Winkel – Wikipedia
Figur, die durch zwei Strahlen gebildet wird, die sich an einem gemeinsamen Punkt treffen


In der euklidischen Geometrie ist an Winkel ist die Figur, die von zwei Strahlen gebildet wird, genannt Seiten des Winkels, der einen gemeinsamen Endpunkt hat, der als bezeichnet wird Scheitel des Winkels.[1]
Winkel, die von zwei Strahlen gebildet werden, liegen in der Ebene, die die Strahlen enthält. Winkel werden auch durch den Schnitt zweier Ebenen gebildet. Diese werden Diederwinkel genannt. Zwei sich schneidende Kurven definieren auch einen Winkel, der der Winkel der Tangenten am Schnittpunkt ist. Zum Beispiel ist der Kugelwinkel, der von zwei Großkreisen auf einer Kugel gebildet wird, gleich dem Diederwinkel zwischen den Ebenen, die die Großkreise enthalten.
Winkel wird auch verwendet, um das Maß eines Winkels oder einer Drehung zu bezeichnen. Dieses Maß ist das Verhältnis der Länge eines Kreisbogens zu seinem Radius. Bei einem geometrischen Winkel wird der Bogen am Scheitelpunkt zentriert und von den Seiten begrenzt. Bei einer Drehung wird der Bogen im Mittelpunkt der Drehung zentriert und durch einen beliebigen anderen Punkt und sein Bild durch die Drehung begrenzt.
Geschichte und Etymologie[edit]
Das Wort Winkel kommt vom lateinischen Wort Winkel, was “Ecke” bedeutet; verwandte Wörter sind das Griechische ἀγκύλος (ankylas), was “krumm, gebogen” bedeutet, und das englische Wort “Knöchel”. Beide sind mit der proto-indoeuropäischen Wurzel verbunden *ank-, was “beugen” oder “beugen” bedeutet.[2]
Euklid definiert einen ebenen Winkel als die Neigung zueinander in einer Ebene zweier Linien, die aufeinander treffen und nicht gerade zueinander liegen. Laut Proclus muss ein Winkel entweder eine Qualität oder eine Quantität oder eine Beziehung sein. Der erste Begriff wurde von Eudemus verwendet, der einen Winkel als Abweichung von einer geraden Linie betrachtete; das zweite von Carpus von Antiochia, der es als den Abstand oder Raum zwischen den sich kreuzenden Linien betrachtete; Euklid übernahm das dritte Konzept.[3]
Winkel erkennen[edit]
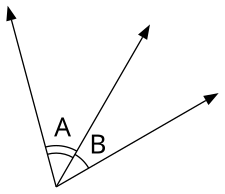
In mathematischen Ausdrücken ist es üblich, griechische Buchstaben (α, β, γ, θ, φ, . . . ) als Variablen, die die Größe eines Winkels angeben (um Verwechslungen mit seiner anderen Bedeutung zu vermeiden, wird das Symbol π wird normalerweise nicht für diesen Zweck verwendet). Römische Kleinbuchstaben (ein, B, C, . . . ) werden ebenso verwendet wie römische Großbuchstaben im Kontext von Polygonen. Beispiele finden Sie in den Abbildungen in diesem Artikel.
In geometrischen Figuren können Winkel auch durch die Beschriftungen identifiziert werden, die an den drei Punkten angebracht sind, die sie definieren. Zum Beispiel wird der Winkel am Scheitelpunkt A, der von den Strahlen AB und AC (dh den Linien von Punkt A zu Punkt B und Punkt A zu Punkt C) eingeschlossen wird, als ∠BAC (in Unicode U+2220 ∠ WINKEL) oder
BEINC^{displaystyle {widehat {rm {BAC}}}}. Wo keine Verwechslungsgefahr besteht, kann der Winkel manchmal einfach mit seinem Scheitelpunkt bezeichnet werden (hier “Winkel A”).


Ein Winkel, der beispielsweise als ∠BAC bezeichnet wird, kann sich potenziell auf einen von vier Winkeln beziehen: den Winkel von B nach C im Uhrzeigersinn, den Winkel von B nach C gegen den Uhrzeigersinn, den Winkel von C nach B im Uhrzeigersinn oder den Winkel von C . gegen den Uhrzeigersinn nach B, wobei die Richtung, in der der Winkel gemessen wird, sein Vorzeichen bestimmt (siehe Positive und negative Winkel). In vielen geometrischen Situationen ist jedoch aus dem Kontext ersichtlich, dass der positive Winkel kleiner oder gleich 180 Grad gemeint ist, wobei in diesem Fall keine Mehrdeutigkeit entsteht. Andernfalls kann eine Konvention übernommen werden, bei der ∠BAC immer den (positiven) Winkel von B nach C gegen den Uhrzeigersinn und ∠CAB den (positiven) Winkel von C nach B gegen den Uhrzeigersinn bezeichnet.
Arten von Winkeln[edit]
Individuelle Winkel[edit]
Es gibt einige gängige Terminologie für Winkel, deren Maß immer nicht negativ ist (siehe § Positive und negative Winkel):[4][5]
- Ein Winkel gleich 0° oder nicht gedreht wird als Nullwinkel bezeichnet.
- Ein Winkel kleiner als ein rechter Winkel (kleiner als 90°) heißt an spitzer Winkel (“akut” bedeutet “scharf”).
- Ein Winkel gleich 1/4 drehen (90° oder π/2 Bogenmaß) heißt a rechter Winkel. Zwei Geraden, die einen rechten Winkel bilden, heißen normal, senkrecht, oder aufrecht.
- Ein Winkel größer als ein rechter Winkel und kleiner als ein gerader Winkel (zwischen 90° und 180°) wird als an . bezeichnet stumpfer Winkel (“stumpf” bedeutet “stumpf”).
- Ein Winkel gleich 1/2 drehen (180° oder π Bogenmaß) heißt a geraden Winkel.
- Ein Winkel größer als ein gerader Winkel aber weniger als 1 Umdrehung (zwischen 180° und 360°) wird als a . bezeichnet überstumpfer Winkel.
- Ein Winkel gleich 1 Umdrehung (360° oder 2 .)π Bogenmaß) heißt a voller Winkel, kompletter Winkel, runder Winkel oder ein perigon.
- Ein Winkel, der kein Vielfaches eines rechten Winkels ist, heißt an schräger Winkel.
Die Namen, Intervalle und Maßeinheiten sind in der folgenden Tabelle aufgeführt:


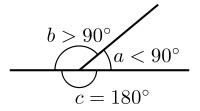
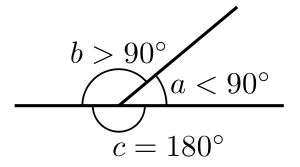
Akut (ein), stumpf (B) und gerade (C) Winkel. Die spitzen und stumpfen Winkel werden auch als schiefe Winkel bezeichnet.

