Bogenlänge – Wikipedia
Entfernung entlang einer Kurve


Bei Gleichrichtung ergibt die Kurve ein gerades Liniensegment mit der gleichen Länge wie die Bogenlänge der Kurve.


Bogenlänge ist der Abstand zwischen zwei Punkten entlang eines Kurvenabschnitts.
Das Bestimmen der Länge eines unregelmäßigen Bogensegments wird auch genannt Berichtigung einer Kurve. Das Aufkommen der Infinitesimalrechnung führte zu einer allgemeinen Formel, die in einigen Fällen geschlossene Lösungen liefert.
Allgemeiner Ansatz[edit]

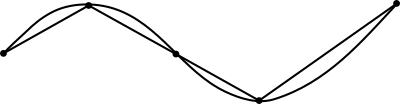
Eine Kurve in der Ebene kann durch Verbinden von a angenähert werden endlich Anzahl der Punkte auf der Kurve mithilfe von Liniensegmenten, um einen polygonalen Pfad zu erstellen. Da es einfach ist, die Länge jedes linearen Segments zu berechnen (z. B. unter Verwendung des Satzes von Pythagoras im euklidischen Raum), kann die Gesamtlänge der Approximation durch Summieren der Längen jedes linearen Segments ermittelt werden. Diese Annäherung ist bekannt als die (kumulative) Akkordentfernung.[1]
Wenn die Kurve noch kein polygonaler Pfad ist, führt die Verwendung einer zunehmend größeren Anzahl von Segmenten kleinerer Länge zu besseren Annäherungen. Die Längen der aufeinanderfolgenden Näherungen nehmen nicht ab und können unbegrenzt weiter zunehmen, aber für glatte Kurven tendieren sie zu einer endlichen Grenze, wenn die Längen der Segmente beliebig klein werden.
Für einige Kurven gibt es eine kleinste Zahl
L.{ displaystyle L}das ist eine Obergrenze für die Länge einer polygonalen Näherung. Diese Kurven werden aufgerufen behebbar und die Nummer
L.{ displaystyle L}

ist definiert als die Bogenlänge.
Definition für eine glatte Kurve[edit]
Lassen
f::[a,b]→R.n{ displaystyle f Doppelpunkt [a,b] to mathbb {R} ^ {n}}eine kontinuierlich differenzierbare Funktion sein. Die Länge der Kurve definiert durch
f{ displaystyle f}
![{ displaystyle f Doppelpunkt [a,b] to mathbb {R} ^ {n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4384ee07c2e449e026d0e76da4d1dce99f3658cd)
kann als die Grenze der Summe der Liniensegmentlängen für eine reguläre Partition von definiert werden
[a,b]{ displaystyle [a,b]}}

wenn sich die Anzahl der Segmente der Unendlichkeit nähert. Das heisst

![[a,b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)
- L.((f)=limN.→∞∑ich=1N.|f((tich)– –f((tich– –1)|{ displaystyle L (f) = lim _ {N to infty} sum _ {i = 1} ^ {N} { bigg |} f (t_ {i}) – f (t_ {i-1 }) { bigg |}}


wo
tich=ein+ich((b– –ein)/.N.=ein+ichΔt{ displaystyle t_ {i} = a + i (ba) / N = a + i Delta t}zum
ich=0,1,…,N..{ displaystyle i = 0,1, dotsc, N.}

Diese Definition entspricht der Standarddefinition der Bogenlänge als Integral:


- ∑ich=1N.|f((tich)– –f((tich– –1)Δt|Δt– –∑ich=1N.|f‘((tich)|Δt{ displaystyle sum _ {i = 1} ^ {N} left | { frac {f (t_ {i}) – f (t_ {i-1})} { Delta t}} right | Delta t- sum _ {i = 1} ^ {N} { Big |} f ‘(t_ {i}) { Big |} Delta t}


hat einen absoluten Wert kleiner als
ϵ((b– –ein){ displaystyle epsilon (ba)}zum
N.>((b– –ein)/.δ((ϵ).{ displaystyle N> (ba) / delta ( epsilon).}

N.→∞,{ displaystyle N rightarrow infty,}


Der linke Term oben entspricht dem rechten Term, der nur das Riemannsche Integral von ist
L.((f)=sup∑ich=1N.|f((tich)– –f((tich– –1)|{ displaystyle L (f) = sup sum _ {i = 1} ^ {N} { bigg |} f (t_ {i}) – f (t_ {i-1}) { bigg |}}



wo das Supremum alle möglichen Partitionen übernommen wird
ein=t0<t1<⋯<tN.– –1<tN.=b{ displaystyle a = t_ {0}

