Recherches sur la surface de l’eau – Wikipedia wiki
Procédures pour trouver des objets ou des personnes perdues à la surface d’un plan d’eau
Recherches de surface de l’eau sont des procédures effectuées sur ou sur la surface d’un plan d’eau dans le but de trouver des récipients, des personnes ou des objets flottants perdus, qui peuvent utiliser une ou plusieurs variété de modèles de recherche en fonction de la cible de la recherche, comme le La direction et le taux de dérive varient en fonction des caractéristiques de la cible et des conditions d’eau et météorologiques à l’époque. L’efficacité d’un modèle de recherche est également influencée par les caractéristiques de la plate-forme de recherche. Une ou plusieurs plates-formes de recherche peuvent être utilisées. [d’abord]
Facteurs influençant le choix du modèle de recherche et de l’actif de recherche: [d’abord] [2]
- Vitesse et direction de dérive, qui est affectée par
- Visibilité de l’objet
- Taille et couleur de l’objet
- Hauteur au-dessus de l’eau des observateurs
- Éclairage et conditions atmosphériques
- Conditions de surface de l’eau
- Confiance de la dernière position connue et du temps écoulé
- Facteurs géographiques
Datum et dernière position connue [ modifier ]]
Une recherche est grandement facilité lorsque la dernière position connue de la cible est connue avec précision dans le temps et l’espace. Si le temps était récent, les conditions météorologiques et l’eau peuvent ne pas avoir beaucoup changé et la dérive peut être estimée avec une certaine confiance. La référence est la position estimée de la cible au moment où la recherche démarre, qui est la dernière position connue corrigée pour la dérive. Les estimations de la dérive sont affectées par les changements dans les conditions du vent et de l’eau, entraînées par la météo et peuvent varier selon l’emplacement car la cible dérive dans des zones de plus en moins abritées. La recherche sera généralement lancée à ou près de la référence. Une bouée de marqueur de référence est un outil utilisé pour marquer le mouvement de la donnée pendant la recherche et pour fournir des estimations mises à jour pour la vitesse et la direction de dérive. Une bouée de marqueurs de référence doit être choisie pour dériver à la même vitesse que la cible dans la mesure raisonnablement possible et pour rester visible et identifiable pendant la recherche. [2]
Légnon, set et dérive [ modifier ]]
La lentille est la composante sous le vent du mouvement d’un objet flottant en raison des forces de vent, tandis que le courant ajoutera un composant dans la direction (ensemble) du flux de courant à la vitesse (dérive) du courant à ce point. Cette combinaison est vaguement appelée dérive de l’objet flottant. [3] [4] [5] Bien que ces quantités puissent être estimées et mesurées, plusieurs schémas de recherche utilisent un marqueur de réduction de la réduction qui est sélectionné pour dériver à un taux similaire à la cible de la recherche, qui compense automatiquement ces effets après la prise en compte du décalage initial. [2]
Modèles de recherche [ modifier ]]
Les modèles de recherche sont des méthodes pour voyager systématiquement sur la surface de la zone d’eau dans laquelle la cible est susceptible d’être trouvée, tandis que les observateurs et / ou les instruments sont déployés avec l’intention de détecter les cibles de la recherche. Un modèle de recherche efficace est celui dans lequel la surface entière peut être examinée avec de bonnes chances de détecter la cible si elle est présente, mais sans chevauchement excessif, bien que certains chevauchements soient généralement considérés comme recommandés pour permettre des estimations inexactes de la visibilité et de la mer de la cible et de la mer et de la mer et de conditions atmosphériques. Plusieurs modèles de recherche standardisés sont courants, dont certains conviennent plus aux navires de surface, et d’autres conviennent plus aux avions. Des modèles de recherche similaires sont utilisés pour les recherches sous-marines. La plupart des modèles de recherche de surface de l’eau sont suivis par rapport à une donnée mobile, donc la direction est par la boussole et la distance est déterminée par la vitesse à travers l’eau et le temps écoulé. La vitesse et la direction sur le sol varieront en fonction de la dérive. [2]