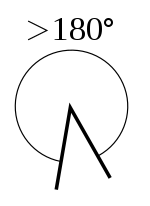
Überstumpfer Winkel
| Name | Null | akut | rechter Winkel | stumpf | gerade | Reflex | perigon | |||
| Einheit | Intervall | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Dreh dich | 0 Umdrehung | (0, 1/4) Dreh dich | 1/4 Dreh dich | (1/4, 1/2) Dreh dich | 1/2 Dreh dich | (1/2, 1 Drehung | 1 Drehung | |||
| im Bogenmaß | 0 rad | (0, 1/2π) rad | 1/2π rad | (1/2π, π) rad | π rad | (π, 2π) rad | 2π rad | |||
| Grad | 0° | (0, 90)° | 90° | (90, 180)° | 180° | (180, 360)° | 360° | |||
| weg | 0g | (0, 100)g | 100g | (100, 200)g | 200g | (200, 400)g | 400g | |||
Äquivalenzwinkelpaare[edit]
- Winkel, die das gleiche Maß (dh den gleichen Betrag) haben, heißen gleich oder kongruent. Ein Winkel wird durch sein Maß definiert und ist nicht von den Längen der Winkelseiten abhängig (zB alle rechte Winkel sind gleich groß).
- Zwei Winkel, die gemeinsame Endseiten haben, sich aber in der Größe um ein ganzzahliges Vielfaches einer Drehung unterscheiden, heißen coterminale Winkel.
- EIN Referenzwinkel ist die spitze Version eines beliebigen Winkels, der durch wiederholtes Subtrahieren oder Addieren eines geraden Winkels bestimmt wird (1/2 drehen, 180°, oder π Radiant), zu den Ergebnissen nach Bedarf, bis die Größe des Ergebnisses ein spitzer Winkel ist, ein Wert zwischen 0 und 1/4 drehen, 90°, oder π/2 Bogenmaß. Ein Winkel von 30 Grad hat beispielsweise einen Referenzwinkel von 30 Grad, und ein Winkel von 150 Grad hat auch einen Referenzwinkel von 30 Grad (180–150). Ein Winkel von 750 Grad hat einen Referenzwinkel von 30 Grad (750–720).[6]
Vertikale und benachbarte Winkelpaare[edit]


Wenn sich zwei Geraden in einem Punkt schneiden, werden vier Winkel gebildet. Paarweise werden diese Winkel nach ihrer Lage zueinander benannt.
- Ein Paar einander gegenüberliegender Winkel, die durch zwei sich schneidende Geraden gebildet werden, die eine “X”-ähnliche Form bilden, werden als bezeichnet vertikale Winkel oder entgegengesetzte Winkel oder vertikal gegenüberliegende Winkel. Sie werden abgekürzt als vert. op. s.[7]
- Die Gleichheit von vertikal entgegengesetzten Winkeln wird als bezeichnet Vertikalwinkelsatz. Eudemus von Rhodos schrieb den Beweis Thales von Milet zu.[8] Der Satz zeigte, dass die vertikalen Winkel gleich groß sind, da beide eines Paares von vertikalen Winkeln die beiden benachbarten Winkel ergänzen. Laut einer historischen Notiz beobachtete Thales bei seinem Besuch in Ägypten, dass die Ägypter jedes Mal, wenn sie zwei sich schneidende Linien zeichneten, die vertikalen Winkel maßen, um sicherzustellen, dass sie gleich waren. Thales kam zu dem Schluss, dass man beweisen könnte, dass alle vertikalen Winkel gleich sind, wenn man einige allgemeine Begriffe akzeptiert wie:
- Alle geraden Winkel sind gleich.
- Gleiches zu Gleichen addiert ist gleich.
- Gleiches, das von Gleichen abgezogen wird, ist gleich.
- Wenn zwei benachbarte Winkel eine Gerade bilden, sind sie ergänzend. Nehmen wir also an, dass das Winkelmaß EIN gleich x, dann das Winkelmaß C wäre 180° − x. Ebenso das Winkelmaß D wäre 180° − x. Beide Winkel C und Winkel D haben Maße gleich 180° − x und sind deckungsgleich. Da Winkel B ist ergänzend zu beiden Winkeln C und D, kann jedes dieser Winkelmaße verwendet werden, um das Maß von Angle . zu bestimmen B. Mit dem Maß eines der beiden Winkel C oder Winkel D, finden wir das Winkelmaß B zu sein 180° − (180° − x) = 180° − 180° + x = x. Daher sind beide Winkel EIN und Winkel B haben Maße gleich x und sind gleich groß.

- Angrenzende Winkel, oft abgekürzt als adj. s, sind Winkel, die einen gemeinsamen Scheitelpunkt und eine gemeinsame Kante haben, aber keine inneren Punkte. Mit anderen Worten, es sind Winkel, die nebeneinander oder benachbart sind und sich einen “Arm” teilen. Benachbarte Winkel, die sich zu einem rechten, geraden oder vollen Winkel summieren, sind speziell und heißen jeweils komplementär, ergänzend und exemplarisch Winkel (siehe § Kombinieren von Winkelpaaren unter).
Eine Transversale ist eine Linie, die ein Paar (oft paralleler) Linien schneidet und mit verbunden ist alternative Innenwinkel, entsprechende Winkel, Innenwinkel, und Außenwinkel.
Kombinieren von Winkelpaaren[edit]
Drei spezielle Winkelpaare beinhalten die Summation von Winkeln:


- Komplementäre Winkel sind Winkelpaare, deren Maße sich zu einem rechten Winkel (1/4 drehen, 90°, oder π/2 Bogenmaß).[11] Wenn die beiden komplementären Winkel benachbart sind, bilden ihre nicht geteilten Seiten einen rechten Winkel. In der euklidischen Geometrie sind die beiden spitzen Winkel in einem rechtwinkligen Dreieck komplementär, da die Summe der Innenwinkel eines Dreiecks 180 Grad beträgt und der rechte Winkel selbst 90 Grad ausmacht.
- Das Adjektiv komplementär stammt aus dem Lateinischen Komplementum, verbunden mit dem Verb vervollständigen, “auffüllen”. Ein spitzer Winkel wird durch seine Ergänzung zu einem rechten Winkel “aufgefüllt”.
- Der Unterschied zwischen einem Winkel und einem rechten Winkel wird als bezeichnet ergänzen des Winkels.[12]
- Wenn Winkel EIN und B komplementär sind, gelten folgende Beziehungen:
- Sünde2EIN+Sünde2B=1cos2EIN+cos2B=1bräunenEIN=KinderbettBSekEIN=cscB{displaystyle {begin{ausgerichtet}&sin ^{2}A+sin^{2}B=1&&cos ^{2}A+cos ^{2}B=1\[3pt]&tan A=cot B&&sec A=csc Bend{ausgerichtet}}}
- (Der Tangens eines Winkels ist gleich dem Kotangens seines Komplements und seine Sekante gleich dem Kosekans seines Komplements.)
- Das Präfix “co-” in den Namen einiger trigonometrischer Verhältnisse bezieht sich auf das Wort “komplementär”.