[2] Diese Definition gilt auch, wenn
f{ displaystyle f}
![{ displaystyle [a,b].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3ba5cb29655f824ce80a0b6a32d9326d0e8742cd)
ist nur kontinuierlich, nicht differenzierbar.
Eine Kurve kann auf unendlich viele Arten parametrisiert werden. Lassen
φ::[a,b]→[c,d]{ displaystyle varphi:[a,b]zu [c,d]}}jede kontinuierlich differenzierbare Bijektion sein. Dann
G=f∘φ– –1::[c,d]→R.n{ displaystyle g = f circ varphi ^ {- 1}:[c,d] to mathbb {R} ^ {n}}
![{ displaystyle varphi:[a,b]zu [c,d]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3293091d7865361d0748a12bbb33ea442e32ba87)
ist eine weitere kontinuierlich differenzierbare Parametrisierung der ursprünglich durch definierten Kurve
f.{ displaystyle f.}
![{ displaystyle g = f circ varphi ^ {- 1}:[c,d] to mathbb {R} ^ {n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cf785b379b7ae9d54bdbc6c626151ae0a0210818)
Die Bogenlänge der Kurve ist unabhängig von der zur Definition der Kurve verwendeten Parametrierung gleich:




Wenn eine planare Kurve in
R.2{ displaystyle mathbb {R} ^ {2}}wird durch die Gleichung definiert
y=f((x),{ displaystyle y = f (x),}

wo
f{ displaystyle f}

ist kontinuierlich differenzierbar, dann ist es einfach ein Sonderfall einer parametrischen Gleichung wo
x=t{ displaystyle x = t}und
s=∫einb1+((dydx)2dx.{ displaystyle s = int _ {a} ^ {b} { sqrt {1+ left ({ frac {dy} {dx}} right) ^ {2}}} dx.}



Kurven mit geschlossenen Lösungen für die Bogenlänge umfassen die Oberleitung, den Kreis, die Zykloide, die logarithmische Spirale, die Parabel, die semikubische Parabel und die gerade Linie. Das Fehlen einer geschlossenen Lösung für die Bogenlänge eines elliptischen und hyperbolischen Bogens führte zur Entwicklung der elliptischen Integrale.
Numerische Integration[edit]
In den meisten Fällen, einschließlich einfacher Kurven, gibt es keine geschlossenen Lösungen für die Bogenlänge, und eine numerische Integration ist erforderlich. Die numerische Integration des Bogenlängenintegrals ist normalerweise sehr effizient. Betrachten Sie beispielsweise das Problem, die Länge eines Viertels des Einheitskreises durch numerische Integration des Bogenlängenintegrals zu ermitteln. Die obere Hälfte des Einheitskreises kann als parametriert werden
y=1– –x2.{ displaystyle y = { sqrt {1-x ^ {2}}}.}Das Intervall
x∈[−2/2,2/2]{ displaystyle x in [-{sqrt {2}}/2,{sqrt {2}}/2]}}

entspricht einem Viertel des Kreises. Schon seit
dy/.dx=– –x/.1– –x2{ displaystyle dy / dx = -x / { sqrt {1-x ^ {2}}}}
![{ displaystyle x in [-{sqrt {2}}/2,{sqrt {2}}/2]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2d068143977ed8e9ac6792c86d0157adf47eefd1)
und
1+((dy/.dx)2=1/.((1– –x2),{ displaystyle 1+ (dy / dx) ^ {2} = 1 / (1-x ^ {2}),}

Die Länge eines Viertels des Einheitskreises beträgt


- ∫– –2/.22/.211– –x2dx.{ displaystyle int _ {- { sqrt {2}} / 2} ^ {{ sqrt {2}} / 2} { frac {1} { sqrt {1-x ^ {2}}} , dx.}


Die 15-Punkte-Gauß-Kronrod-Regelschätzung für dieses Integral von 1,570796326808177 unterscheidet sich von der wahren Länge von
- [arcsinx]– –2/.22/.2=π2{ displaystyle { Big [}arcsin x{Big ]} _ {- { sqrt {2}} / 2} ^ {{ sqrt {2}} / 2} = { frac { pi} {2}}}

