposée en allant 185 km / h (115 mph) à travers un croisement qui a été évalué à 80 km / h (50 mph). La cause suspectée a été l’exécution défectueuse d’un changement au système de verrouillage où la vitesse de croisement est passée de 60 à 80 km / h (37 à 50 mph). Sans cette restriction de vitesse, le système LZB a continué à afficher la vitesse de ligne de passage de 200 km / h (120 mph) sur l’affichage dans la cabine – le conducteur de train a appliqué les freins sur la reconnaissance des lumières de signal côté ligne réglées pour diverger et diverger et Le train n’a pas déraillé.
- Le 9 avril 2002 sur la ligne de train à grande vitesse Hanover-Berlin, un défaut dans l’ordinateur de centre de la ligne LZB a amené quatre trains contrôlés par LZB à un arrêt avec deux trains dans chaque ligne de ligne interrompue dans le même bloc de signalisation (bloc de Teilblockmodus – bloc divisé contrôle). Lorsque l’ordinateur a été redémarré, il a signalé 0 km / h (0 mph) aux trains devant et 160 km / h (99 mph) aux trains suivants. Les conducteurs des trains suivants n’ont cependant pas continué – un conducteur a vu le train devant lui et l’autre conducteur à double recouvrement avec le centre d’opérations qui l’avait averti avant le départ, de sorte que deux collisions possibles ont été évitées. À la suite de cet incident, les deux opérateurs de train principaux (DB Cargo et DB Passenger Transport) ont donné une instruction à leurs chauffeurs pour être particulièrement prudente pendant les périodes de panne de LZB lorsque le système fonctionne en mode bloc divisé. La cause s’est avérée être une erreur logicielle.
Lignes équipées [ modifier ]]
DB (Allemagne) [ modifier ]]

Les lignes suivantes de Deutsche Bahn sont équipés de LZB, permettant des vitesses supérieures à 160 km / h (offrant l’aptitude générale de la piste):
Note: italique Indiquez l’emplacement physique d’un centre de contrôle LZB.
Öbb (Autriche) [ modifier ]]
Le West Railway (Vienne – Salzburg) est équipé de LZB en trois sections:
Renfe (Espagne) [ modifier ]]
Royaume-Uni [ modifier ]]
Une version modifiée de LZB est installée sur la ligne principale de Chiltern sous le nom de Chiltern ATP. [9]
Utilisations non-mainline [ modifier ]]
En plus des chemins de fer principaux, des versions du système LZB sont également utilisées dans les chemins de fer et les métros de banlieue (S-BAHN).
Dusseldorf, Duisburg, Krefeld, Mülheim an der Ruhr [ modifier ]]
Les tunnels dans les systèmes de Düsseldorf et Duisburg Stadtbahn (tramway) et certains tunnels des Essen Stadtbahn autour de la région de Mülheim et der Ruhr sont équipés de LZB.
Vienne (Vienne) [ modifier ]]
À l’exception de la ligne 6, toute la Vienne U-Bahn est équipée de LZB car elle a été construite pour la première fois et comprend la capacité de conduite automatique avec l’opérateur surveillant le train.
Munich [ modifier ]]
Le Munich U-Bahn a été construit avec LZB Control. Pendant les opérations de jour régulières, les trains sont automatiquement motivés avec l’opérateur qui commence simplement le train. Les signaux stationnaires restent sombres pendant cette période.
Le soir à partir de 21h00 Jusqu’à la fin du service et le dimanche, les opérateurs conduisent les trains manuellement selon les signaux stationnaires afin de rester en pratique. Il est prévu d’automatiser le placement et l’inversion des trains vides.
Le Munich S-Bahn utilise LZB sur sa section de tunnel principal principal (StammStrecke).