![{displaystyle {begin{ausgerichtet}&sin ^{2}A+sin^{2}B=1&&cos ^{2}A+cos ^{2}B=1\[3pt]&tan A=cot B&&sec A=csc Bend{ausgerichtet}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/47aa6b35b8e53468f73d7ec051d55371da314fba)

- Zwei Winkel, die sich zu einem geraden Winkel (1/2 drehen, 180°, oder π Bogenmaß) heißen Ergänzungswinkel.[13]
- Wenn die beiden Ergänzungswinkel benachbart sind (dh einen gemeinsamen Scheitel haben und nur eine Seite teilen), bilden ihre nicht geteilten Seiten eine Gerade. Solche Winkel heißen a lineares Winkelpaar. Zusätzliche Winkel müssen jedoch nicht auf derselben Linie liegen und können räumlich getrennt werden. Zum Beispiel sind benachbarte Winkel eines Parallelogramms ergänzend und entgegengesetzte Winkel eines zyklischen Vierecks (einer, dessen Scheitelpunkte alle auf einen einzigen Kreis fallen) sind ergänzend.
- Liegt ein Punkt P außerhalb eines Kreises mit Mittelpunkt O und berühren die Tangenten von P den Kreis an den Punkten T und Q, dann sind ∠TPQ und ∠TOQ ergänzend.
- Die Sinus der Zusatzwinkel sind gleich. Ihre Kosinus und Tangens (sofern nicht undefiniert) sind gleich groß, haben aber entgegengesetzte Vorzeichen.
- In der euklidischen Geometrie ist jede Summe zweier Winkel in einem Dreieck eine Ergänzung zum dritten, da die Summe der Innenwinkel eines Dreiecks ein gerader Winkel ist.

- Zwei Winkel, die sich zu einem vollständigen Winkel summieren (1 Umdrehung, 360° oder 2π Bogenmaß) heißen Exponentialwinkel oder konjugierte Winkel.
- Die Differenz zwischen einem Winkel und einem vollständigen Winkel wird als bezeichnet exemplarisch des Winkels oder konjugieren eines Winkels.
[edit]


- Ein Winkel, der Teil eines einfachen Polygons ist, heißt an Innenwinkel wenn es auf der Innenseite dieses einfachen Polygons liegt. Ein einfaches konkaves Polygon hat mindestens einen Innenwinkel, der ein Reflexwinkel ist.
- In der euklidischen Geometrie addieren sich die Maße der Innenwinkel eines Dreiecks zu π Bogenmaß, 180° oder 1/2 Dreh dich; die Maße der Innenwinkel eines einfachen konvexen Vierecks addieren sich zu 2π Bogenmaß, 360° oder 1 Umdrehung. Im Allgemeinen sind die Maße der Innenwinkel eines einfachen konvexen Vielecks mit n Seiten addieren sich zu (n − 2)π Bogenmaß, oder (n − 2)180 Grad, (n − 2)2 rechte Winkel oder (n − 2)1/2 Dreh dich.
- Die Ergänzung eines Innenwinkels heißt an Außenwinkel, dh ein Innenwinkel und ein Außenwinkel bilden ein lineares Winkelpaar. An jedem Scheitelpunkt des Polygons gibt es zwei Außenwinkel, die jeweils durch die Verlängerung einer der beiden Seiten des Polygons bestimmt werden, die sich am Scheitelpunkt treffen; diese beiden Winkel sind vertikal und daher gleich. Ein Außenwinkel misst die Drehung, die man an einem Scheitelpunkt machen muss, um das Polygon nachzuzeichnen. Wenn der entsprechende Innenwinkel ein Reflexwinkel ist, ist der Außenwinkel als negativ zu betrachten. Sogar in einem nicht einfachen Polygon kann es möglich sein, den Außenwinkel zu definieren, aber man muss eine Orientierung der Ebene (oder Fläche) wählen, um das Vorzeichen des Außenwinkelmaßes zu bestimmen.
- In der euklidischen Geometrie beträgt die Summe der Außenwinkel eines einfachen konvexen Polygons, wenn an jedem Scheitelpunkt nur einer der beiden Außenwinkel angenommen wird, eine volle Drehung (360°). Der Außenwinkel könnte hier a . heißen zusätzlicher Außenwinkel. Außenwinkel werden häufig in Logo Turtle-Programmen verwendet, wenn regelmäßige Polygone gezeichnet werden.
- In einem Dreieck sind die Winkelhalbierenden zweier Außenwinkel und die Winkelhalbierende des anderen Innenwinkels gleichzeitig (treffen sich an einem einzigen Punkt).[16]: P. 149
- In einem Dreieck sind drei Schnittpunkte jeweils einer äußeren Winkelhalbierenden mit der gegenüberliegenden verlängerten Seite kollinear.[16]: P. 149
- In einem Dreieck sind drei Schnittpunkte, zwei davon zwischen einer Innenwinkelhalbierenden und der gegenüberliegenden Seite und der dritte zwischen der anderen Außenwinkelhalbierenden und der gegenüberliegenden verlängerten Seite, kollinear.[16]: P. 149
- Einige Autoren verwenden den Namen Außenwinkel eines einfachen Polygons, um einfach das zu bedeuten Expl. Außenwinkel (nicht Ergänzung!) des Innenwinkels.[17] Dies steht im Widerspruch zur obigen Verwendung.
[edit]
- Der Winkel zwischen zwei Ebenen (z. B. zwei benachbarten Flächen eines Polyeders) heißt a Diederwinkel.[12] Er kann als der spitze Winkel zwischen zwei Linien senkrecht zu den Ebenen definiert werden.
- Der Winkel zwischen einer Ebene und einer sich schneidenden Geraden beträgt neunzig Grad minus dem Winkel zwischen der sich schneidenden Linie und der Linie, die durch den Schnittpunkt verläuft und senkrecht zur Ebene steht.
Winkel messen[edit]
Die Größe eines geometrischen Winkels wird normalerweise durch die Größe der kleinsten Drehung charakterisiert, die einen der Strahlen in den anderen abbildet. Winkel mit gleicher Größe heißen gleich oder kongruent oder gleich groß.
In einigen Kontexten, z. B. beim Identifizieren eines Punkts auf einem Kreis oder beim Beschreiben der Orientierung eines Objekts in zwei Dimensionen relativ zu einer Referenzorientierung sind Winkel, die sich um ein genaues Vielfaches einer vollen Drehung unterscheiden, effektiv äquivalent. In anderen Kontexten, wie zum Beispiel beim Identifizieren eines Punktes auf einer Spiralkurve oder beim Beschreiben der kumulative Rotation eines Objekts in zwei Dimensionen relativ zu einer Referenzorientierung sind Winkel, die sich um ein Vielfaches einer vollen Drehung ungleich Null unterscheiden, nicht äquivalent.