![{ displaystyle { Big [}arcsin x{Big ]} _ {- { sqrt {2}} / 2} ^ {{ sqrt {2}} / 2} = { frac { pi} {2}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3277bbc045455df9800d1258b0cbdb09a0c7cbe5)
durch 1.3×10−11 und die 16-Punkt-Gaußsche Quadraturregelschätzung von 1,570796326794727 unterscheidet sich von der wahren Länge nur um 1.7×10−13. Dies bedeutet, dass es möglich ist, dieses Integral mit nur 16 Integrandenbewertungen nahezu maschinengenau zu bewerten.
Kurve auf einer Oberfläche[edit]
Lassen
x((u,v){ displaystyle mathbf {x} (u, v)}eine Oberflächenabbildung sein und lassen
D.((x∘C.)=((xu xv)((u‘v‘)=xuu‘+xvv‘.{ displaystyle D ( mathbf {x} circ mathbf {C}) = ( mathbf {x} _ {u} mathbf {x} _ {v}) { binom {u ‘} {v’ }} = mathbf {x} _ {u} u ‘+ mathbf {x} _ {v} v’.}



Die quadratische Norm dieses Vektors ist
((xuu‘+xvv‘)⋅((xuu‘+xvv‘)=G11((u‘)2+2G12u‘v‘+G22((v‘)2{ displaystyle ( mathbf {x} _ {u} u ‘+ mathbf {x} _ {v} v’) cdot ( mathbf {x} _ {u} u ‘+ mathbf {x} _ { v} v ‘) = g_ {11} (u’) ^ {2} + 2g_ {12} u’v ‘+ g_ {22} (v’) ^ {2}}(wo
Gichj{ displaystyle g_ {ij}}

ist der erste Grundformkoeffizient), so dass der Integrand des Bogenlängenintegrals wie folgt geschrieben werden kann
Geinb((uein)‘((ub)‘{ displaystyle { sqrt {g_ {ab} (u ^ {a}) ‘(u ^ {b})’}}}

(wo
u1=u{ displaystyle u ^ {1} = u}

und
u2=v{ displaystyle u ^ {2} = v}

).


Andere Koordinatensysteme[edit]
Lassen
x((r,θ)=((rcosθ,rSündeθ).{ displaystyle mathbf {x} (r, theta) = (r cos theta, r sin theta).}

Der Integrand des Bogenlängenintegrals ist
((xr⋅xr)((r‘)2+2((xr⋅xθ)r‘θ‘+((xθ⋅xθ)((θ‘)2=((r‘)2+r2((θ‘)2.{ displaystyle ( mathbf {x_ {r}} cdot mathbf {x_ {r}}) (r ‘) ^ {2} +2 ( mathbf {x} _ {r} cdot mathbf {x} _ { theta}) r ‘ theta’ + ( mathbf {x} _ { theta} cdot mathbf {x} _ { theta}) ( theta ‘) ^ {2} = (r’) ^ {2} + r ^ {2} ( theta ‘) ^ {2}.}

Für eine in Polarkoordinaten ausgedrückte Kurve beträgt die Bogenlänge
- ∫t1t2((drdt)2+r2((dθdt)2dt=∫θ((t1)θ((t2)((drdθ)2+r2dθ.{ displaystyle int _ {t_ {1}} ^ {t_ {2}} { sqrt { left ({ frac {dr} {dt}} right) ^ {2} + r ^ {2} links ({ frac {d theta} {dt}} rechts) ^ {2}}} dt = int _ { theta (t_ {1})} ^ { theta (t_ {2})} { sqrt { left ({ frac {dr} {d theta}} right) ^ {2} + r ^ {2}}} d theta.}


Nun lass
x((r,θ,ϕ)=((rSündeθcosϕ,rSündeθSündeϕ,rcosθ).{ displaystyle mathbf {x} (r, theta, phi) = (r sin theta cos phi, r sin theta sin phi, r cos theta).}

