重力ターン方式 – Wikipedia
|
|
この項目「重力ターン方式」は翻訳されたばかりのものです。不自然あるいは曖昧な表現などが含まれる可能性があり、このままでは読みづらいかもしれません。(原文:en:Special:Redirect/revision/985977997)
修正、加筆に協力し、現在の表現をより自然な表現にして下さる方を求めています。ノートページや履歴も参照してください。(2020年12月) |
重力ターン(じゅうりょくターン、英: gravity turn)またはゼロリフトターン(英: zero-lift turn)とは、天体の周回軌道に宇宙機を投入、もしくは逆に周回軌道から宇宙機を着陸させる際におこなうマニューバのひとつであり、重力を使用して機体を目的の軌道に誘導する軌道最適化のひとつである。高度を稼ぐための垂直飛行から軌道速度を稼ぐための水平飛行に遷移するための姿勢制御を、すべて機体に取り付けたスラスタなどの推力にのみ頼って行う場合と比較して、重力ターン方式の主な利点として次の2つが挙げられる。第一に、機体の進行方向を変えるために推力を用いないため、より多くの推力を軌道速度への加速に使うことができる。第二のより重要な利点は、上昇段階の間、機体の迎え角をゼロもしくは小さくすることができる点である。これにより、機体横方向への空力的応力を最小限に抑えることができ、機体の軽量化が可能となる[1][2]。
重力ターンという用語は、軌道投入および軌道離脱以外に、惑星の重力を使用して宇宙機の方向を変えること全般を指して用いられる場合がある[3]。この文脈で使用される場合、スイングバイとも似ているが、スイングバイと言った場合は宇宙機の方向変更と同時に加減速を行うことがあるのに対し、重力ターンと言った場合は方向のみの変更を指す。
打ち上げ手順[編集]
垂直上昇[編集]




重力ターンは、スペースシャトルなど、垂直に発射するロケットにおいて広く一般的に使用されている。ロケットはまずまっすぐ上に上昇し、垂直速度と高度の両方を上げる。この段階においては、重力加速度がロケットの推力による加速度から直接減算され、ロケットの垂直方向への加速度を低下させる。この加速度損失は重力損失と呼ばれ、ピッチオーバーマニューバと呼ばれる操作をできるだけ早く実行することで最小限に抑えることができる。また、機体への大きな空力負荷を避けるためにも、ピッチオーバーは垂直速度が小さいときに実行する必要がある[1]。
ピッチオーバーは、ロケットエンジンをわずかにジンバルして、推力の一部を片側に向ける(推力偏向)ことにより達成される。この力により機体にはトルクがかかり、向きが垂直方向から変わる。ピッチオーバー角度はロケットによって異なり、ロケットの慣性航法装置に入力されている[1]。わずか数度とするロケットもあれば、数十度という比較的大きな角度とするロケットもある。ピッチオーバーが完了すると、エンジンは再度ロケットの軸に沿った方向に戻される。理想的な重力ターン軌道投入においては、操舵目的で推力を用いる必要があるのはこの段階のみである。ピッチオーバーマニューバには2つの目的があり、1つはロケットをわずかに回転させて飛行経路を垂直から逸らすことである。2つめは、軌道投入に向けてロケットを正しい方向に向けることである。ピッチオーバーの後は軌道投入完了まで、ロケットの迎え角はゼロに調整される。これにより横方向の空力負荷を低減でき、上昇中の揚力も無視できる。
ダウンレンジ加速[編集]
ピッチオーバーの後は、ロケットの飛行経路は完全に垂直ではなくなるため、重力の作用により飛行経路は地面に向かって曲がっていく。ロケットが推力を発生していなかった場合、飛行経路はボールを投げた場合と同様単純な楕円になり[注釈 1]、やがて水平を通り越して地面へと落下していく。しかし、ロケットは推力を発生しているため、水平を向くまでに安定した軌道に投入するに足る十分な高度と速度を得ることができる。
多段ロケットの場合、各段の分離とエンジン点火との間にはある程度エンジン燃焼を停める時間が必要であるが、ロケットの設計によっては、各段の燃焼開始までに追加で慣性飛行する時間が必要となる場合がある。ロケットの推力が大きい場合には特に、すぐ燃焼を始めるとロケットが重力により水平方向を向くよりもはるかに前に燃料を使い果たしてしまうため、慣性飛行時間は長くなる[2]。この手法は、地球など大気の厚い惑星からの打ち上げの場合にも有効となる。慣性飛行中にも重力により飛行経路は回転しつづけるため、ピッチオーバー角をより小さくとることができ、そのぶん垂直速度を大きくとり、大気圏からより速やかに脱出することができる。これにより、打ち上げ時の空力損失と空力負荷の両方を軽減することができる。その後、慣性飛行中に大気圏よりも上でロケットは水平になるため、迎え角がゼロの状態でエンジンを再点火すれば機体は水平方向に加速されて軌道へと投入される。