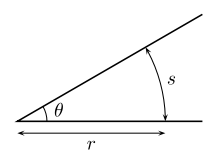
Um einen Winkel zu messen θ, wird ein im Scheitelpunkt des Winkels zentrierter Kreisbogen gezeichnet, zB mit einem Zirkel. Das Verhältnis der Länge S des Bogens um den Radius R des Kreises ist die Anzahl der Bogenmaße im Winkel. Konventionell wird in der Mathematik und im SI das Bogenmaß gleich dem dimensionslosen Wert 1 behandelt.
Der Winkel ausgedrückt in einer anderen Winkeleinheit kann dann durch Multiplizieren des Winkels mit einer geeigneten Umrechnungskonstante der Form . erhalten werden k/2π, wo k ist das Maß für eine komplette Umdrehung, ausgedrückt in der gewählten Einheit (z.B. k = 360° für Grad oder 400 Grad für Gradian):
- θ=k2π⋅SR.{displaystyle theta ={frac {k}{2pi}}cdot {frac {s}{r}}.}


Der Wert von θ so definiert ist unabhängig von der Größe des Kreises: Wird die Länge des Radius geändert, ändert sich die Bogenlänge im gleichen Verhältnis, also das Verhältnis S/R ist unverändert.[nb 1]
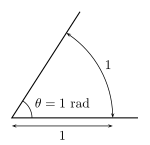
Insbesondere kann das Winkelmaß im Bogenmaß auch als Bogenlänge seines entsprechenden Einheitskreises interpretiert werden:[19]
Postulat der Winkeladdition[edit]
Das Postulat der Winkeladdition besagt, dass wenn B im Inneren des Winkels AOC liegt, dann
- m∠EINÖC=m∠EINÖB+m∠BÖC{displaystyle manglemathrm{AOC} =manglemathrm{AOB} +manglemathrm{BOC}}


Das Winkelmaß AOC ist die Summe aus dem Winkelmaß AOB und dem Winkelmaß BOC.
Einheiten[edit]