Die erneute Verwendung der Kettenregel zeigt dies
D.((x∘C.)=xrr‘+xθθ‘+xϕϕ‘.{ displaystyle D ( mathbf {x} circ mathbf {C}) = mathbf {x} _ {r} r ‘+ mathbf {x} _ { theta} theta’ + mathbf {x} _ { phi} phi ‘.}Alle Punktprodukte
xich⋅xj{ displaystyle mathbf {x} _ {i} cdot mathbf {x} _ {j}}

wo
ich{ displaystyle i}

und
j{ displaystyle j}

differ sind Null, also ist die quadratische Norm dieses Vektors


- ((xr⋅xr)((r‘2)+((xθ⋅xθ)((θ‘)2+((xϕ⋅xϕ)((ϕ‘)2=((r‘)2+r2((θ‘)2+r2Sünde2θ((ϕ‘)2.{ displaystyle ( mathbf {x} _ {r} cdot mathbf {x} _ {r}) (r ‘^ {2}) + ( mathbf {x} _ { theta} cdot mathbf { x} _ { theta}) ( theta ‘) ^ {2} + ( mathbf {x} _ { phi} cdot mathbf {x} _ { phi}) ( phi’) ^ {2 } = (r ‘) ^ {2} + r ^ {2} ( theta’) ^ {2} + r ^ {2} sin ^ {2} theta ( phi ‘) ^ {2}.}


Für eine in sphärischen Koordinaten ausgedrückte Kurve beträgt die Bogenlänge also
- ∫t1t2((drdt)2+r2((dθdt)2+r2Sünde2θ((dϕdt)2dt.{ displaystyle int _ {t_ {1}} ^ {t_ {2}} { sqrt { left ({ frac {dr} {dt}} right) ^ {2} + r ^ {2} links ({ frac {d theta} {dt}} rechts) ^ {2} + r ^ {2} sin ^ {2} theta links ({ frac {d phi} {dt}} right) ^ {2}}} dt.}


Eine sehr ähnliche Berechnung zeigt, dass die Bogenlänge einer Kurve, ausgedrückt in Zylinderkoordinaten, ist
- ∫t1t2((drdt)2+r2((dθdt)2+((dzdt)2dt.{ displaystyle int _ {t_ {1}} ^ {t_ {2}} { sqrt { left ({ frac {dr} {dt}} right) ^ {2} + r ^ {2} links ({ frac {d theta} {dt}} rechts) ^ {2} + links ({ frac {dz} {dt}} rechts) ^ {2}}} dt.}


Einfache Fälle[edit]
Kreisbögen[edit]
Bogenlängen sind mit gekennzeichnet s, da das lateinische Wort für Länge (oder Größe) ist Spatium.
In den folgenden Zeilen wird
r{ displaystyle r}stellt den Radius eines Kreises dar,
d{ displaystyle d}

ist sein Durchmesser,
C.{ displaystyle C}

ist sein Umfang,
s{ displaystyle s}

ist die Länge eines Kreisbogens und
θ{ displaystyle theta}

ist der Winkel, den der Bogen in der Mitte des Kreises einschließt. Die Entfernungen
r,d,C.,{ displaystyle r, d, C,}

und
s{ displaystyle s}

werden in den gleichen Einheiten ausgedrückt.
C.=2πr,{ displaystyle C = 2 pi r,} das ist das gleiche wie C.=πd.{ displaystyle C = pi d.} Diese Gleichung ist eine Definition von π.{ displaystyle pi.}- Wenn der Bogen ein Halbkreis ist, dann
s=πr.{ displaystyle s = pi r.} - Für einen beliebigen Kreisbogen:
- Wenn
θ{ displaystyle theta} ist dann im Bogenmaß s=rθ.{ displaystyle s = r theta.} Dies ist eine Definition des Bogenmaßes. - Wenn
θ{ displaystyle theta} ist dann in Grad s=πrθ180 Grad,{ displaystyle s = { frac { pi r theta} {180 { text {deg}}}},} das ist das gleiche wie s=C.θ360 Grad.{ displaystyle s = { frac {C theta} {360 { text {deg}}}.} - Wenn
θ{ displaystyle theta} ist in Absolventen (100 Absolventen oder Noten oder Absolventen sind ein rechter Winkel), dann s=πrθ200 grad,{ displaystyle s = { frac { pi r theta} {200 { text {grad}}}},} das ist das gleiche wie s=C.θ400 grad.{ displaystyle s = { frac {C theta} {400 { text {grad}}}}.} - Wenn
θ{ displaystyle theta} ist in Umdrehungen (eine Umdrehung ist eine vollständige Umdrehung oder 360 ° oder 400 Grad oder 2π{ displaystyle 2 pi} Bogenmaß) s=C.θ/.Wende{ displaystyle s = C theta / { text {turn}}} .
- Wenn




















