MEMS MAGNETIE ACTUATEUR – Wikipedia wiki
Un article de Wikipédia, l’encyclopédie libre
UN Actionneur magnétique mems est un appareil qui utilise les systèmes microélectromécaniques (MEMS) pour convertir un courant électrique en une sortie mécanique en utilisant l’équation de force de Lorentz bien connue ou la théorie du magnétisme.
Aperçu des MEM [ modifier ]]
Technologie du système micro-électro-mécanique (MEMS) [d’abord] est une technologie de processus dans laquelle les dispositifs ou structures mécaniques et électro-mécaniques sont construits à l’aide de techniques de micro-fabrication spéciales. Ces techniques comprennent: la micro-machinement en vrac, la micro-machinement de surface, la liga, la liaison de la plaquette, etc.

Un appareil est considéré comme un appareil MEMS s’il satisfait les éléments suivants:
- Si sa taille de caractéristique se situe entre 0,1 µm et des centaines de micromètres. (Au-dessous de cette plage, il devient un appareil nano et au-dessus de la plage, il est considéré comme un mésosystème)
- S’il a des fonctionnalités électriques dans son fonctionnement. Cela pourrait inclure la génération de tension par induction électromagnétique, en modifiant l’écart entre 2 électrodes ou par un matériau piézoélectrique.
- Si le dispositif a des fonctionnalités mécaniques telles que la déformation d’un faisceau ou d’un diaphragme due à la contrainte ou à la déformation.
- S’il a une fonctionnalité de type système. L’appareil doit être intégrable à d’autres circuits pour former un système. Ce serait le circuit d’interfaçage et l’emballage pour que l’appareil devienne utile.
Pour l’analyse de chaque dispositif MEMS, l’hypothèse regroupée est faite: que si la taille de l’appareil est bien inférieure à l’échelle de longueur caractéristique du phénomène (vague ou diffusion), il n’y aurait pas de variations spatiales sur l’ensemble de l’appareil. La modélisation devient facile en vertu de cette hypothèse. [2]

Opérations dans MEMS [ modifier ]]
Les trois principales opérations de MEMS sont:
- Détection: mesurer une entrée mécanique en la convertissant en un signal électrique, par ex. Un accéléromètre MEMS ou un capteur de pression (pourrait également mesurer les signaux électriques comme dans le cas des capteurs de courant)
- Agtuation: en utilisant un signal électrique pour provoquer le déplacement (ou la rotation) d’une structure mécanique, par ex. un actionneur de jet synthétique.
- Génération d’énergie: génère de la puissance à partir d’une entrée mécanique, par ex. MEMS Energy Harvesters
Ces trois opérations nécessitent une certaine forme de schémas de transduction, les plus populaires étant: le piézoélectrique, l’électrostatique, le piézorésistance, l’électrodynamique, le magnétique et le magnétostrictif. Les actionneurs magnétiques MEMS utilisent les trois derniers schémas pour leur fonctionnement.
Actionnement magnétique [ modifier ]]
Le principe de l’actionnement magnétique est basé sur l’équation de la force de Lorentz.

Lorsqu’un conducteur de courant de courant est placé dans un champ magnétique statique, le champ produit autour du conducteur interagit avec le champ statique pour produire une force. Cette force peut être utilisée pour provoquer le déplacement d’une structure mécanique.

Régir les équations et les paramètres [ modifier ]]
Un actionneur MEMS typique est illustré à droite. Pour un seul tour de bobine circulaire, les équations qui régissent son opération sont: [3]
- Le champ H d’un conducteur circulaire:

- La force produite par l’interaction des densités de flux:

