
Hệ thống treo điện từ (EMS) là sự bay lên từ tính của một vật thể đạt được bằng cách thay đổi liên tục cường độ của từ trường được tạo ra bởi nam châm điện sử dụng vòng phản hồi. Trong hầu hết các trường hợp, hiệu ứng bay phần lớn là do nam châm vĩnh cửu vì chúng không có bất kỳ sự tiêu tán năng lượng nào, với nam châm điện chỉ được sử dụng để ổn định hiệu ứng.
Theo Định lý của Earnshaw, một cơ thể được từ hóa tối ưu không thể ở trạng thái cân bằng ổn định khi được đặt trong bất kỳ sự kết hợp nào của trường hấp dẫn và từ trường. Trong các loại trường này tồn tại một điều kiện cân bằng không ổn định. Mặc dù các trường tĩnh không thể mang lại sự ổn định, nhưng EMS hoạt động bằng cách liên tục thay đổi dòng điện được gửi đến nam châm điện để thay đổi cường độ của từ trường và cho phép xảy ra tình trạng bay ổn định. Trong EMS, một vòng phản hồi liên tục điều chỉnh một hoặc nhiều nam châm điện để điều chỉnh chuyển động của đối tượng được sử dụng để hủy bỏ sự không ổn định.
Nhiều hệ thống sử dụng lực hút từ tính kéo lên so với trọng lực của các loại hệ thống này vì điều này mang lại sự ổn định bên cạnh vốn có, nhưng một số sử dụng kết hợp lực hút từ tính và lực đẩy từ tính để đẩy lên trên.
Công nghệ nâng từ trường rất quan trọng vì nó làm giảm mức tiêu thụ năng lượng, phần lớn làm giảm ma sát. Nó cũng tránh hao mòn và có yêu cầu bảo trì rất thấp. Ứng dụng của bay từ trường được biết đến nhiều nhất với vai trò của nó trong các chuyến tàu Maglev.
Lịch sử [ chỉnh sửa ]
Samuel Earnshaw là người phát hiện ra vào năm 1839 rằng một cơ thể tích điện đặt trong trường tĩnh điện không thể bay lên ở trạng thái cân bằng ổn định dưới tác động của lực điện. Hay. [1] Tương tự như vậy, do những hạn chế về độ thẩm thấu, có thể đạt được hệ thống treo hoặc bay ổn định trong một từ trường tĩnh với một hệ thống nam châm vĩnh cửu hoặc nam châm điện cố định. Phần mở rộng của Braunbeck (1939) tuyên bố rằng một hệ thống nam châm vĩnh cửu cũng phải chứa vật liệu từ tính hoặc chất siêu dẫn để có được hệ thống treo hoặc từ trường tĩnh, ổn định. [2]
Emile Bachelet áp dụng định lý Earnshaw phần mở rộng Braunbeck và ổn định lực từ bằng cách kiểm soát cường độ dòng điện và bật và tắt nguồn cho nam châm điện ở tần số mong muốn. Ông đã được trao bằng sáng chế vào tháng 3 năm 1912 cho bộ máy truyền tải thuế của mình, (bằng sáng chế số 1.020.942). [3] Phát minh của ông lần đầu tiên được áp dụng cho các hệ thống mang thư nhỏ hơn nhưng ứng dụng tiềm năng cho các phương tiện giống như tàu hỏa Rõ ràng.
Năm 1934 Hermann Kemper đã áp dụng khái niệm Bachelet, cho quy mô lớn, gọi nó là phương tiện monorail không có bánh xe gắn liền.
Năm 1979, đoàn tàu treo điện từ Transrapid chở hành khách trong vài tháng như một cuộc biểu tình trên đường ray 908 m ở Hamburg cho Triển lãm Giao thông Quốc tế đầu tiên (IVA 79).
Chuyến tàu Maglev thương mại đầu tiên cho dịch vụ thường xuyên đã được khai trương tại Birmingham, Anh năm 1984, sử dụng hệ thống treo điện từ và động cơ cảm ứng tuyến tính cho động cơ đẩy.
Bối cảnh [ chỉnh sửa ]
Electromagnets [ chỉnh sửa ]
Khi một dòng điện chạy qua một dây, từ trường xung quanh dây đó là tạo ra. Cường độ của từ trường được tạo ra tỷ lệ thuận với dòng điện qua dây dẫn. Khi một dây được cuộn, từ trường được tạo ra này được tập trung thông qua trung tâm của cuộn dây. Sức mạnh của lĩnh vực này có thể được tăng lên rất nhiều bằng cách đặt vật liệu sắt từ vào trung tâm của cuộn dây. Trường này dễ dàng được thao tác bằng cách truyền một dòng điện khác nhau trong dây. Do đó, sự kết hợp của nam châm vĩnh cửu với nam châm điện là một sự sắp xếp tối ưu cho mục đích bay lên. [4] Để giảm yêu cầu năng lượng trung bình, thông thường hệ thống treo điện từ chỉ được sử dụng để ổn định bay lên và lực nâng tĩnh chống lại trọng lực hệ thống nam châm, thường được kéo về phía một vật liệu sắt từ mềm tương đối rẻ tiền như sắt hoặc thép.
