In der Mathematik a Gaußsche Funktion, oft einfach als bezeichnet Gaußschist eine Funktion der Form
für beliebige reelle Konstanten ein, b und nicht Null c. Es ist nach dem Mathematiker Carl Friedrich Gauss benannt. Der Graph eines Gaußschen ist eine charakteristische symmetrische “Glockenkurven” -Form. Der Parameter ein ist die Höhe des Kurvenpeaks, b ist die Position der Mitte des Peaks und c (Die Standardabweichung, manchmal auch als Gaußsche RMS-Breite bezeichnet) steuert die Breite der “Glocke”.
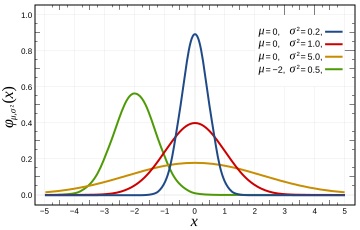
Gaußsche Funktionen werden häufig verwendet, um die Wahrscheinlichkeitsdichtefunktion einer normalverteilten Zufallsvariablen mit dem erwarteten Wert darzustellen μ = b und Varianz σ2 = c2. In diesem Fall hat der Gaußsche die Form:
[1]
Gaußsche Funktionen werden häufig in Statistiken verwendet, um die Normalverteilungen zu beschreiben, in der Signalverarbeitung, um Gaußsche Filter zu definieren, in der Bildverarbeitung, in der zweidimensionale Gaußsche für Gaußsche Unschärfen verwendet werden, und in der Mathematik, um Wärmegleichungen und Diffusionsgleichungen zu lösen und die Weierstraße zu definieren verwandeln.
Table of Contents
Eigenschaften[edit]
Gaußsche Funktionen entstehen durch Zusammensetzen der Exponentialfunktion mit einer konkaven quadratischen Funktion:
wo:
Die Gaußschen Funktionen sind somit jene Funktionen, deren Logarithmus eine konkave quadratische Funktion ist.
Der Parameter c bezieht sich auf die volle Breite bei halbem Maximum (FWHM) des Peaks gemäß
Die Funktion kann dann in Form der FWHM ausgedrückt werden, dargestellt durch w::
Alternativ der Parameter c kann interpretiert werden, indem gesagt wird, dass die beiden Wendepunkte der Funktion bei auftreten x = b – – c und x = b + c.
Das volle Breite am Zehntel des Maximums (FWTM) für einen Gaußschen könnte von Interesse sein und ist
Gaußsche Funktionen sind analytisch und ihre Grenze als x → ∞ ist 0 (für den obigen Fall von b = 0).
Gaußsche Funktionen gehören zu den Funktionen, die elementar sind, denen jedoch elementare Antiderivative fehlen. Das Integral der Gaußschen Funktion ist die Fehlerfunktion. Trotzdem können ihre unpassenden Integrale über die gesamte reale Linie unter Verwendung des Gaußschen Integrals genau ausgewertet werden
und man erhält
Dieses Integral ist genau dann 1
(die Normalisierungskonstante), und in diesem Fall ist der Gaußsche Wert die Wahrscheinlichkeitsdichtefunktion einer normalverteilten Zufallsvariablen mit dem erwarteten Wert μ = b und Varianz σ2 = c2::
Diese Gaußschen sind in der beigefügten Abbildung dargestellt.
Normalisierte Gaußsche Kurven mit erwartetem Wert μ und Varianz σ2. Die entsprechenden Parameter sind , b = μ und c = σ.
Bei Null zentrierte Gaußsche Funktionen minimieren das Fourier-Unsicherheitsprinzip.
Das Produkt zweier Gaußscher Funktionen ist ein Gaußscher, und die Faltung zweier Gaußscher Funktionen ist ebenfalls ein Gaußscher, wobei die Varianz die Summe der ursprünglichen Varianzen ist:
. Das Produkt zweier Gaußscher Wahrscheinlichkeitsdichtefunktionen (PDFs) ist jedoch im Allgemeinen kein Gaußsches PDF.
Nehmen der Fourier-Transformation (einheitliche Winkelfrequenzkonvention) einer Gaußschen Funktion mit Parametern ein = 1, b = 0 und c ergibt eine weitere Gaußsche Funktion mit Parametern
, b = 0 und
.[2] So funktioniert insbesondere der Gaußsche mit b = 0 und
werden durch die Fourier-Transformation festgehalten (sie sind Eigenfunktionen der Fourier-Transformation mit Eigenwert 1). Eine physikalische Realisierung ist die des Beugungsmusters: Beispielsweise ist ein fotografischer Objektträger, dessen Durchlässigkeit eine Gaußsche Variation aufweist, auch eine Gaußsche Funktion.