降下および着陸手順[編集]
月のように大気のない天体に着陸する際は熱シールドやパラシュートは利用できないため、重力ターンを用いた動力降下が良い選択肢となる。アポロ月着陸船は、大筋は重力ターンを用いて月の周回軌道から離脱して着陸した。地表における機体が着陸の場合は最も軽く、打ち上げの場合には最も重いことを除けば、本質的に着陸は打ち上げの逆手順で行なわれる。アポロ計画において、Lander プログラムは質量噴射速度を負、すなわちロケット噴射によりタンクが重くなることにして重力ターン打ち上げをシミュレートすることにより重力ターン着陸をシミュレートした[4]。重力ターンマニューバを用いて着陸を行うという考え方は、もともとはサーベイヤー計画のために開発されたが、サーベイヤーは月周回軌道に投入されることなく直接月面着陸を行った[5]。
軌道離脱と突入[編集]

宇宙機はまず姿勢を変更し、逆噴射を行って軌道速度を落とし、大気のない天体への着陸の場合は近点を地表近くまで下げる。火星のような大気のある惑星への着陸の場合、地表ではなく大気圏上層に近点を下げるに留める。軌道離脱噴射が完了した後、宇宙機は着陸地点に近づくまで慣性飛行するか、迎え角をゼロに保ちながらエンジン噴射し続ける。大気圏を持つ惑星への大気圏突入も無動力で行われる。
慣性飛行を終え、もし行う場合は突入噴射を行った後、最終的な着陸噴射に備えて必要のなくなった熱シールドおよびパラシュートを投棄する。大気が十分に厚い場合は、大気を使って機体速度をかなり遅くすることができるため、燃料を節約できる。この場合、重力ターンは最適な進入軌道ではないが、必要なデルタVを近似的に算出するために利用可能である[6]。一方、大気がない場合は、軟着陸のためには必要なデルタVをすべて推力によりまかなう必要がある。
着陸[編集]

まだ機体が適切な方向を向いていない場合、エンジンを対地表速度ベクトルの真逆に向ける。このベクトルは、左に示すように、地表に平行であるか、垂直成分はわずかである。次に、エンジンを噴射して着陸のために減速を行う。水平速度を相殺するにつれて、天体の重力により軌道は垂直降下に近づく。完全に球形な天体における理想的なマニューバでは、水平速度、垂直速度、高度は同時にゼロに到達し、表面に安全に着陸できる(天体が自転していない場合に限る。天体が自転している場合は、着陸地点の緯度における水平速度を考慮する必要がある)。しかし、岩や不均一な地形のため、通常、マニューバの終わり近くで数度の迎え角をとり、地表より上で水平速度をゼロにする。この手順は、打ち上げ時に行われるピッチオーバーマニューバの逆であり、機体は真下を向いてホバリングし、表面に軟着陸する。
誘導と制御[編集]
ロケットの操舵システムは、ロケットを目的の方向に向ける制御システムと、所与のターゲットに到達するためにロケットを向けるべき方向を決定する誘導システムの二つに分けられる。ターゲットは、弾道ミサイルのように地上のある地点とする場合と、ロケットの場合のように特定の軌道とする場合とがある。
打ち上げ[編集]
重力ターン軌道は、上昇初期段階において最も一般的に使用される。誘導プログラムは、事前計算されたピッチ角と時刻の対応表である。制御は、エンジンのジンバル角および動翼により行われる。ピッチ角は、機体にかかる空力負荷を最低限に抑えるため、真空空間に達するまでは迎え角ゼロに維持される(空力負荷が大きすぎると、機体はすぐに破壊されてしまう)。 一部の用途ではピッチ角を事前計算するだけで足りるが、近代的なロケットのほとんどすべてに加速度計とジャイロスコープを使用して位置、方向、速度を決定する適応的慣性誘導システムが搭載されている。事前計算済みピッチスケジュールで飛行し、軌道誤差を修正しないロケットの例として、英国の衛星打ち上げ用ロケットであるブラック・アローが挙げられる。一方、アポロ・サターンロケットは大気圏内で重力ターンを行ったあとは閉ループ慣性誘導を利用した[7]。
最初のピッチプログラムは事前計算した挙動をなぞるだけの開ループシステムであり、風や推力変動などにより目標軌道からのずれを生じる。大気中では迎え角をゼロに保つため、軌道修正は行われない[8]。宇宙空間に達して大気の影響を受けなくなった後、より複雑な閉ループ誘導プログラムに切り替えて軌道偏差を修正し、目的の軌道を得る。アポロ計画では、閉ループ誘導への移行は、一定の慣性姿勢を維持したまま第1段と段間リングを投棄した後、第2段の初期段階で行われた。ロケットの上段はほぼ真空で作動するため、翼には効果がない。操舵はエンジンのジンバリングと姿勢制御システムのみにより行われる。
着陸(誘導と制御)[編集]
