ヤコブススタブ – ウィキペディア


(ピーター・アピアン、 はじめにマウス 、1523)
a ジェイコブのスタッフ (ラテン Jaculus )、 また グラッドストック また Kreuzstab 、角度測定と間接ルート測定のための以前の天文学機器です。主に船乗りだけでなく、土地調査や天文学でも使用されていました。 Jakobsstabは、航海の六十年の先駆者でした。
ヤコブススタブの海で対処するための発明は13世紀に簡単であり、11世紀にアヴィセンナによって開発されたものさえ似ていました [初め] バイザーデバイスですが、レジオモンタヌスと呼ばれる最初のヨハネス・ミュラーは、15世紀に楽器を人気のある測定装置にしました。 [2]
スタッフの名前は、「ヤコブススタブ」としても知られるヤコブスピルガーの巡礼スティックとの特定の類似性から来ています。
Jakobsstabは、読み取りスケールのベースロッドといくつかのクロスウッドで構成されており、そのうち1つまたは2つは測定に使用され、その選択は必要な角度範囲に依存します。クロスウッドはそれにクロスボウのような外観を与えます。そのため、セクステントを使用するときにまだ言われています。 男 シュート 星 地平線の上の身長を測定する場合。
Messungの買い物 [ 編集 | ソーステキストを編集します ]

船乗りでは、このデバイスは主に地理的幅を決定するのに役立ちました。この目的のために、太陽の高度または固定星(主に極性星の)が航海の地平線の上に測定されました。
沿岸航法の場合、陸生目的地間の角度もそれで測定され、地図上の独自の位置を決定しました。
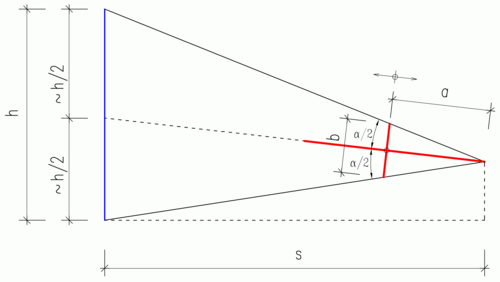
縦スティックを目の下の目の下に置き、その終わりが地平線とターゲットの星またはターゲットが重複するまでクロスピースをシフトすることによって使用されます。クロスバーの長さの半分は、メインのウサギ(目からクロススティックまでの距離)で読み取られた長さで割って、地平線と星の間の角度の角度の半分の接線をもたらします。縦方向のスタッフのスケーリングは、角度を特定のクロスロッドの長さで直接読み取ることができるようにしばしば実行されました。
2つのベアリングは、スケールを介して横方向のタブのシフト中に同時に維持されなければならないため、このアプリケーションは困難です。これは、特に変動する船では望ましい精度で実行されることはほとんどありません。
距離または距離の計算 [ 編集 | ソーステキストを編集します ]
他の値がわかっている場合は、ヤコブススタブの助けを借りて、オブジェクトの高さまたは距離を測定することもできます。
以下はすべての人に適用されます。
=オブジェクトまでの距離
 =オブジェクトまでの距離
=オブジェクトまでの距離
=オブジェクトの量
 =オブジェクトの量
=オブジェクトの量
=目のレベル
 =目のレベル
=目のレベル
=ランナーの目への除去
 =ランナーの目への除去
=ランナーの目への除去
=ランナーの長さ
 =ランナーの長さ
=ランナーの長さ 近似式 [ 編集 | ソーステキストを編集します ]

遠く離れたところに、次の式を使用することができます。
距離
与えられた高さです
:

また

また

また

高さ
特定の距離です
:

また

アピアンの方法 [ 編集 | ソーステキストを編集します ]
数学者のフィリップ・アピアン(1531–1589)は、ヤコブススタブでオブジェクトの量を決定する方法を説明しました。彼の後、ヤコブススタブは、オブジェクトの上部とオブジェクトの下端にそれに応じて見えるように、ヤコブススタブを目に留めなければなりません。その後、アピアンによれば、高さを計算します
次の式のオブジェクトの:

Philipp Apianは、この請求書に2番目の光線セットを使用しています。ただし、この文の条件は、ランナーが必ずしも主題と平行ではないため、常にここで満たされるとは限りません。ただし、このエラーは距離が大きく低いです。
正確な決定(オブジェクトに平行なランナー) [ 編集 | ソーステキストを編集します ]


高さを正確に決定するための2つのオプションがあります。 1つ目はよりシンプルで、光線セットに基づいており、角度関数を必要としません。ランナーが被写体と平行になるようにヤコブススタブを維持する必要があり、オブジェクトの上部にランナーの上端を再び見ることができます。次に、高さを計算するための式は次のとおりです
:

正確な決定(一般的なケース) [ 編集 | ソーステキストを編集します ]
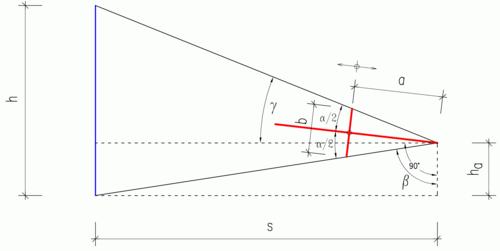
角度関数が使用されるため、2番目の方法はもう少し複雑です。フィリップ・アピアンが説明したように、ヤコブススタブは再び維持されなければなりません。ここでも、目のレベルはそうです
必要です。
解決策オーバー


解決策オーバー


2番目の方法の利点は、ランナーがオブジェクトと並行してオブジェクトに並行しているかどうかに注意を払う必要がないことです。このフォーミュラを習得するのは難しいです。
- フランス・エイドリアン・トライ: 角度測定機器。 16世紀から19世紀初頭まで。 芸術博物館、ベルリン1979(展示カタログ、ベルリン、クンストジュワルベムサウム、1979年11月9日 – 1980年2月23日)。
- ウィレムF. J.メルツァーブルーインズ: クロススタッフ。ナビゲーション楽器の歴史と開発。 Vereeniging Nederlandse Historisch Scheepvaart Museum、Zutphen 1994、ISBN 90-6011-907-X( Vereeniging Nederlandse Historisch Scheepvaart Museum。卒業記念アルバム 1994)。
- アルバート・シュック: ジェイコブのスタッフ。 の: ミュンヘン地理学会の年次報告書。 HEFT 2、1894/1895、 ISSN 0938-2097 、S。93–174。
- ↑ Gotthard Strohmaier: アヴィセンナ。 ベック、ミュンヘン1999。ISBN3-406-41946-1、p。157。
- ↑ ラルフ・カーン: その時代の科学機器。 Astrolabから数学的なカトラリーまで 。ケルン:WaltherKönigBookstoreのVerlag、2010年。p。214。
Recent Comments