Die Tatsache, dass die Gaußsche Funktion eine Eigenfunktion der kontinuierlichen Fourier-Transformation ist, ermöglicht es uns, das Folgende Interessante abzuleiten[clarification needed] Identität aus der Poisson-Summationsformel:
Integral einer Gaußschen Funktion[edit]
Das Integral einer beliebigen Gaußschen Funktion ist
Eine alternative Form ist
wo f muss streng positiv sein, damit das Integral konvergiert.
Beziehung zum Standard-Gaußschen Integral[edit]
Das Integral
Für einige reelle Konstanten können a, b, c> 0 berechnet werden, indem sie in die Form eines Gaußschen Integrals gebracht werden. Erstens die Konstante ein kann einfach aus dem Integral herausgerechnet werden. Als nächstes wird die Integrationsvariable von geändert x zu y = x – – b.
und dann zu
Dann unter Verwendung der Gaußschen Integralidentität
wir haben
Zweidimensionale Gaußsche Funktion[edit]
3D-Darstellung einer Gaußschen Funktion mit einer zweidimensionalen Domäne.
In zwei Dimensionen die Kraft, zu der e wird in der Gaußschen Funktion jede negativ-definierte quadratische Form angehoben. Folglich sind die Pegelsätze des Gaußschen immer Ellipsen.
Ein besonderes Beispiel für eine zweidimensionale Gaußsche Funktion ist
Hier der Koeffizient EIN ist die Amplitude, xÖyÖ ist das Zentrum und σx, σy sind die x und y Spreads des Blobs. Die Abbildung rechts wurde mit erstellt EIN = 1, xÖ = 0, yÖ = 0, σx = σy = 1.
Das Volumen unter der Gaußschen Funktion ist gegeben durch
Im Allgemeinen wird eine zweidimensionale elliptische Gaußsche Funktion ausgedrückt als
wo die Matrix
ist positiv-definitiv.
Mit dieser Formulierung kann die Abbildung rechts mit erstellt werden EIN = 1, (xÖ, yÖ) = (0, 0), ein = c = 1/2, b = 0.
Bedeutung der Parameter für die allgemeine Gleichung[edit]
Für die allgemeine Form der Gleichung der Koeffizient EIN ist die Höhe des Gipfels und (xÖ, yÖ) ist die Mitte des Blobs.
Wenn wir setzen
dann drehen wir den Blob im Uhrzeigersinn
(Umdrehen gegen den Uhrzeigersinn invertieren Sie die Zeichen in der b Koeffizient).[3] Dies ist in den folgenden Beispielen zu sehen:
Mit dem folgenden Oktavcode kann man leicht sehen, wie sich das Ändern der Parameter auswirkt
Solche Funktionen werden häufig in der Bildverarbeitung und in Rechenmodellen der visuellen Systemfunktion verwendet – siehe Artikel über Skalenraum und affine shn.
Siehe auch multivariate Normalverteilung.
Gaußsche oder Super-Gaußsche Funktion höherer Ordnung[edit]
Eine allgemeinere Formulierung einer Gaußschen Funktion mit einem Flat-Top- und einem Gaußschen Abfall kann durch Erhöhen des Inhalts des Exponenten auf eine Potenz erfolgen.
::
Diese Funktion ist als Super-Gauß-Funktion bekannt und wird häufig für die Gauß-Strahlformulierung verwendet.[4] In einer zweidimensionalen Formulierung folgt eine Gaußsche Funktion
und
kann mit potenziell unterschiedlichen kombiniert werden
und
um eine elliptische Gaußsche Verteilung zu bilden,
oder eine rechteckige Gaußsche Verteilung,
.[5]
Mehrdimensionale Gaußsche Funktion[edit]
In einem (n
-dimensionaler Raum, als den eine Gaußsche Funktion definiert werden kann
wo
ist eine Spalte von
Koordinaten,
ist eine positiv-definitive
Matrix und
bezeichnet die Matrixtransposition.
Das Integral dieser Gaußschen Funktion über das Ganze
-dimensionaler Raum ist gegeben als
Sie kann leicht durch Diagonalisierung der Matrix berechnet werden
und Ändern der Integrationsvariablen in die Eigenvektoren von
.