Im Laufe der Geschichte wurden Winkel in vielen verschiedenen Einheiten gemessen. Diese sind bekannt als Winkeleinheiten, wobei die aktuellsten Einheiten Grad (°), Radiant (rad) und Gradian (grad) sind, obwohl viele andere im Laufe der Geschichte verwendet wurden.[20]
Winkel im Bogenmaß sind für die Dimensionsanalyse dimensionslos.
Die meisten Winkelmaßeinheiten sind so definiert, dass eine Umdrehung (dh ein Vollkreis) gleich ist n Einheiten, für eine ganze Zahl n. Die beiden Ausnahmen sind das Bogenmaß (und seine Dezimalteiler) und der Durchmesserteil.
Einer im Bogenmaß ist der Winkel, den ein Kreisbogen einschließt, der die gleiche Länge wie der Radius des Kreises hat. Der Bogenmaß ist die abgeleitete Größe der Winkelmessung im SI-System. Per Definition ist es dimensionslos, obwohl es spezifiziert werden kann als rad um Unklarheiten zu vermeiden. In Grad gemessene Winkel werden mit dem Symbol ° angezeigt. Unterteilungen des Grades sind Minute (Symbol ′, 1′ = 1/60°) und Sekunde {Symbol ″, 1″ = 1/3600°}. Ein Winkel von 360° entspricht dem von einem Vollkreis eingeschlossenen Winkel und ist gleich 2π Radiant oder 400 Grad.
Andere Einheiten zur Darstellung von Winkeln sind in der folgenden Tabelle aufgeführt. Diese Einheiten sind so definiert, dass die Anzahl der Umdrehungen einem Vollkreis entspricht.
| Name | Nummer in einem Zug | Drehwinkel | Bezeichnung |
|---|---|---|---|
| Dreh dich | 1 | 360° | Die Dreh dich, Auch Kreislauf, voller Kreis, Revolution, und Drehung, ist eine vollständige kreisförmige Bewegung oder Messung (um zum gleichen Punkt zurückzukehren) mit Kreis oder Ellipse. Eine Kurve wird abgekürzt τ, cyc, Rev, oder verrotten je nach Anwendung.. Das Symbol τ kann auch als mathematische Konstante verwendet werden, um 2 . darzustellenπ Bogenmaß. |
| Vielfaches von π | 2 | 180° | Die Vielfaches von π (MULπ) ist im wissenschaftlichen Rechner RPN WP 43S implementiert.[21][22][23] Siehe auch: Von IEEE 754 empfohlene Operationen |
| Quadrant | 4 | 90° | Einer Quadrant ist ein 1/4 drehen und auch als a . bekannt rechter Winkel. Der Quadrant ist die Einheit, die in Euklids Elementen verwendet wird. Auf Deutsch das Symbol ∟ wurde verwendet, um einen Quadranten zu bezeichnen. Es ist die Einheit, die in Euklids Elements verwendet wird. 1 Vierer = 90° = π/2 rad = 1/4 Umdrehung = 100 grad. |
| Sextant | 6 | 60° | Die Sextant war die Einheit der Babylonier,[24][25] Grad, Bogenminute und Bogensekunde sind sexagesimale Untereinheiten der babylonischen Einheit. Mit Lineal und Zirkel ist es besonders einfach zu konstruieren. Es ist der Winkel des gleichseitigen Dreiecks oder ist 1/6 Dreh dich. 1 babylonische Einheit = 60° = π/3 rad ≈ 1,047197551 rad. |
| Radiant | 2π | 57°17′ | Die im Bogenmaß wird durch den Umfang eines Kreises bestimmt, dessen Länge gleich dem Radius des Kreises ist (n = 2π = 6.283…). Es ist der Winkel, den ein Kreisbogen einschließt, der die gleiche Länge wie der Radius des Kreises hat. Das Symbol für Radiant ist rad. Eine Umdrehung ist 2π Radiant, und ein Radiant ist 180°/π, oder etwa 57,2958 Grad. In mathematischen Texten werden Winkel oft als dimensionslos mit dem Bogenmaß gleich eins behandelt, woraus sich die Einheit ergibt rad wird oft weggelassen. Das Bogenmaß wird in praktisch allen mathematischen Arbeiten über die einfache praktische Geometrie hinaus verwendet, beispielsweise aufgrund der angenehmen und “natürlichen” Eigenschaften, die die trigonometrischen Funktionen zeigen, wenn ihre Argumente im Bogenmaß vorliegen. Das Bogenmaß ist die (abgeleitete) Maßeinheit für Winkelmaße im SI, die auch Winkel als dimensionslos behandelt. |
| Hexakontat | 60 | 6° | Die Hexakontade ist eine von Eratosthenes verwendete Einheit. Es ist gleich 6°, so dass eine ganze Umdrehung in 60 Hexakontaden unterteilt wurde. |
| Binärgrad | 256 | 1°33’45” | Die Binärgrad, auch bekannt als die binäres Bogenmaß (oder Brad).[26] Der binäre Grad wird bei der Berechnung verwendet, damit ein Winkel effizient in einem einzelnen Byte dargestellt werden kann (wenn auch mit begrenzter Genauigkeit). Andere Winkelmaße, die bei der Berechnung verwendet werden, können auf der Teilung einer ganzen Windung in 2 . basierenn gleiche Teile für andere Werte von n.
[27] es ist 1/256 einer Umdrehung.[26] |
| Grad | 360 | 1° | Ein Vorteil dieser alten sexagesimalen Untereinheit besteht darin, dass viele Winkel, die in der einfachen Geometrie üblich sind, in ganzen Grad gemessen werden. Bruchteile eines Grades können in normaler Dezimalschreibweise geschrieben werden (zB 3,5° für dreieinhalb Grad), aber auch die sexagesimalen Untereinheiten “Minute” und “Sekunde” des “Grad-Minute-Sekunde”-Systems werden verwendet, insbesondere für geographische Koordinaten und in Astronomie und Ballistik (n = 360) Die Grad, gekennzeichnet durch einen kleinen hochgestellten Kreis (°), ist 1/360 einer Umdrehung, also eins Dreh dich ist 360°. Der Fall von Graden für die zuvor angegebene Formel, a Grad von n = 360° Einheiten erhält man durch Einstellung k = 360°/2π. |
| Grad | 400 | 0°54′ | Die grad, auch genannt Grad, gradian, oder weg. ein rechter Winkel ist 100 Grad. Es ist eine dezimale Untereinheit des Quadranten. Ein Kilometer wurde historisch als ein Zentigrad des Bogens entlang eines Meridians der Erde definiert, daher ist der Kilometer das dezimale Analogon zur sexagesimalen Seemeile (n = 400). Der Grad wird hauptsächlich in der Triangulation und kontinentalen Vermessung verwendet. |
| Bogenminute | 21.600 | 0°1′ | Die Bogenminute (oder MOA, Winkelminute, oder nur Minute) ist 1/60 eines Grades. Eine Seemeile wurde historisch als Bogenminute entlang eines Großkreises der Erde definiert (n = 21.600). Die Winkelminute ist 1/60 eines Grades = 1/21.600 Dreh dich. Es wird durch eine einzelne Primzahl ( ′ ) bezeichnet. Zum Beispiel ist 3° 30′ gleich 3 × 60 + 30 = 210 Minuten oder 3 + 30/60 = 3,5 Grad. Manchmal wird auch ein gemischtes Format mit Dezimalbrüchen verwendet, zB 3° 5,72′ = 3 + 5,72/60 Grad. Eine Seemeile wurde historisch als Bogenminute entlang eines Großkreises der Erde definiert. |
| Zweiter Bogen | 1.296.000 | 0°0′1″ | Die Sekunde des Bogens (oder Bogensekunde, oder nur Sekunde) ist 1/60 einer Bogenminute und 1/3600 eines Abschlusses (n = 1.296.000). Die Bogensekunde (oder Sekunde des Bogens, oder nur Sekunde) ist 1/60 einer Bogenminute und 1/3600 eines Grades. Es wird durch eine doppelte Primzahl ( ) bezeichnet. Zum Beispiel ist 3° 7′ 30″ gleich 3 + 7/60 + 30/3600 Grad oder 3,125 Grad. |
Andere Deskriptoren[edit]
- Stundenwinkel (n = 24): Das astronomische Stundenwinkel ist 1/24 Dreh dich. Da dieses System für die Messung von Objekten geeignet ist, die einmal pro Tag kreisen (wie die relative Position von Sternen), werden die sexagesimalen Untereinheiten genannt Minute Zeit und zweites Mal. Diese unterscheiden sich von Bogenminuten und Bogensekunden und sind 15-mal größer als diese. 1 Stunde = 15° = π/12 rad = 1/6 Quad = 1/24 drehen = 16+2/3 grad.
- (Kompass) Punkt oder Wind (n = 32): Die Punkt, in der Navigation verwendet, ist 1/32 einer Umdrehung. 1 Punkt = 1/8 eines rechten Winkels = 11,25° = 12,5 Grad. Jeder Punkt ist in vier Viertelpunkte unterteilt, so dass 1 Umdrehung 128 Viertelpunkten entspricht.
- Pechus (n = 144–180): Die pechus war eine babylonische Einheit von etwa 2° or 2+1/2°.
- Tau, die Anzahl der Bogenmaße in einer Umdrehung (1 Umdrehung = τ rad), τ = 2π.
- Chi, eine alte chinesische Winkelmessung.[citation needed]
- Durchmesserteil (n = 376,99…): Die Durchmesserteil (gelegentlich in der islamischen Mathematik verwendet) ist 1/60 rad. Ein “Durchmesserteil” beträgt ungefähr 0,95493º. Es gibt ungefähr 376.991 Teile mit Durchmesser pro Umdrehung.
- Milliradian und abgeleitete Definitionen: Der wahre Milliradian wird als Tausendstel Radiant definiert, was bedeutet, dass eine Drehung um eine Umdrehung genau 2000π mil (oder ungefähr 6283,185 mil) entsprechen würde, und fast alle Zielfernrohre für Schusswaffen sind auf diese Definition kalibriert. Darüber hinaus gibt es drei weitere abgeleitete Definitionen, die für Artillerie und Navigation verwendet werden: CA gleich einem Milliradian. Unter diesen drei anderen Definitionen entspricht eine Umdrehung genau 6000, 6300 oder 6400 mil, was einer Spanne von 0,05625 bis 0,06 Grad (3,375 bis 3,6 Minuten) entspricht. Im Vergleich dazu beträgt der wahre Milliradian ungefähr 0,05729578 Grad (3,43775 Minuten). Eine “NATO mil” ist definiert als 1/6400 eines Kreises. Genau wie beim wahren Milliradian nutzt jede der anderen Definitionen die nützliche Eigenschaft von mil der Subtension aus, dh dass der Wert eines Milliradian ungefähr gleich dem Winkel ist, den eine Breite von 1 Meter aus 1 km Entfernung betrachtet (2π/6400 = 0,0009817… 1/1000).
- Echnam und Zam. Im alten Arabien wurde ein Zug in 32 Akhnam unterteilt und jeder Akhnam wurde in 7 Zam unterteilt, so dass ein Zug 224 Zam beträgt.
Positive und negative Winkel[edit]
Obwohl die Definition der Messung eines Winkels das Konzept eines negativen Winkels nicht unterstützt, ist es häufig nützlich, eine Konvention festzulegen, die es ermöglicht, dass positive und negative Winkelwerte Orientierungen und/oder Drehungen in entgegengesetzten Richtungen relativ zu einer Referenz darstellen.
In einem zweidimensionalen kartesischen Koordinatensystem wird ein Winkel typischerweise durch seine beiden Seiten definiert, wobei sein Scheitel im Ursprung liegt. Die Anfangsseite auf der positiven x-Achse liegt, während die andere Seite oder Klemmenseite wird durch das Maß von der Anfangsseite in Bogenmaß, Grad oder Drehungen definiert. Mit positive Winkel Darstellung von Drehungen zur positiven y-Achse und negative Winkel Darstellung von Drehungen ins Negative ja-Achse. Wenn kartesische Koordinaten dargestellt werden durch Standardposition, definiert durch die x-Achse nach rechts und die ja-Achse nach oben, positive Drehungen gegen den Uhrzeigersinn und negative Drehungen im Uhrzeigersinn.
In vielen Kontexten ist ein Winkel von −θ entspricht effektiv einem Winkel von “eine volle Umdrehung minus θ“. Beispielsweise ist eine als -45° dargestellte Orientierung effektiv äquivalent zu einer als 360° – 45° oder 315° repräsentierten Orientierung. Obwohl die Endposition dieselbe ist, ist eine physikalische Drehung (Bewegung) von -45° nicht die gleichbedeutend mit einer Drehung von 315° (zum Beispiel würde die Drehung einer Person, die einen Besen auf einem staubigen Boden hält, visuell unterschiedliche Spuren von gekehrten Bereichen auf dem Boden hinterlassen).
In der dreidimensionalen Geometrie haben “im Uhrzeigersinn” und “gegen den Uhrzeigersinn” keine absolute Bedeutung, daher muss die Richtung positiver und negativer Winkel relativ zu einer Referenz definiert werden, bei der es sich normalerweise um einen Vektor handelt, der durch den Scheitelpunkt des Winkels und senkrecht zur Ebene in verläuft wo die Strahlen des Winkels liegen.
In der Navigation werden Peilungen oder Azimut relativ zum Norden gemessen. Konventionell sind Peilungswinkel von oben betrachtet positiv im Uhrzeigersinn, so dass eine Peilung von 45° einer Nordost-Ausrichtung entspricht. Negative Peilungen werden in der Navigation nicht verwendet, daher entspricht eine Nordwest-Ausrichtung einer Peilung von 315°.
Alternative Methoden zum Messen der Größe eines Winkels[edit]
Es gibt mehrere Alternativen, die Größe eines Winkels anhand des Drehwinkels zu messen. Die Neigung oder Gradient ist gleich dem Tangens des Winkels oder manchmal (selten) dem Sinus; eine Steigung wird oft in Prozent ausgedrückt. Bei sehr kleinen Werten (weniger als 5 %) ist die Steigung ungefähr das Maß des Winkels im Bogenmaß.
In der rationalen Geometrie ist der Verbreitung zwischen zwei Geraden ist definiert als das Quadrat des Sinus des Winkels zwischen den Geraden. Da der Sinus eines Winkels und der Sinus seines Zusatzwinkels gleich sind, führt jeder Drehwinkel, der eine der Linien in die andere abbildet, zum gleichen Wert für die Spreizung zwischen den Linien.
Astronomische Näherungen[edit]
Astronomen messen den Winkelabstand von Objekten in Grad von ihrem Beobachtungspunkt aus.
- 0,5° entspricht ungefähr der Breite der Sonne oder des Mondes.
- 1° entspricht ungefähr der Breite eines kleinen Fingers auf Armlänge.
- 10° entspricht ungefähr der Breite einer geschlossenen Faust auf Armlänge.
- 20° entspricht ungefähr der Breite einer Handspanne bei Armlänge.
Diese Messungen hängen eindeutig vom einzelnen Probanden ab, und die obigen Angaben sollten nur als grobe Näherungswerte angesehen werden.
In der Astronomie werden Rektaszension und Deklination normalerweise in Winkeleinheiten gemessen, ausgedrückt in Zeit, bezogen auf einen 24-Stunden-Tag.
| Einheit | Symbol | Grad | Radiant | Kreis | Sonstiges |
|---|---|---|---|---|---|
| Stunde | h | 15° | π/12 | 1/24 | |
| Minute | m | 0°15′ | π/720 | 1/1.440 | 1/60 Stunde |
| Sekunde | S | 0°0’15” | π/43200 | 1/86.400 | 1/60 Minute |
Messungen, die keine Winkeleinheiten sind[edit]
Nicht alle Winkelmessungen sind Winkeleinheiten, für eine Winkelmessung gilt definitionsgemäß das Winkeladditionspostulat.
Einige Winkelmessungen, bei denen das Postulat der Winkeladdition nicht gilt, umfassen:
Winkel zwischen Kurven[edit]