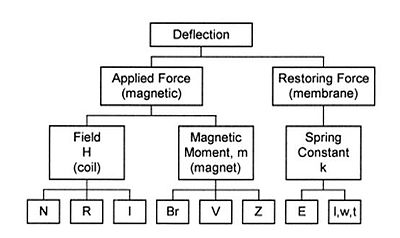
La déviation d’une structure mécanique pour l’actionnement dépend de certains paramètres de l’appareil. Pour l’actionnement, il doit y avoir une force appliquée et une force de restauration. La force appliquée est la force représentée par l’équation ci-dessus, tandis que la force de restauration est fixée par la constante de ressort de la structure mobile.
La force appliquée dépend à la fois du champ des bobines et de l’aimant. La valeur de rémanence de l’aimant, [4] Son volume et sa position des bobines contribuent tous à son effet sur la force appliquée. Alors que le nombre de virages de bobine, sa taille (rayon) et la quantité de courant le traversant déterminent son effet sur la force appliquée. La constante de ressort dépend du module des jeunes de la structure mobile et de sa longueur, de sa largeur et de son épaisseur.
Actionneurs magnétostrictifs [ modifier ]]
L’actionnement magnétique ne se limite pas à l’utilisation de la force de Lorentz pour provoquer un déplacement mécanique. Les actionneurs magnétostrictifs peuvent également utiliser la théorie du magnétisme pour provoquer le déplacement. Les matériaux qui modifient leurs formes lorsqu’ils sont exposés aux champs magnétiques peuvent désormais être utilisés pour entraîner des moteurs et actionneurs linéaires à fiabilité élevée.
Un exemple est une tige de nickel qui a tendance à se déformer lorsqu’elle est placée dans un champ magnétique externe. Un autre exemple consiste à enrouler une série de bobines d’induction électromagnétiques autour d’un tube métallique dans lequel un matériau terfenol-d est placé. Les bobines génèrent un champ magnétique mobile qui couronne les enroulements successifs le long du tube du stator. Alors que le champ magnétique itinérant provoque chaque section transversale suivant de Terfenol-D à s’allonger, puis se contracte lorsque le champ est retiré, la tige “rampera” dans le tube du stator comme un ver de pouce. Des ondes de propagation répétées de flux magnétique traduiront la tige sur la longueur du tube, produisant une course et une force de force utiles. La quantité de mouvement générée par le matériau est proportionnelle au champ magnétique fourni par le système de bobine, qui est fonction du courant électrique. Ce type de dispositif de motif, qui dispose d’une seule pièce en mouvement, est appelé moteur linéaire à onde élastique ou péristaltique. (voir: Vidéo d’un micro-Walker magnétostrictif )
Avantages des actionneurs magnétiques [ modifier ]]
- Force d’actionnement élevée et accident vasculaire cérébral (déplacement)
- Transduction directe et entièrement linéaire (dans le cas de l’actionnement électrodynamique)
- Actionnement bidirectionnel
- Actionnement à distance sans contact
- Actionnement à basse tension
- Un chiffre de mérite pour les actionneurs est la densité d’énergie de champ qui peut être stockée dans l’écart entre le rotor et le stator. L’actionnement magnétique a une densité d’énergie potentiellement élevée [5]
Matériau de l’aimant [ modifier ]]