Phản hồi [ chỉnh sửa ]
Vị trí của vật thể lơ lửng có thể được phát hiện về mặt quang học hoặc từ tính, đôi khi có thể sử dụng các sơ đồ khác.
Mạch phản hồi điều khiển nam châm điện để cố giữ vật lơ lửng ở đúng vị trí.
Tuy nhiên, việc kiểm soát vị trí đơn giản thường dẫn đến sự mất ổn định, do sự chậm trễ thời gian nhỏ trong độ tự cảm của cuộn dây và trong việc cảm nhận vị trí. Trong thực tế sau đó, mạch phản hồi phải sử dụng sự thay đổi vị trí theo thời gian để xác định và làm giảm tốc độ.
Ứng dụng [ chỉnh sửa ]
Maglev [ chỉnh sửa ]

Maglev (bay từ trường) là một hệ thống vận chuyển trong đó một phương tiện được treo trên đường ray dẫn hướng theo nguyên tắc treo điện từ. Maglev có ưu điểm là yên tĩnh và mượt mà hơn so với vận chuyển có bánh xe do loại bỏ phần lớn sự tiếp xúc vật lý giữa bánh xe và đường đua. Vì maglev yêu cầu một đường ray dẫn hướng, nó chủ yếu được sử dụng trong các hệ thống giao thông đường ray như tàu hỏa.
Kể từ khi chuyến tàu maglev thương mại đầu tiên được khai trương tại Birmingham, Anh vào năm 1984, các hệ thống tàu maglev thương mại khác, như M-Bahn và Transrapid cũng đã được đưa vào sử dụng hạn chế. (Các chuyến tàu Maglev dựa trên công nghệ hệ thống treo điện động lực cũng đã được phát triển và triển khai.) Ngoại trừ có thể là Tàu Thượng Hải Maglev 30,5 km, các tuyến đường maglev EMS đường dài chính vẫn chưa được xây dựng.
Ổ đỡ từ tính hoạt động [ chỉnh sửa ]
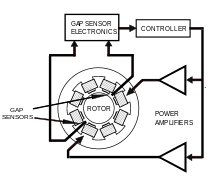
Ổ đỡ từ tính hoạt động (AMB) hoạt động theo nguyên tắc treo điện từ và bao gồm một cụm điện từ , một bộ các bộ khuếch đại công suất cung cấp dòng điện cho nam châm điện, bộ điều khiển và cảm biến khe hở với các thiết bị điện tử liên quan để cung cấp phản hồi cần thiết để điều khiển vị trí của rôto trong khe hở. Các yếu tố này được hiển thị trong sơ đồ. Các bộ khuếch đại công suất cung cấp dòng điện phân cực bằng cho hai cặp nam châm điện ở hai phía đối diện của rôto. Sự giằng co không đổi này được điều khiển bởi bộ điều khiển, bù cho dòng điện phân cực bằng các nhiễu loạn ngược dòng nhưng ngược chiều khi rôto lệch một lượng nhỏ so với vị trí trung tâm của nó.
Các cảm biến khe hở thường có cảm ứng về bản chất và ý nghĩa ở chế độ vi sai. Các bộ khuếch đại công suất trong một ứng dụng thương mại hiện đại là các thiết bị trạng thái rắn hoạt động trong cấu hình điều chế độ rộng xung (PWM). Bộ điều khiển thường là bộ vi xử lý hoặc DSP.
Viện trợ phóng tàu vũ trụ [ chỉnh sửa ]
NASA đã phát triển một thiết bị hỗ trợ phóng bằng cách sử dụng hệ thống bay từ trường để đẩy tàu vũ trụ. Những người đề xuất hỗ trợ khởi động maglev cho rằng nó tiết kiệm chi phí thiết kế và phóng, đồng thời cung cấp một phương pháp khởi động an toàn hơn. [5]
Xem thêm [ chỉnh sửa ]
Tài liệu tham khảo chỉnh sửa ]
- ^ BV Jayawant. Trong tập đoàn Atsugi Unisia, Brighton BNl 9QT, Vương quốc Anh. Trường Kỹ thuật và Khoa học ứng dụng, Đại học Sussex. Hệ thống treo và giảm điện từ.
- ^ K.X. Quian, P. Zeng, W.M. Ru, H.Y. Yuan (2005) Khái niệm mới và thiết kế mới của máy bơm máu nhân tạo quay maglev vĩnh viễn, Kỹ thuật y học & Vật lý 28 (2006) 383-388
- ^ Bằng sáng chế 1912 của Bachelet 1.020.942
- BV Jayawant. Trong tập đoàn Atsugi Unisia, Brighton BNl 9QT, Vương quốc Anh. Trường Kỹ thuật và Khoa học ứng dụng, Đại học Sussex. Hệ thống treo và giảm điện từ.
- ^ Phương tiện ra mắt thế kỷ 21 Phương tiệnMagLev được thử nghiệm là khởi động AIf. (1999/12/13). Tuần lễ hàng không & Công nghệ vũ trụ, 151 (24), 78.
Liên kết ngoài [ chỉnh sửa ]
Hệ thống treo điện từ BOSE: