Euklidischer Vektor – Wikipedia
Geometrisches Objekt mit Länge und Richtung

In Mathematik, Physik und Ingenieurwesen, a Euklidischer Vektor (manchmal a genannt geometrisch[1] oder räumlicher Vektor,[2] oder – wie hier – einfach a Vektor) ist ein geometrisches Objekt mit Größe (oder Länge) und Richtung. Vektoren können gemäß der Vektoralgebra zu anderen Vektoren hinzugefügt werden. Ein euklidischer Vektor wird häufig durch einen Strahl (ein Liniensegment mit einer bestimmten Richtung) oder grafisch als Pfeil dargestellt, der eine verbindet Ausgangspunkt EIN mit einer Endpunkt B.,[3] und bezeichnet mit
.[4]
 .[4]
.[4]Ein Vektor ist das, was benötigt wird, um den Punkt zu “tragen” EIN auf den Punkt B.;; das lateinische Wort Vektor bedeutet “Träger”.[5] Es wurde erstmals von Astronomen des 18. Jahrhunderts verwendet, die die planetare Revolution um die Sonne untersuchten.[6] Die Größe des Vektors ist der Abstand zwischen den beiden Punkten, und die Richtung bezieht sich auf die Richtung der Verschiebung von EIN zu B.. Viele algebraische Operationen mit reellen Zahlen wie Addition, Subtraktion, Multiplikation und Negation haben enge Analoga für Vektoren.[7] Operationen, die den bekannten algebraischen Gesetzen der Kommutativität, Assoziativität und Verteilungsfähigkeit gehorchen. Diese Operationen und zugehörigen Gesetze qualifizieren euklidische Vektoren als Beispiel für das allgemeinere Konzept von Vektoren, die einfach als Elemente eines Vektorraums definiert sind.
Vektoren spielen in der Physik eine wichtige Rolle: Die Geschwindigkeit und Beschleunigung eines sich bewegenden Objekts und die darauf einwirkenden Kräfte können alle mit Vektoren beschrieben werden.[8] Viele andere physikalische Größen können sinnvollerweise als Vektoren betrachtet werden. Obwohl die meisten von ihnen keine Entfernungen darstellen (außer zum Beispiel Position oder Verschiebung), können ihre Größe und Richtung immer noch durch die Länge und Richtung eines Pfeils dargestellt werden. Die mathematische Darstellung eines physikalischen Vektors hängt von dem zur Beschreibung verwendeten Koordinatensystem ab. Andere vektorähnliche Objekte, die physikalische Größen beschreiben und sich bei Änderungen des Koordinatensystems auf ähnliche Weise transformieren, umfassen Pseudovektoren und Tensoren.[9]
Geschichte[edit]
Das Konzept des Vektors, wie wir es heute kennen, entwickelte sich schrittweise über einen Zeitraum von mehr als 200 Jahren. Rund ein Dutzend Menschen haben maßgeblich zur Entwicklung beigetragen.[10]
Im Jahr 1835 abstrahierte Giusto Bellavitis die Grundidee, als er das Konzept der Äquipollenz etablierte. Er arbeitete in einer euklidischen Ebene und machte jedes Paar Liniensegmente gleicher Länge und Ausrichtung gleich. Im Wesentlichen realisierte er eine Äquivalenzbeziehung für die Punktepaare (Bipunkte) in der Ebene und errichtete so den ersten Vektorraum in der Ebene.[10]::52–4
Der Begriff Vektor wurde von William Rowan Hamilton als Teil einer Quaternion eingeführt, die eine Summe ist q = s + v einer reellen Zahl s (auch genannt Skalar) und eine 3-dimensionale Vektor. Wie Bellavitis betrachtete Hamilton Vektoren als repräsentativ für Klassen äquipollent gerichteter Segmente. Da komplexe Zahlen eine imaginäre Einheit verwenden, um die reelle Linie zu ergänzen, betrachtete Hamilton den Vektor v zu sein Imaginärteil einer Quaternion:
- Der algebraisch imaginäre Teil, der geometrisch durch eine gerade Linie oder einen Radiusvektor konstruiert ist, der im Allgemeinen für jede bestimmte Quaternion eine bestimmte Länge und eine bestimmte Richtung im Raum aufweist, kann als Vektorteil oder einfach als Vektor der bezeichnet werden Quaternion.[11]
Mehrere andere Mathematiker entwickelten Mitte des 19. Jahrhunderts vektorähnliche Systeme, darunter Augustin Cauchy, Hermann Grassmann, August Möbius, Comte de Saint-Venant und Matthew O’Brien. Grassmanns Werk von 1840 Theorie der Ebbe und Flut (Theorie von Ebbe und Flut) war das erste System der räumlichen Analyse, das dem heutigen System ähnlich ist und Ideen hatte, die dem Kreuzprodukt, dem Skalarprodukt und der Vektordifferenzierung entsprechen. Grassmanns Arbeit wurde bis in die 1870er Jahre weitgehend vernachlässigt.[10]
Peter Guthrie Tait trug den Quaternionsstandard nach Hamilton. Sein 1867 Elementare Abhandlung über Quaternionen umfasste eine umfassende Behandlung des Nabla- oder Del-Operators ∇.