重力ターンを動力着陸に使用する方法の例として、大気のない天体に着陸するアポロ型着陸船を想定する。着陸船は、最初は司令船にドッキングされた状態で円軌道を周回している。司令船と分離した後、着陸船は逆噴射し、近点を地表のすぐ上まで下げる。次に、遠点まで慣性飛行し、そこでエンジンを再始動して重力ターン降下を実行する。このとき、軌道上の司令船への視線方向と推力ベクトルが一定の角度をなすように維持することによって誘導することができる[9]。この単純な誘導アルゴリズムは、アップレンジホライズン、ダウンレンジホライズン、着陸目標地点、軌道上の司令船など、さまざまな視覚的誘導目標の活用方法を調査した研究に基づいている[10]。この研究では、司令船は着陸がほぼ完了するまで、理想的な重力ターンに対してほぼ一定の視線角度が維持されるため、司令船が最良の誘導目標であると結論付けている。着陸船は真空状態で降下するため、姿勢制御には動翼を活用することはできず、メインエンジンのジンバリング、姿勢制御スラスタ、場合によってはコントロール・モーメント・ジャイロスコープなどのシステムを使用する必要がある。
重力ターン軌道は操舵に最小限の推力しか要しないが、可能な軌道のうち最も効率的な打ち上げ・着陸軌道になるとは限らない。重力ターンに影響を及ぼすいくつかの要因により効率が低下したり、打ち上げロケットの設計上の制限のために不可能である場合もある。影響要因を以下に簡単にまとめる。
- 大気 — 重力損失を最小限に抑えるためには、上昇開始後にすぐ水平方向に加速を始める必要がある。月のような大気のない天体では問題にならないが、大気が濃密な天体では機体が大気の抵抗を受けるため不可能である。ダウンレンジ加速を開始する前に高高度まで垂直上昇すれば空力損失は減らせるが重力損失は増え、逆にダウンレンジ加速を早期に開始すれば重力損失を減らせるが飛行中の空力損失を増えるというトレードオフが存在する。
- 最大動圧 — 大気に関連する別の影響として、打ち上げ中にロケットにかかる最大動圧が挙げられる。動圧は、大気の密度と機体の対気速度の両方に依存する。離昇直後は、機体の速度上昇の影響は大気密度の低下の影響よりも大きく、動圧は上昇していく。速度上昇による動圧上昇と大気密度低下による動圧低下がつりあう点で圧力は最大となり、この点を最大動圧点 (max-Q) と呼ぶ。ロケットの機体はこの最大応力に耐えるように建造する必要がある。前項と同様、より厚い大気のもとで加速することを避けようとして加速を始める前に高高度まで上昇すると重力抗力は大きくなり、より低い高度で大きく加速すると打ち上げ時に発生する最大動圧が高くなるため機体の強度を高めなければならず、打ち上げロケットが重くなるというトレードオフが存在する。
- 最大推力 — ロケットエンジンが出せる最大推力は、重力ターンにいくつかの面で影響を与える。まず、ピッチオーバーマニューバの前に、機体は重力に打ち勝って上向きに加速する必要がある。ロケットの加速度が重力加速度よりも大きければ大きいほど、より速い垂直速度を得ることができ、打ち上げ初期段階における重力損失を低減できる。ピッチオーバーの次のダウンレンジ加速段階にもエンジン推力は影響を及ぼす。推力が高いほど、軌道速度への加速も速くなる。この時間が短くなることとにより、ロケットはより早く水平飛行に移ることができ、重力損失をさらに低減できる。推力が高いほど打ち上げをより効率的できるが、低高度で加速すると最大動圧が増加する。この影響は機体が十分上昇してダウンレンジ加速を開始するまでエンジン出力を絞ることで軽減できる。しかし、固体燃料ロケットでは出力の調整が不可能な場合がある。
- 最大許容ペイロード加速度 — エンジン推力に関連する別の制限として、乗組員および積荷の安全を担保するために課せられる最大加速度が挙げられる。メインエンジンカットオフ (MECO) の直前では、ロケットは燃料の大部分を消費しており、打ち上げ時よりもはるかに軽くなる。このときエンジンが最大推力を出していると、機体質量が小さくなった分 加速度が過大になる場合があり、乗組員の負傷や積荷の損傷を防ぐためにエンジンの出力を抑えなければならない。これにより、水平速度を得るまでにかかる時間は長くなり、重力損失が増加する。
軌道変更における利用[編集]
飛行方向の大幅な変更が必要な宇宙船ミッションの場合、大きなデルタVが要求されるため、宇宙船自体の推進力では達成できない場合がある。このような場合、近くの天体をフライバイすることにより天体の重力を利用して飛行方向を変更できる場合がある。このマニューバはスイングバイと非常に似ているが、スイングバイは速度と方向の両方の変更を意味することが多いのに対し、重力ターンは飛行方向のみを変更するという点で異なる。
このマニューバの変形として、ある天体から出発した宇宙機が、以降は全く推力を利用せず別の天体を周回し、もとの惑星に戻ることができる自由帰還軌道が挙げられる。完全な自由帰還軌道を採ることは理論的には可能だが、実際には飛行中に小さな修正噴射が必要になることが多い。復路での噴射は必要ないものの、空力ターンなどの他の復路タイプのほうがミッション全体での合計デルタVが小さい場合もある[3]。