Allgemeiner wird eine verschobene Gaußsche Funktion definiert als
wo
ist der Verschiebungsvektor und die Matrix
kann als symmetrisch angenommen werden,
und positiv-definitiv. Die folgenden Integrale mit dieser Funktion können mit derselben Technik berechnet werden:
Schätzung von Parametern[edit]
Eine Reihe von Feldern wie Sternphotometrie, Gaußsche Strahlcharakterisierung und Emissions- / Absorptionslinienspektroskopie arbeiten mit abgetasteten Gaußschen Funktionen und müssen die Höhen-, Positions- und Breitenparameter der Funktion genau abschätzen. Es gibt drei unbekannte Parameter für eine 1D-Gauß-Funktion (ein, b, c) und fünf für eine 2D-Gauß-Funktion
.
Die gebräuchlichste Methode zur Schätzung der Gaußschen Parameter besteht darin, den Logarithmus der Daten zu nehmen und eine Parabel an den resultierenden Datensatz anzupassen.[6][7] Während dies ein einfaches Kurvenanpassungsverfahren bereitstellt, kann der resultierende Algorithmus durch übermäßige Gewichtung kleiner Datenwerte verzerrt werden, was zu großen Fehlern bei der Profilschätzung führen kann. Man kann dieses Problem teilweise durch eine Schätzung der gewichteten kleinsten Quadrate kompensieren und das Gewicht kleiner Datenwerte reduzieren, aber auch dies kann verzerrt werden, indem man zulässt, dass der Schwanz des Gaußschen die Anpassung dominiert. Um die Verzerrung zu beseitigen, kann stattdessen ein iterativ neu gewichtetes Verfahren der kleinsten Quadrate verwendet werden, bei dem die Gewichte bei jeder Iteration aktualisiert werden.[7]
Es ist auch möglich, eine nichtlineare Regression direkt an den Daten durchzuführen, ohne die logarithmische Datentransformation einzubeziehen. Weitere Optionen finden Sie unter Anpassen der Wahrscheinlichkeitsverteilung.
Parametergenauigkeit[edit]
Sobald man einen Algorithmus zum Schätzen der Gaußschen Funktionsparameter hat, ist es auch wichtig zu wissen, wie genau diese Schätzungen sind. Jeder Schätzalgorithmus für kleinste Quadrate kann numerische Schätzungen für die Varianz jedes Parameters liefern (dh die Varianz der geschätzten Höhe, Position und Breite der Funktion). Man kann auch die Cramér-Rao-gebundene Theorie verwenden, um einen analytischen Ausdruck für die Untergrenze der Parametervarianzen zu erhalten, wenn bestimmte Annahmen über die Daten gegeben sind.[8][9]
Das Rauschen im gemessenen Profil ist entweder iid Gaußsch oder das Rauschen ist Poisson-verteilt.
Der Abstand zwischen jeder Abtastung (dh der Abstand zwischen Pixeln, die die Daten messen) ist gleichmäßig.
Der Peak ist “gut abgetastet”, so dass weniger als 10% der Fläche oder des Volumens unter dem Peak (Fläche bei einem 1D-Gaußschen, Volumen bei einem 2D-Gaußschen) außerhalb des Messbereichs liegen.
Die Breite des Peaks ist viel größer als der Abstand zwischen den Probenorten (dh die Detektorpixel müssen mindestens fünfmal kleiner sein als das Gaußsche FWHM).
Wenn diese Annahmen erfüllt sind, wird die folgende Kovarianzmatrix K. gilt für die 1D-Profilparameter
,
, und
unter iid Gaußschem Rauschen und unter Poisson-Rauschen:[8]
wo
ist die Breite der Pixel, die zum Abtasten der Funktion verwendet werden.
ist die Quanteneffizienz des Detektors und
gibt die Standardabweichung des Messrauschens an. Somit sind die einzelnen Varianzen für die Parameter im Fall des Gaußschen Rauschens
und im Poisson-Rauschfall
Für die 2D-Profilparameter unter Angabe der Amplitude
Position
und Breite
Für das Profil gelten die folgenden Kovarianzmatrizen:[9]
wobei die einzelnen Parametervarianzen durch die diagonalen Elemente der Kovarianzmatrix gegeben sind.
Diskreter Gaußscher[edit]
Man kann nach einem diskreten Analogon zum Gaußschen fragen; Dies ist bei diskreten Anwendungen erforderlich, insbesondere bei der digitalen Signalverarbeitung. Eine einfache Antwort besteht darin, den kontinuierlichen Gaußschen Kern abzutasten und den abgetasteten Gaußschen Kern zu erhalten. Diese diskrete Funktion weist jedoch nicht die diskreten Analoga der Eigenschaften der kontinuierlichen Funktion auf und kann zu unerwünschten Effekten führen, wie in der Raumimplementierung im Artikelmaßstab beschrieben.