Der Winkel zwischen einer Geraden und einer Kurve (Mischwinkel) oder zwischen zwei sich schneidenden Kurven (krummliniger Winkel) wird als Winkel zwischen den Tangenten im Schnittpunkt definiert. Für bestimmte Fälle wurden verschiedene Namen (jetzt selten, wenn überhaupt verwendet) gegeben:amphizyrtisch (GR. μφί, beidseitig, κυρτός, konvex) oder cissoidal (Gr. κισσός, Efeu), bikonvex; xystroidal oder sistroidisch (Gr. ξυστρίς, ein Werkzeug zum Schaben), konkav-konvex; amphicoelisch (Gr. κοίλη, eine Mulde) oder Angulus lunularis, bikonkav.[28]
Winkelhalbierende und Dreieckswinkel[edit]
Die antiken griechischen Mathematiker wussten, wie man einen Winkel nur mit Zirkel und Lineal halbiert (in zwei gleiche Winkel teilt), aber sie konnten nur bestimmte Winkel dreiteilen. 1837 zeigte Pierre Wantzel, dass diese Konstruktion für die meisten Winkel nicht ausgeführt werden kann.
Punktprodukt und Verallgemeinerungen[edit]
Im euklidischen Raum ist der Winkel θ zwischen zwei euklidischen Vektoren du und v steht in Beziehung zu ihrem Skalarprodukt und ihren Längen durch die Formel
- du⋅v=cos(θ)IchduIchIchvIch.{displaystyle mathbf {u} cdot mathbf {v} =cos(theta)left|mathbf {u} right|left|mathbf {v} right|.}