Im Jahr 1878, Elemente der Dynamik wurde von William Kingdon Clifford veröffentlicht. Clifford vereinfachte die Quaternionsstudie, indem er das Punktprodukt und das Kreuzprodukt zweier Vektoren aus dem vollständigen Quaternionsprodukt isolierte. Dieser Ansatz stellte Ingenieuren Vektorberechnungen zur Verfügung – und anderen, die in drei Dimensionen arbeiteten und der vierten skeptisch gegenüberstanden.
Josiah Willard Gibbs, der durch James Clerk Maxwell Quaternionen ausgesetzt war Abhandlung über Elektrizität und Magnetismustrennten ihren Vektorteil zur unabhängigen Behandlung ab. Die erste Hälfte von Gibbs Elemente der Vektoranalyse, veröffentlicht 1881, präsentiert das im Wesentlichen moderne System der Vektoranalyse.[10][7] Im Jahr 1901 veröffentlichte Edwin Bidwell Wilson Vektoranalyse, adaptiert aus Gibbs Vorlesungen, die jegliche Erwähnung von Quaternionen bei der Entwicklung der Vektorrechnung verbannten.
Überblick[edit]
In der Physik und Technik wird ein Vektor typischerweise als eine geometrische Einheit angesehen, die durch eine Größe und eine Richtung gekennzeichnet ist. Es wird formal als gerichtetes Liniensegment oder Pfeil in einem euklidischen Raum definiert.[12] In der reinen Mathematik wird ein Vektor allgemeiner als jedes Element eines Vektorraums definiert. In diesem Zusammenhang sind Vektoren abstrakte Entitäten, die durch eine Größe und eine Richtung charakterisiert sein können oder nicht. Diese verallgemeinerte Definition impliziert, dass die oben erwähnten geometrischen Einheiten eine spezielle Art von Vektoren sind, da sie Elemente einer speziellen Art von Vektorraum sind, der als euklidischer Raum bezeichnet wird.
In diesem Artikel geht es um Vektoren, die im euklidischen Raum streng als Pfeile definiert sind. Wenn es notwendig wird, diese speziellen Vektoren von Vektoren zu unterscheiden, wie sie in der reinen Mathematik definiert sind, werden sie manchmal als bezeichnet geometrisch, räumlich, oder Euklidisch Vektoren.
Als Pfeil besitzt ein euklidischer Vektor eine bestimmte Ausgangspunkt und Endpunkt. Ein Vektor mit festem Anfangs- und Endpunkt heißt a gebundener Vektor.[13] Wenn nur die Größe und Richtung des Vektors von Bedeutung sind, spielt der jeweilige Anfangspunkt keine Rolle, und der Vektor wird als a bezeichnet freier Vektor. Also zwei Pfeile
und
im Raum stellen den gleichen freien Vektor dar, wenn sie die gleiche Größe und Richtung haben: das heißt, sie sind äquipollent, wenn das Viereck ABB’A ‘ ist ein Parallelogramm. Wenn der euklidische Raum mit einer Wahl des Ursprungs ausgestattet ist, entspricht ein freier Vektor dem gebundenen Vektor derselben Größe und Richtung, dessen Anfangspunkt der Ursprung ist.
 im Raum stellen den gleichen freien Vektor dar, wenn sie die gleiche Größe und Richtung haben: das heißt, sie sind äquipollent, wenn das Viereck ABB’A ‘ ist ein Parallelogramm. Wenn der euklidische Raum mit einer Wahl des Ursprungs ausgestattet ist, entspricht ein freier Vektor dem gebundenen Vektor derselben Größe und Richtung, dessen Anfangspunkt der Ursprung ist.
im Raum stellen den gleichen freien Vektor dar, wenn sie die gleiche Größe und Richtung haben: das heißt, sie sind äquipollent, wenn das Viereck ABB’A ‘ ist ein Parallelogramm. Wenn der euklidische Raum mit einer Wahl des Ursprungs ausgestattet ist, entspricht ein freier Vektor dem gebundenen Vektor derselben Größe und Richtung, dessen Anfangspunkt der Ursprung ist.