Ein alternativer Ansatz ist die Verwendung des diskreten Gaußschen Kernels:[10]











 (die Normalisierungskonstante), und in diesem Fall ist der Gaußsche Wert die Wahrscheinlichkeitsdichtefunktion einer normalverteilten Zufallsvariablen mit dem erwarteten Wert
(die Normalisierungskonstante), und in diesem Fall ist der Gaußsche Wert die Wahrscheinlichkeitsdichtefunktion einer normalverteilten Zufallsvariablen mit dem erwarteten Wert 

 . Das Produkt zweier Gaußscher Wahrscheinlichkeitsdichtefunktionen (PDFs) ist jedoch im Allgemeinen kein Gaußsches PDF.
. Das Produkt zweier Gaußscher Wahrscheinlichkeitsdichtefunktionen (PDFs) ist jedoch im Allgemeinen kein Gaußsches PDF.
 ,
,  .[2] So funktioniert insbesondere der Gaußsche mit
.[2] So funktioniert insbesondere der Gaußsche mit  werden durch die Fourier-Transformation festgehalten (sie sind Eigenfunktionen der Fourier-Transformation mit Eigenwert 1). Eine physikalische Realisierung ist die des Beugungsmusters: Beispielsweise ist ein fotografischer Objektträger, dessen Durchlässigkeit eine Gaußsche Variation aufweist, auch eine Gaußsche Funktion.
werden durch die Fourier-Transformation festgehalten (sie sind Eigenfunktionen der Fourier-Transformation mit Eigenwert 1). Eine physikalische Realisierung ist die des Beugungsmusters: Beispielsweise ist ein fotografischer Objektträger, dessen Durchlässigkeit eine Gaußsche Variation aufweist, auch eine Gaußsche Funktion.












![links[{begin{matrix}a&b\b&cend{matrix}}right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/74769e46229529b2f5710c4abe3c8906984fe35f)
![{ displaystyle { begin {align} a & = { frac { cos ^ {2} theta} {2 sigma _ {X} ^ {2}}} + { frac { sin ^ {2} Theta} {2 sigma _ {Y} ^ {2}}} \[4pt]b & = - { frac { sin 2 theta} {4 sigma _ {X} ^ {2}}} + { frac { sin 2 theta} {4 sigma _ {Y} ^ {2} }} \[4pt]c & = { frac { sin ^ {2} theta} {2 sigma _ {X} ^ {2}}} + { frac { cos ^ {2} theta} {2 sigma _ {Y. } ^ {2}}} end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a241e96822ff764a31d3bbd73ecae21767f29db7)
 (Umdrehen gegen den Uhrzeigersinn invertieren Sie die Zeichen in der b Koeffizient).[3] Dies ist in den folgenden Beispielen zu sehen:
(Umdrehen gegen den Uhrzeigersinn invertieren Sie die Zeichen in der b Koeffizient).[3] Dies ist in den folgenden Beispielen zu sehen:
 ::
::

 und
und  kann mit potenziell unterschiedlichen kombiniert werden
kann mit potenziell unterschiedlichen kombiniert werden  und
und  um eine elliptische Gaußsche Verteilung zu bilden,
um eine elliptische Gaußsche Verteilung zu bilden, oder eine rechteckige Gaußsche Verteilung,
oder eine rechteckige Gaußsche Verteilung,  .[5]
.[5] -dimensionaler Raum, als den eine Gaußsche Funktion definiert werden kann
-dimensionaler Raum, als den eine Gaußsche Funktion definiert werden kann

 ist eine Spalte von
ist eine Spalte von  ist eine positiv-definitive
ist eine positiv-definitive  Matrix und
Matrix und  bezeichnet die Matrixtransposition.
bezeichnet die Matrixtransposition.