Nuremberg [ modifier ]]
La ligne U3 U-Bahn U3 Nuremberg utilise LZB pour une opération entièrement automatique (sans conducteur). Le système a été développé conjointement par Siemens et Vag Nuremberg et est le premier système où les trains sans conducteur et les trains conventionnels partagent une section de ligne. Les trains de ligne U2 conventionnellement existants partagent un segment avec les trains automatiques de ligne U3. Actuellement, un employé accompagne toujours les trains automatiquement motivés, mais plus tard, les trains se rendront non accompagnés.
Après plusieurs années de retards, le dernier essai de trois mois a été achevé avec succès le 20 avril 2008 et la licence d’exploitation accordée le 30 avril 2008. Quelques jours plus tard, les trains sans conducteur ont commencé à fonctionner avec des passagers, d’abord le dimanche et le public Vacances, puis en semaine aux heures de pointe, et enfin après l’heure de pointe du matin qui a une séquence serrée de trains U2. La cérémonie d’ouverture officielle de la ligne U3 a eu lieu le 14 juin 2008 en présence du Premier ministre bavarois et ministre fédéral des Transports, l’opération régulière a commencé avec le changement du calendrier le 15 juin 2008. Le Nuremberg U-Bahn prévoit de convertir U2 au fonctionnement automatique dans environ un an.
Londres [ modifier ]]
Le Docklands Light Railway dans East London utilise la technologie Seltrac qui a été dérivée de LZB pour diriger des trains automatisés. Les trains sont accompagnés d’un employé qui ferme les portes et signale le train pour commencer, mais qui est ensuite principalement dédié au service client et au contrôle des billets. En cas d’échec, le train peut être conduit manuellement par le personnel du train.
Voir également [ modifier ]]
Les références [ modifier ]]
- ^ “Liste des systèmes de classe B” (PDF, 234 Ko) . Agence de l’Union européenne pour les chemins de fer . 2016-06-01 . Récupéré 2017-04-04 .
- ^ “Nouvelle approche pour les unités ETCS à bord en fonction des principes open source” (PDF; 553 Mo) . UIC, l’organisation ferroviaire mondiale . 2011-03-01 . Récupéré 2017-04-04 .
- ^ “Mise en œuvre du système européen de contrôle des trains, etc. – Opportunités pour les couloirs ferroviaires européens” (PDF) . UIC, l’organisation ferroviaire mondiale . 2003-12-31. Archivé de l’original (PDF; 1,6 Mo) le 2014-04-21 . Récupéré 2017-04-04 .
- ^ un b Système de signalisation pour les lignes allemandes à grande vitesse, par H. Uebel, Standard Elektrik Lorenz A.G., Stuttgart, Allemagne, présentée dans la “Conférence internationale de 1989 sur l’électrification ferroviaire de la ligne principale”, p 36-39.
- ^ un b c d C’est Contrôle automatique de train automatique et signalisation de cabine avec le LZB 80, par H. Sporleder, Siemens, AG, publié dans le
“1989 Conférence internationale sur l’électrification ferroviaire de ligne principale”, p 40-46. - ^ La glace – un produit du réseau System Network .
Dans: Deutsche Bahn Ag: ( http://www.db.de/site/shared/deiannhaenge/publikationen__broschueren/bahtech/bahntech2001.pdf ) Bahntech , Nr. 1/06], S. 24 f. - ^ Directive 96/48 / EC, interopérabilité du trans-européen
Système ferroviaire à grande vitesse, projet de spécification technique pour l’interopérabilité,
Partie 3, annexes au TSI, “Control Command and Signaling” Sub-System,
19.05.2006. - ^ “Le frein linéaire à courant de tourbillon de la glace 3”
par le Dr-ing. Wolf-Dieter Meler-Credner et Dipl.-ing. Johannes Gräber,
Publié dans Railway Technical Review (RTR), avril 2003 - ^ “Chiltern ATP obsolescence | ingénieur ferroviaire” . 16 octobre 2020 . Récupéré 2021-08-21 .
Recent Comments