Der Begriff Vektor hat auch Verallgemeinerungen zu höheren Dimensionen und zu formaleren Ansätzen mit viel breiteren Anwendungen.
Beispiele in einer Dimension[edit]
Da das Kraftkonzept des Physikers eine Richtung und eine Größe hat, kann es als Vektor angesehen werden. Betrachten Sie als Beispiel eine nach rechts gerichtete Kraft F. von 15 Newton. Wenn die positive Achse auch nach rechts gerichtet ist, dann F. wird durch den Vektor 15 N dargestellt, und wenn positiv nach links zeigt, dann der Vektor für F. beträgt –15 N. In jedem Fall beträgt die Größe des Vektors 15 N. Ebenso ist die Vektordarstellung einer Verschiebung Δs von 4 Metern wäre 4 m oder -4 m, abhängig von seiner Richtung, und seine Größe wäre unabhängig davon 4 m.
In Physik und Technik[edit]
Vektoren sind in den Naturwissenschaften von grundlegender Bedeutung. Sie können verwendet werden, um jede Größe darzustellen, die eine Größe hat, eine Richtung hat und die den Regeln der Vektoraddition entspricht. Ein Beispiel ist die Geschwindigkeit, deren Größe die Geschwindigkeit ist. Zum Beispiel die Geschwindigkeit 5 Meter pro Sekunde nach oben könnte durch den Vektor (0, 5) dargestellt werden (in 2 Dimensionen mit dem Positiv y-Achse als ‘oben’). Eine andere durch einen Vektor dargestellte Größe ist die Kraft, da sie eine Größe und Richtung hat und den Regeln der Vektoraddition folgt.[8] Vektoren beschreiben auch viele andere physikalische Größen, wie z. B. lineare Verschiebung, Verschiebung, lineare Beschleunigung, Winkelbeschleunigung, linearer Impuls und Drehimpuls. Andere physikalische Vektoren, wie das elektrische und magnetische Feld, werden als Vektorsystem an jedem Punkt eines physikalischen Raums dargestellt; das heißt, ein Vektorfeld. Beispiele für Größen, die Größe und Richtung haben, aber die Regeln der Vektoraddition nicht befolgen, sind Winkelverschiebung und elektrischer Strom. Folglich sind dies keine Vektoren.
Im kartesischen Raum[edit]
Im kartesischen Koordinatensystem kann ein gebundener Vektor dargestellt werden, indem die Koordinaten seines Anfangs- und Endpunkts identifiziert werden. Zum Beispiel die Punkte EIN = (1, 0, 0) und B. = (0, 1, 0) im Raum bestimmen Sie den gebundenen Vektor
vom Punkt zeigen x = 1 auf der x-Achse auf den Punkt y = 1 auf der y-Achse.
In kartesischen Koordinaten kann ein freier Vektor in diesem Sinne als entsprechender gebundener Vektor betrachtet werden, dessen Anfangspunkt die Koordinaten des Ursprungs hat Ö = (0, 0, 0). Sie wird dann durch die Koordinaten des Endpunkts dieses gebundenen Vektors bestimmt. Somit ist der durch (1, 0, 0) dargestellte freie Vektor ein Vektor mit Längeneinheiten, der entlang der Richtung des Positivs zeigt x-Achse.
Diese Koordinatendarstellung freier Vektoren ermöglicht es, ihre algebraischen Merkmale auf bequeme numerische Weise auszudrücken. Beispielsweise ist die Summe der beiden (freien) Vektoren (1, 2, 3) und (–2, 0, 4) der (freie) Vektor
- (1, 2, 3) + (–2, 0, 4) = (1–2, 2 + 0, 3 + 4) = (–1, 2, 7).
Euklidische und affine Vektoren[edit]
In den geometrischen und physikalischen Umgebungen ist es manchmal möglich, a auf natürliche Weise zu assoziieren Länge oder Größe und eine Richtung zu Vektoren. Darüber hinaus ist der Begriff der Richtung eng mit dem Begriff eines verbunden Winkel zwischen zwei Vektoren. Wenn das Punktprodukt zweier Vektoren definiert ist – ein skalarwertiges Produkt zweier Vektoren -, kann auch eine Länge definiert werden. Das Punktprodukt bietet eine bequeme algebraische Charakterisierung sowohl des Winkels (eine Funktion des Punktprodukts zwischen zwei beliebigen Vektoren ungleich Null) als auch der Länge (der Quadratwurzel des Punktprodukts eines Vektors für sich). In drei Dimensionen ist es ferner möglich, das Kreuzprodukt zu definieren, das eine algebraische Charakterisierung der Fläche und Orientierung im Raum des Parallelogramms liefert, das durch zwei Vektoren definiert ist (die als Seiten des Parallelogramms verwendet werden). In jeder Dimension (und insbesondere in höheren Dimensionen) ist es möglich, das äußere Produkt zu definieren, das (unter anderem) eine algebraische Charakterisierung der Fläche und Orientierung im Raum des liefert n-dimensionales Parallelotop definiert durch n Vektoren.