Bögen großer Kreise auf der Erde[edit]
Ursprünglich wurden zwei Längeneinheiten, die Seemeile und der Meter (oder Kilometer), so definiert, dass die Länge der Bögen großer Kreise auf der Erdoberfläche einfach numerisch mit den Winkeln in Beziehung steht, die sie in ihrem Zentrum bilden. Die einfache Gleichung
s=θ{ displaystyle s = theta}gilt unter folgenden Umständen:


-
- wenn
s{ displaystyle s} ist in Seemeilen, und θ{ displaystyle theta} ist in Bogenminuten (1⁄60 Abschluss) oder - wenn
s{ displaystyle s} ist in Kilometern und θ{ displaystyle theta} ist in Zentigrades (1⁄100 grad).
- wenn
Die Längen der Abstandseinheiten wurden so gewählt, dass der Erdumfang gleich ist 40000 Kilometer oder 21600 Seemeilen. Dies sind die Zahlen der entsprechenden Winkeleinheiten in einer vollständigen Umdrehung.
Diese Definitionen des Zählers und der Seemeile wurden durch genauere ersetzt, aber die ursprünglichen Definitionen sind für konzeptionelle Zwecke und einige Berechnungen immer noch genau genug. Zum Beispiel implizieren sie, dass ein Kilometer genau 0,54 Seemeilen entspricht. Nach offiziellen modernen Definitionen beträgt eine Seemeile genau 1,852 Kilometer.[3] was bedeutet, dass 1 Kilometer ungefähr ist 0,53995680 Seemeilen.[4] Dieses moderne Verhältnis unterscheidet sich von dem aus den ursprünglichen Definitionen berechneten um weniger als einen Teil von 10.000.
Länge eines Parabelbogens[edit]
Historische Methoden[edit]
Antike[edit]
Für einen Großteil der Geschichte der Mathematik hielten es selbst die größten Denker für unmöglich, die Länge eines unregelmäßigen Bogens zu berechnen. Obwohl Archimedes Pionierarbeit geleistet hatte, um mit ihm den Bereich unter einer Kurve zu finden “Methode der Erschöpfung”Nur wenige glaubten, dass Kurven sogar bestimmte Längen haben könnten, ebenso wie gerade Linien. Der erste Grund wurde auf diesem Gebiet, wie es oft im Kalkül der Fall war, durch Annäherung gebrochen. Die Leute fingen an, Polygone in die Kurven einzuschreiben und die Länge der Seiten für eine etwas genaue Messung der Länge zu berechnen. Durch die Verwendung von mehr Segmenten und die Verringerung der Länge jedes Segments konnten sie eine immer genauere Annäherung erhalten. Insbesondere durch Einschreiben eines Polygons mit vielen Seiten in einen Kreis konnten sie ungefähre Werte von π finden.[5][6]
17. Jahrhundert[edit]
Im 17. Jahrhundert führte die Erschöpfungsmethode zur geometrischen Korrektur mehrerer transzendentaler Kurven: die logarithmische Spirale von Evangelista Torricelli im Jahr 1645 (einige Quellen sagen John Wallis in den 1650er Jahren), die Zykloide von Christopher Wren im Jahr 1658 und die Oberleitung von Gottfried Leibniz im Jahre 1691.
1659 schrieb Wallis William Neiles Entdeckung der ersten Korrektur einer nichttrivialen algebraischen Kurve, der semikubischen Parabel, zu.[7] Die beigefügten Abbildungen finden Sie auf Seite 145. Auf Seite 91 wird William Neile als erwähnt Gulielmus Nelius.
Integrale Form[edit]
Vor der vollständigen formalen Entwicklung des Kalküls wurde die Grundlage für die moderne Integralform für die Bogenlänge von Hendrik van Heuraet und Pierre de Fermat unabhängig entdeckt.
1659 veröffentlichte van Heuraet eine Konstruktion, die zeigte, dass das Problem der Bestimmung der Bogenlänge in das Problem der Bestimmung der Fläche unter einer Kurve (dh eines Integrals) umgewandelt werden konnte. Als Beispiel für seine Methode bestimmte er die Bogenlänge einer semikubischen Parabel, für die der Bereich unter einer Parabel gefunden werden musste.[8] Im Jahr 1660 veröffentlichte Fermat eine allgemeinere Theorie, die das gleiche Ergebnis in seiner enthielt De linearum curvarum cum lineis rectis comparee dissertatio geometrica (Geometrische Dissertation über gekrümmte Linien im Vergleich zu geraden Linien).[9]