宇宙飛行での使用[編集]
多くの宇宙飛行ミッションでは、直接または変更された形式で重力ターンを利用している。重力ターン方式を利用したさまざまなミッションのごく一部を以下に列挙する。
- サーベイヤー計画 — アポロ計画の前身であるサーベイヤー計画の主なミッションは、着陸船に組み込まれた自動降下プログラムおよび着陸プログラムにより、月面に軟着陸する機能を開発することであった[11]。着陸手順は重力ターン降下に分類できるが、アポロ着陸船のように最初に月を周回するのではなく、地球から直接月面に向けて発射されたという点で、最も一般的に採用されている手法とは異なる。このため、重力「ターン」は若干行われたものの降下経路はほぼ垂直だった[要出典]。
- アポロ計画 — アポロ計画におけるサターンVロケットの打ち上げは、ロケットにかかる横方向の応力を最小限に抑えるために重力ターンを活用して実行された。月でも月着陸船は重力ターン着陸と重力ターン打ち上げを行った。
- おおすみ – 日本で初めて打ち上げられた人工衛星おおすみは、「無誘導重力ターン方式」を採用したL-4Sロケットにより打ち上げられた[12]。姿勢制御は一度しか行われず、ロケットの飛行経路は重力に任された。
数学的説明[編集]
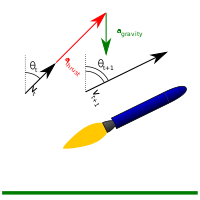
重力ターン軌道の最も単純なものは、空気抵抗を無視して、均一な重力場の下で加速する質点により記述される。推力
は、大きさと方向が時間の関数として変化するものとする。これらの仮定の下で、次の微分運動方程式が得られる。
 は、大きさと方向が時間の関数として変化するものとする。これらの仮定の下で、次の微分運動方程式が得られる。
は、大きさと方向が時間の関数として変化するものとする。これらの仮定の下で、次の微分運動方程式が得られる。

ここで、
は垂直方向の単位ベクトル、
 は垂直方向の単位ベクトル、
は垂直方向の単位ベクトル、は機体質量の瞬時値である。推力ベクトルがを速度ベクトルと同じ向きを向くという拘束条件の下では、運動方程式を
 は機体質量の瞬時値である。推力ベクトルがを速度ベクトルと同じ向きを向くという拘束条件の下では、運動方程式を
は機体質量の瞬時値である。推力ベクトルがを速度ベクトルと同じ向きを向くという拘束条件の下では、運動方程式を に平行な成分と
 に平行な成分と
に平行な成分と に垂直な成分とに分けることで次の連立方程式を得る[13]。

ここで、その時刻における推力重量比
および速度ベクトルと鉛直線との成す角度
 および速度ベクトルと鉛直線との成す角度
および速度ベクトルと鉛直線との成す角度 とを用いた。この連立方程式を解けば軌道が得られる。ただし、
 とを用いた。この連立方程式を解けば軌道が得られる。ただし、
とを用いた。この連立方程式を解けば軌道が得られる。ただし、が全行程にわたって定数となる最も単純な場合を除いて、この連立方程式は解析的には解けず、数値積分を用いる必要がある。
 が全行程にわたって定数となる最も単純な場合を除いて、この連立方程式は解析的には解けず、数値積分を用いる必要がある。
が全行程にわたって定数となる最も単純な場合を除いて、この連立方程式は解析的には解けず、数値積分を用いる必要がある。
無誘導重力ターン[編集]
L-4Sロケットによるおおすみの打ち上げにおいては、政治的な問題から誘導装置の開発が遅れたために無誘導での打ち上げが行われることになった。これはロケット本体をランチャーによって傾けて発射することでピッチオーバーマニューバを省略、さらに第3段燃焼終了後の慣性飛行中に姿勢制御を行い、遠地点において地上からの制御で第4段に点火、軌道投入するもので、動力飛行中の誘導制御を一切行わない[14][15]。
この方式では高度な技術を要する誘導装置が不要な代わりに、ロケットが風で流されたりロケットモーターの燃焼時間誤差で投入軌道に誤差が生じる、設計段階で想定した軌道にしか投入できない、といった欠点があり、後のM-3Cロケットから各段に順次設定した軌道とのズレを補正する誘導装置が搭載されてゆき、M-Vロケットではピッチオーバーマニューバを含めた積極的な誘導制御が行われるまでになった[16][17]。
注釈[編集]
- ^ 放物線になると考えるのはよくある間違いである。地球が平らで、重力が常に同じ方向を向いている場合にのみ軌道は放物線となる。地球の半径に比べて飛距離が十分短い場合においてのみ放物線による近似が通用する。
出典[編集]
- ^ a b c Glasstone, Samuel (1965). Sourcebook on the Space Sciences. D. Van Nostrand Company, Inc. pp. 209 or §4.97