Diese Formel bietet eine einfache Methode, um den Winkel zwischen zwei Ebenen (oder gekrümmten Oberflächen) aus ihren Normalenvektoren und zwischen schiefen Linien aus ihren Vektorgleichungen zu bestimmen.
Innenprodukt[edit]
Um Winkel in einem abstrakten reellen inneren Produktraum zu definieren, ersetzen wir das euklidische Punktprodukt ( · ) durch das innere Produkt
Ich⋅,⋅Ich{displaystylelanglecdot,cdotrangle}, dh


- Ichdu,vIch=cos(θ) IchduIchIchvIch.{displaystyle langle mathbf {u} ,mathbf {v} rangle =cos(theta ) left|mathbf {u} right|left|mathbf {v} right |.}


In einem komplexen inneren Produktraum kann der obige Ausdruck für den Kosinus nichtreelle Werte ergeben, daher wird er ersetzt durch
- Betreff(Ichdu,vIch)=cos(θ)IchduIchIchvIch.{displaystyle operatorname {Re} left(langle mathbf {u} ,mathbf {v} rangle right)=cos(theta)left|mathbf {u} right| links|mathbf{v} rechts|.}


oder, häufiger, den Absolutwert verwenden, mit
- |Ichdu,vIch|=|cos(θ)|IchduIchIchvIch.{displaystyle left|langlemathbf {u} ,mathbf {v} rangle right|=left|cos(theta )right|left|mathbf {u} right| left|mathbf{v} right|.}


Letztere Definition ignoriert die Richtung der Vektoren und beschreibt damit den Winkel zwischen eindimensionalen Unterräumen
Spanne(du){displaystyle operatorname {span} (mathbf {u} )}und
Spanne(v){displaystyle operatorname {span} (mathbf {v} )}

aufgespannt durch die Vektoren
du{displaystylemathbf{u}}

und
v{displaystylemathbf{v}}

entsprechend.


Winkel zwischen Unterräumen[edit]
Die Definition des Winkels zwischen eindimensionalen Unterräumen
Spanne(du){displaystyle operatorname {span} (mathbf {u} )}und
Spanne(v){displaystyle operatorname {span} (mathbf {v} )}gegeben von
- |Ichdu,vIch|=|cos(θ)|IchduIchIchvIch{displaystyle left|langlemathbf {u} ,mathbf {v} rangle right|=left|cos(theta )right|left|mathbf {u} right| left|mathbf{v} right|}


in einem Hilbertraum kann auf Unterräume beliebiger endlicher Dimensionen erweitert werden. Gegeben zwei Unterräume
U{displaystyle {mathcal {U}}},
W{displaystyle {mathcal {W}}}

mit
trübe(U):=k≤trübe(W):=l{displaystyle dim({mathcal{U}}):=kleqdim({mathcal{W}}):=l}

, dies führt zu einer Definition von
k{displaystyle k}

Winkel, die als kanonische oder Hauptwinkel zwischen Unterräumen bezeichnet werden.


Winkel in der Riemannschen Geometrie[edit]
In der Riemannschen Geometrie wird der metrische Tensor verwendet, um den Winkel zwischen zwei Tangenten zu definieren. Woher U und V sind Tangentenvektoren und gij sind die Komponenten des metrischen Tensors g,
- cosθ=gichJUichVJ|gichJUichUJ||gichJVichVJ|.{displaystyle costheta ={frac {g_{ij}U^{i}V^{j}}{sqrt {left|g_{ij}U^{i}U^{j}right |left|g_{ij}V^{i}V^{j}right|}}}.}