 ist der Verschiebungsvektor und die Matrix
ist der Verschiebungsvektor und die Matrix  und positiv-definitiv. Die folgenden Integrale mit dieser Funktion können mit derselben Technik berechnet werden:
und positiv-definitiv. Die folgenden Integrale mit dieser Funktion können mit derselben Technik berechnet werden:
![{ displaystyle { begin {align} & int _ { mathbb {R} ^ {n}} e ^ {- x ^ {T} Cx + v ^ {T} x} , dx = { sqrt { frac { pi ^ {n}} { det {C}}} exp left ({ frac {1} {4}} v ^ {T} C ^ {- 1} v right) äquiv. { mathcal {M}} ;. \[6pt]& int _ { mathbb {R} ^ {n}} e ^ {- x ^ {T} Cx + v ^ {T} x} left (a ^ {T} x right) , dx = ( a ^ {T} u) cdot { mathcal {M}} ;, { text {where}} u = { frac {1} {2}} C ^ {- 1} v ;. \[6pt]& int _ { mathbb {R} ^ {n}} e ^ {- x ^ {T} Cx + v ^ {T} x} (x ^ {T} Dx) , dx = left (u ^ {T} Du + { frac {1} {2}} operatorname {tr} (DC ^ {- 1}) right) cdot { mathcal {M}} ;. \[6pt]& int _ { mathbb {R} ^ {n}} e ^ {- x ^ {T} C'x + s '^ {T} x} left (- { frac { partiell} { partiell x}} Lambda { frac { teilweise} { teilweise x}} rechts) e ^ {- x ^ {T} Cx + s ^ {T} x} , dx \[6pt]= {} & left (2 operatorname {tr} (C ' Lambda CB ^ {- 1}) + 4u ^ {T} C' Lambda Cu-2u ^ {T} (C ' Lambda s + C. Lambda s ') + s' ^ {T} Lambda s rechts) cdot { mathcal {M}} ;, \[6pt]& { text {where}} u = { frac {1} {2}} B ^ {- 1} v, v = s + s ', B = C + C' ;. end {align}} }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/806a262b270930852d8282ae282e0b9643e413c7)
 .
.
 ,
,  , und
, und 
 ist die Breite der Pixel, die zum Abtasten der Funktion verwendet werden.
ist die Breite der Pixel, die zum Abtasten der Funktion verwendet werden.  ist die Quanteneffizienz des Detektors und
ist die Quanteneffizienz des Detektors und  gibt die Standardabweichung des Messrauschens an. Somit sind die einzelnen Varianzen für die Parameter im Fall des Gaußschen Rauschens
gibt die Standardabweichung des Messrauschens an. Somit sind die einzelnen Varianzen für die Parameter im Fall des Gaußschen Rauschens


 Position
Position  und Breite
und Breite  Für das Profil gelten die folgenden Kovarianzmatrizen:[9]
Für das Profil gelten die folgenden Kovarianzmatrizen:[9]![{ displaystyle { begin {align} mathbf {K} _ { text {Gauss}} = { frac { sigma ^ {2}} { pi delta _ {X} delta _ {Y} Q. ^ {2}}} & { begin {pmatrix} { frac {2} { sigma _ {X} sigma _ {Y}}} & 0 & 0 & { frac {-1} {A sigma _ {Y} }} & { frac {-1} {A sigma _ {X}}} \ 0 & { frac {2 sigma _ {X}} {A ^ {2} sigma _ {Y}}} & 0 & 0 & 0 \ 0 & 0 & { frac {2 sigma _ {Y}} {A ^ {2} sigma _ {X}}} & 0 & 0 \ { frac {-1} {A sigma _ {y}}} & 0 & 0 & { frac {2 sigma _ {X}} {A ^ {2} sigma _ {y}}} & 0 \ { frac {-1} {A sigma _ {X}}} & 0 & 0 & 0 & { frac {2 sigma _ {Y}} {A ^ {2} sigma _ {X}}} end {pmatrix}} \[6pt] mathbf {K} _ { operatorname {Poisson}} = { frac {1} {2 pi}} & { begin {pmatrix} { frac {3A} { sigma _ {X} sigma _ { Y}}} & 0 & 0 & { frac {-1} { sigma _ {Y}}} & { frac {-1} { sigma _ {X}}} \ 0 & { frac { sigma _ {X. }} {A sigma _ {Y}}} & 0 & 0 & 0 \ 0 & 0 & { frac { sigma _ {Y}} {A sigma _ {X}}} & 0 & 0 \ { frac {-1} { sigma _ {Y}}} & 0 & 0 & { frac {2 sigma _ {X}} {3A sigma _ {Y}}} & { frac {1} {3A}} \ { frac {-1} { sigma _ {X}}} & 0 & 0 & { frac {1} {3A}} & { frac {2 sigma _ {Y}} {3A sigma _ {X}}} end {pmatrix}}. Ende {ausgerichtet}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/88d7837b0c037778c88a008a126cac8565659a4e)

Recent Comments