Recherche de littoral [ modifier ]]
Une recherche de littoraux est généralement utilisée lorsqu’il est considéré comme probable que les survivants ou les débris peuvent avoir lavés à terre, ou que les survivants peuvent avoir réussi à se terminer par leurs propres efforts, et sont souvent utilisés en conjonction avec des modèles de recherche en eau libre par d’autres navires à proximité, spécialement spécialement le long d’une côte Lee. Un récipient de brouillon peu profond, maniable est le mieux adapté à ce travail, qui peut nécessiter des manœuvres serrées parmi les dangers de navigation ou les débris. [2]
Recherche de secteur [ modifier ]]


Une recherche sectorielle, également connue sous le nom de Victor Sierra (VS) par les États-Unis et les gardes côtiers canadiens, est un modèle de recherche adapté à un petit objet dans un endroit bien défini qui couvre une zone circulaire centrée sur une position rapportée en utilisant un itinéraire composé de Des segments de ligne droite qui couvrent efficacement une zone circulaire et sont adaptés pour tenir compte de la dérive. Tout d’abord, le navire de recherche fait une mesure de la vitesse et de la direction de dérive, en utilisant un marqueur de dérive de données pour indiquer la dérive en temps réel. Le motif est orienté par rapport au marqueur de référence, et la piste sur le sol peut sembler considérablement différente en raison de la superposition de la dérive. En direction par boussole et directement vers la rédriction de la réduction à chaque troisième étape, le navire de recherche dérive le même montant que la donnée, qui est la quantité supposée de dérive pour la cible. Si la recherche initiale du secteur – souvent commencé dans une direction approximativement dérive – est infructueuse, une deuxième recherche sectorielle peut être compensée de 30 ° de chaque côté pour donner une meilleure couverture de la même masse d’eau de surface. [d’abord] [2]
Voie parallèle [ modifier ]]

Également connu sous le nom de Papa Sierra (PS), ce modèle est utile pour couvrir une grande zone où aucune donnée précise n’est disponible. Il peut être utilisé par un seul navire ou plusieurs navires, et pour toute taille de cible, bien que la distance d’avance entre les jambes de recherche variera en fonction de la visibilité estimée de la cible. [2]
|
Cette section Besoin d’expansion avec: Description du motif. Vous pouvez vous aider en y ajoutant. ( Janvier 2022 )
|
Ligne rampante [ modifier ]]

Également connue sous le nom de Charlie Sierra (CS), un modèle de recherche de ligne rampant utilise comme modèle de va-et-vient des jambes de recherche espacées en fonction de la plage de visibilité cible estimée, mais avec des jambes relativement plus courtes, et est utilisé dans des circonstances similaires à une piste parallèle Modèle, en particulier lorsque la cible devrait être à une extrémité de la zone de recherche. La ligne rampante est considérée comme plus efficace dans les zones de dérive ou de courant contraintes par les rivages, comme dans les baies ou canaux étroits, où les jambes sont passées sur le courant et progressent contre l’écoulement. [2]
Recherche de barrière [ modifier ]]

Également connue sous le nom de Bravo Sierra (BS), le modèle de recherche de barrière est utilisé lorsqu’il existe des courants forts ou une dérive qui devraient transporter la cible par un écart entre les points de référence géographiquement fixes en aval de la donnée estimée. Le navire sera dirigé pour rester approximativement sur la ligne de barrière car il traverse à plusieurs reprises l’écart. [2]
|
Cette section Besoin d’expansion avec: Diagramme de motif. Vous pouvez vous aider en y ajoutant. ( Janvier 2022 )
|
Expansion de la recherche carrée [ modifier ]]
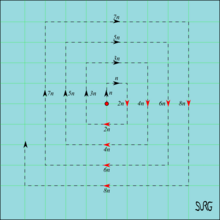
Ce modèle est utilisé lorsque la donnée est relativement précise et que la dérive est probablement petite. Le marqueur de la référence est déployé à la référence estimée, et la recherche commence à partir de là, la longueur de la jambe incrémente en même temps à chaque deuxième virage. Tous les tours sont à 90 ° dans la même direction de rotation (généralement vers la droite). Une vitesse constante comprise entre 5 et 10 nœuds est suggérée pour une recherche d’une personne dans l’eau, et la longueur des jambes est déterminée par le temps. L’espacement des pistes est déterminé par la visibilité de la cible, et est égal à la longueur de la première étape, la piste se dilate vers l’extérieur en continu et est superposée sur la dérive. Il est nécessaire de maintenir un enregistrement précis des incréments de longueur des jambes pour s’assurer qu’ils se produisent au bon moment et à droite. [2]
Détection de cible [ modifier ]]
Recherche visuelle [ modifier ]]
- Observateurs – Disposition, tâche
- Jour / nuit: Dans tous les cas, une petite cible apparaîtra mieux dans un arrière-plan contrastant, avec un minimum d’éblouissement, et le modèle de recherche peut être adapté pour fournir de meilleures conditions de repérage. Les lunettes de vision nocturne peuvent être utiles pour aider les observateurs à choisir des objets dans l’obscurité en agrandissant la lumière ambiante existante, mais l’efficacité peut être réduite par la lumière réfléchie par la neige, la pluie, le brouillard ou les particules de pulvérisation. Les systèmes de vision nocturne infrarouge montrent une image basée sur les différences de température. Ces deux systèmes fonctionnent mieux lorsque l’arrière-plan est exempt de distracteurs comme les lumières de la ville sur un rivage ou les lumières de navigation des navires à proximité. [2]
- Éclairage: les projecteurs et les poussées de parachute peuvent être utiles la nuit. [2]
- La plage visuelle efficace varie selon l’élévation, l’éclairage, l’éblouissement, le rétro-éclairage et les conditions de la mer. La recherche doit être adaptée en fonction.
- Technique de recherche visuelle. L’efficacité de la recherche visuelle active dépend d’une technique efficace. Un système recommandé par les garde-côtes canadiens est de commencer un balayage à court terme et de travailler vers l’extérieur à travers le secteur désigné dans une série de balayages parallèles, à la limite de perception, suivi d’une courte pause, puis d’une autre recherche du secteur . Le mouvement de la tête est recommandé lors de la balayage pour réduire le sur-rauvrage des muscles oculaires, ce qui peut provoquer une fatigue précoce. [2] Les balayages effectués dans des segments de 10 à 15 degrés, avec un recentrage à la fin de chaque segment permettent aux yeux d’enregistrer des objets à environ 8 degrés dans la direction de la mise au point. L’omission des étapes de mise au point réduit l’efficacité de la détection. La vision périphérique est plus sensible à la lumière à faible intensité, et cela peut être appliqué la nuit pour détecter la lumière faible uniquement détectable aux bords de la perception. [2]
|
Cette section Besoin d’expansion . Vous pouvez vous aider en y ajoutant. ( Janvier 2022 )
|
Écoute [ modifier ]]
|
Cette section Besoin d’expansion . Vous pouvez vous aider en y ajoutant. ( Janvier 2022 )
|
Radar [ modifier ]]
|
Cette section est vide. Vous pouvez vous aider en y ajoutant. ( Janvier 2022 )
|
Infrarouge [ modifier ]]
|
Cette section est vide. Vous pouvez vous aider en y ajoutant. ( Janvier 2022 )
|
Largeur de balayage et espacement de la piste [ modifier ]]
La largeur du balayage est la distance qui, de la plate-forme de recherche que les observateurs, peuvent couvrir efficacement. Il est affecté par tous les facteurs qui affectent la détection de la cible à partir de la plate-forme de recherche, tels que la taille, la couleur et le type de la cible, les conditions de la mer et de l’atmosphère, le spray, l’éblouissement et l’éclairage, les distracteurs comme le flotsam, la vitesse de la plate-forme de recherche et le mouvement, le nombre et l’élévation au niveau des yeux des observateurs et la fatigue de l’équipage. Il est en outre modifié en appliquant un facteur de couverture pour le chevauchement afin de déterminer l’espacement de la piste. Un chevauchement réduit le risque de manquer complètement la cible, mais augmente le temps pris pour effectuer la couverture de recherche d’une zone donnée. [2]
Voir également [ modifier ]]
Autres articles liés aux recherches physiques:
Les références [ modifier ]]
Recent Comments