Aufbauend auf seiner früheren Arbeit mit Tangenten verwendete Fermat die Kurve
- y=x3/.2{ displaystyle y = x ^ {3/2} ,}


dessen Tangente an x = ein hatte eine Steigung von
- 32ein1/.2{ displaystyle textstyle {3 over 2} a ^ {1/2}}


Die Tangentenlinie hätte also die Gleichung
- y=32ein1/.2((x– –ein)+f((ein).{ displaystyle y = textstyle {3 over 2} {a ^ {1/2}} (xa) + f (a).}


Als nächstes nahm er zu ein um einen kleinen Betrag zu ein + εSegment machen AC eine relativ gute Annäherung für die Länge der Kurve von EIN zu D.. So ermitteln Sie die Länge des Segments ACverwendete er den Satz von Pythagoras:
- EINC.2=EINB.2+B.C.2=ε2+94einε2=ε2((1+94ein){ displaystyle { begin {align} AC ^ {2} & {} = AB ^ {2} + BC ^ {2} \ & {} = textstyle varepsilon ^ {2} + {9 over 4} a varepsilon ^ {2} \ & {} = textstyle varepsilon ^ {2} left (1+ {9 over 4} a right) end {align}}}


was, wenn gelöst, ergibt
- EINC.=ε1+94ein .{ displaystyle AC = textstyle varepsilon { sqrt {1+ {9 over 4} a }}.}


Um die Länge zu approximieren, würde Fermat eine Folge von kurzen Segmenten zusammenfassen.
Kurven mit unendlicher Länge[edit]



Wie oben erwähnt, sind einige Kurven nicht korrigierbar. Das heißt, es gibt keine Obergrenze für die Länge polygonaler Approximationen; Die Länge kann beliebig groß gemacht werden. Informell sollen solche Kurven eine unendliche Länge haben. Es gibt kontinuierliche Kurven, auf denen jeder Bogen (außer einem Einzelpunktbogen) eine unendliche Länge hat. Ein Beispiel für eine solche Kurve ist die Koch-Kurve. Ein weiteres Beispiel für eine Kurve mit unendlicher Länge ist der Graph der durch definierten Funktion f((x) = x Sünde (1 /x) für jede offene Menge mit 0 als einem ihrer Begrenzer und f(0) = 0. Manchmal werden die Hausdorff-Dimension und das Hausdorff-Maß verwendet, um die Größe solcher Kurven zu quantifizieren.
Verallgemeinerung auf (pseudo-) Riemannsche Mannigfaltigkeiten[edit]
Lassen
M.{ displaystyle M}sei eine (pseudo-) Riemannsche Mannigfaltigkeit,
γ::[0,1]→M.{ displaystyle gamma:[0,1] rightarrow M}

eine Kurve in
M.{ displaystyle M}
![{ displaystyle gamma:[0,1] rightarrow M}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e4f535d796622749b40699d49c3dfea3ce1c4907)
und
G{ displaystyle g}der (pseudo-) metrische Tensor.


Die Länge von
γ{ displaystyle gamma}ist definiert als


-
Siehe auch[edit]
Verweise[edit]
Quellen[edit]
- Farouki, Rida T. (1999). “Kurven aus Bewegung, Bewegung aus Kurven”. In Laurent, P.-J.; Sablonniere, P.; Schumaker, LL (Hrsg.). Kurven- und Oberflächendesign: Saint-Malo 1999. Vanderbilt Univ. Drücken Sie. S. 63–90. ISBN 978-0-8265-1356-4.
Externe Links[edit]

Wikimedia Commons hat Medien im Zusammenhang mit Bogenlänge. - “Gleichrichtbare Kurve”, Enzyklopädie der Mathematik, EMS Press, 2001 [1994]
- Die Geschichte der Krümmung
- Weisstein, Eric W. “Bogenlänge”. MathWorld.
- Bogenlänge von Ed Pegg Jr., The Wolfram Demonstrations Project, 2007.
- [permanent dead link] Calculus Study Guide – Bogenlänge (Berichtigung)
- Berühmter Kurvenindex Das MacTutor-Archiv zur Geschichte der Mathematik
- Annäherung an die Bogenlänge von Chad Pierson, Josh Fritz und Angela Sharp, The Wolfram Demonstrations Project.
- Länge eines Kurvenversuchs Veranschaulicht die numerische Lösung zum Ermitteln der Länge einer Kurve.

Recent Comments