- ^ a b Callaway, David W. (March 2004). “Coplanar Air Launch with Gravity-Turn Launch Trajectories”. Masters Thesis.
- ^ a b Luidens, Roger W. (1964). “Mars Nonstop Round-Trip Trajectories”. American Institute of Aeronautics and Astronautics 2 (2): 368–370. Bibcode: 1964AIAAJ…2..368L. doi:10.2514/3.2330.
- ^ Eagle Engineering, Inc (September 30, 1988). “Lander Program Manual”. NASA Contract Number NAS9-17878 EEI Report 88-195.
- ^ “Boeing Satellite Development: Surveyor Mission Overview”. boeing.com. Boeing. 2010年2月7日時点のオリジナルよりアーカイブ。2010年3月31日閲覧。
- ^ Braun, Robert D.; Manning, Robert M. (2006). “Mars Exploration Entry, Descent and Landing Challenges”. IEEE Aerospace Conference. pp. 1. doi:10.1109/AERO.2006.1655790. ISBN 0-7803-9545-X. オリジナルのSeptember 3, 2006時点におけるアーカイブ。
- ^ “Launch vehicle handbook. Compilation of launch vehicle performance and weight data for preliminary planning purposes”. NASA Technical Memorandum TM 74948. (September 1961).
- ^ “Apollo systems description. Volume 2 – Saturn launch vehicles”. NASA Technical Memorandum TM X-881. (February 1964).
- ^ Barker, L. Keith (December 1964). “Application of a Lunar Landing Technique for Landing from an Elliptic Orbit Established by a Hohmann Transfer”. NASA Technical Note TN D-2520.
- ^ Barker, L. Keith; Queijo, M. J. (June 1964). “A Technique for Thrust-Vector Orientation During Manual Control of Lunar Landings from a Synchronous Orbit”. NASA Technical Note TN D-2298.
- ^ Thurman, Sam W. (February 2004). “Surveyor spacecraft automatic landing system”. 27th Annual AAS Guidance and Control Conference
- ^ “ロケット一覧 (PDF)”. 内之浦宇宙空間観測所の50年. ISAS. 2020年12月20日閲覧。
- ^ Culler, Glen J.; Fried, Burton D. (June 1957). “Universal Gravity Turn Trajectories”. Journal of Applied Physics 28 (6): 672–676. Bibcode: 1957JAP….28..672C. doi:10.1063/1.1722828.
- ^ “無誘導打上げ方式とは”. 日本の宇宙開発の歴史 宇宙研物語. 宇宙科学研究所. 2021年10月7日閲覧。
- ^ 『内之浦宇宙空間観測所の50年』 宇宙航空研究開発機構、2012年、30頁。
- ^ “4段式から3段式へ──M-3C”. 日本の宇宙開発の歴史 宇宙研物語. 宇宙科学研究所. 2021年10月7日閲覧。
- ^ 『内之浦宇宙空間観測所の50年』 宇宙航空研究開発機構、2012年、32-36頁。
Recent Comments