Le fonctionnement de l’actionneur magnétique dépend de l’interaction entre le champ à partir d’un électroaim et d’un champ statique. Pour produire ce champ statique, il est important d’utiliser le bon matériau. Dans MEMS, les aimants permanents sont devenus le favori car ils ont un très bon facteur de mise à l’échelle et ils conservent leur magnétisation même lorsqu’il n’y a pas de champ externe … ce qui signifie qu’ils n’ont pas besoin d’être magnétisés en continu lorsqu’ils sont utilisés [6] [7] [8] [9] [dix]
Intégrer l’aimant dans l’appareil MEMS [ modifier ]]
Comme discuté précédemment, les appareils MEMS sont conçus et fabriqués à l’aide de techniques de micro-fabrication spéciales. Le principal défi pour les MEMs magnétiques est l’intégration de l’aimant dans le dispositif MEMS. [11] [douzième] Des recherches récentes ont suggéré des solutions à ce défi.
Fabrication (ou moulure) de l’aimant [ modifier ]]
Il existe plusieurs façons par lesquelles l’aimant pourrait être fabriqué sur une structure MEMS:
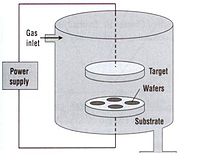
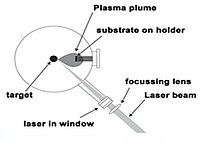
- Pulvérisation: bombardement en argon des particules de libération du matériau du matériau. Principalement pour déposer des aimants en terres rares. Le taux de dépôt et la surface du film dépendent de l’outil de pulvérisation et de la taille de la cible
Problèmes avec l’actionnement magnétique [ modifier ]]
- Dissipation haute puissance. C’est un problème majeur pour les MEM magnétiques, mais des travaux sont en cours pour contourner cela. [16]
- Fabrication de la bobine
- Intégration du micromagnét dans le périphérique MEMS
- Compatibilité des processus
- L’intégrabilité dans le processus global de microfabrication (maintenir le coût et le débit)
- De sorte que les processus préexistants dans la fabrication du dispositif MEMS ne seront pas falsifiés, les températures de dépôt et le traitement / les conditions post-dépose doivent être tolérables. De plus, le micromagnét doit être capable de résister à tout traitement chimique qui viendra après son dépôt
- Problèmes de magnétisation (on peut vouloir avoir plus d’une direction de l’aimantation; cela crée un problème) [17]
Chacun de ces défis peut être atténué ou diminué par le bon choix de matériau, le choix de la méthode de moulage ou de fabrication et le type de dispositif à construire.
Les applications de l’actionneur magnétique comprennent: l’actionneur de jet synthétique, les micro-pompes et les micro-Relays.
Les références [ modifier ]]
- ^ Senturia, Stephen D. (2001). Conception de microsystèmes . ISBN 978-0-7923-7246-2 .
- ^ Arnold, D. (automne 2010 – printemps 2011). Notes de cours sur les transducteurs MEMS .
- ^ Wagner, B.; w. Benecke. “Actionneur microfabriqué avec aimant permanent en mouvement”.
- ^ DODRILL, B. C.; B. J. Kelley. “Mesure avec un VSM – Matériaux d’aimant permanent”.
- ^ Arnold, D. “Aimants permanents pour MEMS”.
- ^ Gibbs, M R J; E W Hill; P J Wright. “Matériaux magnétiques pour les applications MEMS”.
- ^ National Imports LLC. “Manuel de sélection et de conception des aimants permanents”.
- ^ Arnold, D. “Aimants permanents pour MEMS”.
- ^ Wang, N. (2010). “Fabrication et intégration des matériaux d’aimant permanent dans les transducteurs MEMS”. Bibcode: 2010phdt …….. 49W .
- ^ Arnold, David. “Aimants permanents pour MEMS”.
- ^ Schiavone, Giuseppe; Desmulliez, Marc P. Y.; Walton, Anthony J. (2014-08-29). “Relais MEMS magnétiques intégrés: statut de la technologie” . Micromachines . 5 (3): 622–653. est ce que je: 10.3390 / MI5030622 .
- ^ Chin, Tsung Shune (2000). “Films d’aimant permanent pour les applications dans les systèmes micro-électro-mécaniques”. Journal of Magnétisme et Matériaux magnétiques . 209 (1): 75–79. Bibcode: 2000jmmm..209 … 75c . est ce que je: 10.1016 / s0304-8853 (99) 00649-6 .
- ^ Arnold, D.; B. Bowers; N. Wang (2008). “Micromagnets NDFEB liés à la cire pour les applications de systèmes microélectromécaniques”. Journal of Applied Physics . 103 (7): 07e109. Bibcode: 2008Jap … 103ge109w . est ce que je: 10.1063 / 1,2830532 .
- ^ Wang, N. (2010). “Fabrication et intégration des matériaux d’aimant permanent dans les transducteurs MEMS”. Bibcode: 2010phdt …….. 49W .
- ^ Yang, tzu-shun; Nagang Nga Nga Sangwan; David P. Arnold. “Facarcation et caractérisation des micromtnets en poudre ND – B-B liés à Parylene”
- ^ Guckel, H. “Progrès dans les microactuateurs magnétiques”.
- ^ Gatzen, Hans H. “Avances dans la technologie européenne magnétique MEMS”.
Recent Comments