Hyperbolischer Winkel[edit]
Ein hyperbolischer Winkel ist ein Argument für eine hyperbolische Funktion, genauso wie der Kreiswinkel ist das Argument einer Kreisfunktion. Der Vergleich kann als Größe der Öffnungen eines hyperbolischen Sektors und eines Kreissektors visualisiert werden, da die Flächen dieser Sektoren jeweils den Winkelbeträgen entsprechen. Im Gegensatz zum Kreiswinkel ist der hyperbolische Winkel unbeschränkt. Wenn die kreisförmigen und hyperbolischen Funktionen in ihrem Winkelargument als unendliche Reihen betrachtet werden, sind die kreisförmigen nur abwechselnde Reihenformen der hyperbolischen Funktionen. Dieses Verweben der beiden Arten von Winkel und Funktion wurde von Leonhard Euler in Einführung in die Analyse des Unendlichen.
Winkel in Geographie und Astronomie[edit]
In der Geographie kann die Position eines beliebigen Punktes auf der Erde mit a . identifiziert werden geographisches Koordinatensystem. Dieses System gibt den Breiten- und Längengrad eines beliebigen Ortes in Bezug auf den Erdmittelpunkt an, wobei der Äquator und (normalerweise) der Greenwich-Meridian als Referenzen verwendet werden.
In der Astronomie kann ein bestimmter Punkt auf der Himmelskugel (d. h. die scheinbare Position eines astronomischen Objekts) mit einer von mehreren identifiziert werden astronomische Koordinatensysteme, wobei die Referenzen je nach System variieren. Astronomen messen die Winkelabstand zweier Sterne, indem man sich zwei Linien durch den Erdmittelpunkt vorstellt, die jeweils einen der Sterne schneiden. Der Winkel zwischen diesen Linien kann gemessen werden und ist der Winkelabstand zwischen den beiden Sternen.
Sowohl in der Geographie als auch in der Astronomie kann eine Zielrichtung in Form eines vertikalen Winkels wie Höhe/Elevation bezüglich des Horizonts sowie des Azimuts bezüglich Norden angegeben werden.
Astronomen messen auch die scheinbare Größe von Objekten als Winkeldurchmesser. Beispielsweise hat der Vollmond von der Erde aus gesehen einen Winkeldurchmesser von etwa 0,5°. Man könnte sagen: “Der Durchmesser des Mondes umfasst einen Winkel von einem halben Grad.” Die Kleinwinkelformel kann verwendet werden, um eine solche Winkelmessung in ein Entfernungs-/Größenverhältnis umzuwandeln.
Siehe auch[edit]
- ^ Dieser Ansatz erfordert jedoch einen zusätzlichen Nachweis, dass sich das Winkelmaß mit sich änderndem Radius nicht ändert R, zusätzlich zum Thema “Ausgewählte Maßeinheiten”. Ein sanfterer Ansatz besteht darin, den Winkel anhand der Länge des entsprechenden Einheitskreisbogens zu messen. Hier kann “Einheit” dimensionslos gewählt werden, in dem Sinne, dass es sich um die reelle Zahl 1 handelt, die dem Einheitssegment auf der reellen Linie zugeordnet ist. Siehe zum Beispiel Radoslav M. Dimitrić.[18]
Verweise[edit]
- ^ Sidorow 2001
- ^ Slocum 2007
- ^ Chisholm 1911; Heiberg 1908, S. 177–178
- ^ “Winkel – spitz, stumpf, gerade und rechts”. www.mathsisfun.com. Abgerufen 2020-08-17.
- ^ Weisstein, Eric W. “Winkel”. mathworld.wolfram.com. Abgerufen 2020-08-17.
- ^ “Mathwords: Referenzwinkel”. www.mathwords.com. Archiviert vom Original vom 23. Oktober 2017. Abgerufen 26. April 2018.
- ^ Wong & Wong 2009, S. 161–163
- ^ Euklid. Die Elemente. Satz I:13.
- ^ “Komplementäre Winkel”. www.mathsisfun.com. Abgerufen 2020-08-17.
- ^ ein B Chisholm 1911
- ^ “Ergänzungswinkel”. www.mathsisfun.com. Abgerufen 2020-08-17.
- ^ ein B C Johnson, Roger A. Erweiterte euklidische Geometrie, Dover-Veröffentlichungen, 2007.
- ^ D. Zwillinger, Hrsg. (1995), CRC Standardmathematische Tabellen und Formeln, Boca Raton, FL: CRC Press, p. 270 wie zitiert in Weisstein, Eric W. “Außenwinkel”. MathWorld.
- ^ Dimitrić, Radoslav M. (2012). “Über Winkel und Winkelmessungen” (PDF). Der Mathematikunterricht. XV (2): 133–140. Archiviert (PDF) vom Original am 17.01.2019. Abgerufen 2019-08-06.
- ^ Weisstein, Eric W. “Radiant”. mathworld.wolfram.com. Abgerufen 2020-08-31.
- ^ “Winkeleinheit”. TheFreeDictionary.com. Abgerufen 2020-08-31.
- ^ Bonin, Walter (2016-01-11). “RE: WP-32S im Jahr 2016?”. HP-Museum. Archiviert aus dem Original am 06.08.2019. Abgerufen 2019-08-05.
- ^ Bonin, Walter (2019) [2015]. WP 43S Bedienungsanleitung (PDF). 0,12 (Entwurf der Hrsg.). S. 72, 118–119, 311. ISBN 978-1-72950098-9. Abgerufen 2019-08-05.[permanent dead link][1] [2] (314 Seiten)
- ^ Bonin, Walter (2019) [2015]. WP 43S Referenzhandbuch (PDF). 0,12 (Entwurf der Hrsg.). S. iii, 54, 97, 128, 144, 193, 195. ISBN 978-1-72950106-1. Abgerufen 2019-08-05.[permanent dead link][3] [4] (271 Seiten)
- ^ Jeans, James Hopwood (1947). Das Wachstum der Physik. CUP-Archiv. P. 7.
- ^ Murnaghan, Francis Dominic (1946). Analytische Geometrie. P. 2.
- ^ ein B “ooPIC Programmierhandbuch – Kapitel 15: URCP”. ooPIC Handbuch & Technische Spezifikationen – ooPIC Compiler Ver 6.0. Savage Innovations, LLC. 2007 [1997]. Archiviert von das Original am 28.06.2008. Abgerufen 2019-08-05.
- ^ Hargreaves, Shawn. “Winkel, ganze Zahlen und Modulo-Arithmetik”. blogs.msdn.com. Archiviert vom Original am 30.06.2019. Abgerufen 2019-08-05.
- ^ Chisholm 1911; Heiberg 1908, S. 178
Literaturverzeichnis[edit]
- Henderson, David W.; Taimina, Daina (2005), Geometrie / Euklidisch und Nichteuklidisch mit Geschichte erleben (3. Aufl.), Pearson Prentice Hall, p. 104, ISBN 978-0-13-143748-7
- Heiberg, Johan Ludvig (1908), Heide, TL (Hrsg.), Euklid, Die dreizehn Bücher von Euklids Elementen, 1, Cambridge: Cambridge University Press.
- Sidorow, LA (2001) [1994], “Winkel”, Enzyklopädie der Mathematik, EMS-Presse
- Jacobs, Harold R. (1974), Geometrie, WH Freeman, S. 97, 255, ISBN 978-0-7167-0456-0
- Slocum, Jonathan (2007), Vorläufiges indogermanisches Lexikon – Pokorny PIE-Daten, Forschungsabteilung der Universität Texas: Forschungszentrum für Linguistik, abgerufen 2. Februar 2010
- Shute, William G.; Shirk, William W.; Porter, George F. (1960), Ebenen- und Volumengeometrie, American Book Company, S. 25–27
- Wong, Tak-wah; Wong, Ming-sim (2009), “Winkel in sich schneidenden und parallelen Linien”, Mathematik des neuen Jahrhunderts, 1B (1 Hrsg.), Hongkong: Oxford University Press, S. 161–163, ISBN 978-0-19-800177-5
Dieser Artikel enthält Text aus einer Veröffentlichung, die jetzt öffentlich zugänglich ist: Chisholm, Hugh, Hrsg. (1911), “Winkel“, Encyclopædia Britannica, 2 (11. Aufl.), Cambridge University Press, p. 14

Externe Links[edit]
Recent Comments