Es ist jedoch nicht immer möglich oder wünschenswert, die Länge eines Vektors auf natürliche Weise zu definieren. Dieser allgemeinere Typ eines räumlichen Vektors ist Gegenstand von Vektorräumen (für freie Vektoren) und affinen Räumen (für gebundene Vektoren, die jeweils durch ein geordnetes Paar von “Punkten” dargestellt werden). Ein wichtiges Beispiel ist der Minkowski-Raum (der für unser Verständnis der speziellen Relativitätstheorie wichtig ist), in dem es eine Verallgemeinerung der Länge gibt, die es Vektoren ungleich Null ermöglicht, eine Länge von Null zu haben. Andere physikalische Beispiele stammen aus der Thermodynamik, wo viele der interessierenden Größen als Vektoren in einem Raum ohne Vorstellung von Länge oder Winkel betrachtet werden können.[14]
Verallgemeinerungen[edit]
Sowohl in der Physik als auch in der Mathematik wird ein Vektor häufig mit einem Tupel von Komponenten oder einer Liste von Zahlen identifiziert, die als Skalarkoeffizienten für einen Satz von Basisvektoren dienen. Wenn die Basis transformiert wird, beispielsweise durch Drehen oder Strecken, transformieren sich auch die Komponenten eines Vektors in Bezug auf diese Basis in einem entgegengesetzten Sinne. Der Vektor selbst hat sich nicht geändert, aber die Basis hat sich geändert, sodass sich die Komponenten des Vektors ändern müssen, um dies zu kompensieren. Der Vektor heißt kovariant oder kontravarianteabhängig davon, wie die Transformation der Vektorkomponenten mit der Transformation der Basis zusammenhängt. Im Allgemeinen sind kontravariante Vektoren “reguläre Vektoren” mit Entfernungseinheiten (wie einer Verschiebung) oder einer Entfernung mal einer anderen Einheit (wie Geschwindigkeit oder Beschleunigung); Kovariante Vektoren haben andererseits Einheiten von Eins über Distanz, wie z. B. Gradienten. Wenn Sie Einheiten (ein Sonderfall einer Basisänderung) von Metern auf Millimeter, einen Skalierungsfaktor von 1/1000, ändern, wird eine Verschiebung von 1 m zu 1000 mm – eine kontravariante Änderung des numerischen Werts. Im Gegensatz dazu wird ein Gradient von 1 K / m zu 0,001 K / mm – eine kovariante Wertänderung (weitere Informationen finden Sie unter Kovarianz und Kontravarianz von Vektoren). Tensoren sind eine andere Art von Größe, die sich auf diese Weise verhalten. Ein Vektor ist eine Art von Tensor.
In der reinen Mathematik ist ein Vektor ein beliebiges Element eines Vektorraums über einem Feld und wird häufig als Koordinatenvektor dargestellt. Die in diesem Artikel beschriebenen Vektoren sind ein ganz besonderer Fall dieser allgemeinen Definition, da sie in Bezug auf den Umgebungsraum kontravariant sind. Kontravarianz erfasst die physikalische Intuition hinter der Idee, dass ein Vektor “Größe und Richtung” hat.
Darstellungen[edit]

Vektoren werden normalerweise in Fettdruck in Kleinbuchstaben angegeben, wie in
,
 ,
, und
 und
und ,[4] oder in Kleinbuchstaben kursiv fett gedruckt, wie in ein. (Großbuchstaben werden normalerweise zur Darstellung von Matrizen verwendet.) Andere Konventionen umfassen
 ,[4] oder in Kleinbuchstaben kursiv fett gedruckt, wie in ein. (Großbuchstaben werden normalerweise zur Darstellung von Matrizen verwendet.) Andere Konventionen umfassen
,[4] oder in Kleinbuchstaben kursiv fett gedruckt, wie in ein. (Großbuchstaben werden normalerweise zur Darstellung von Matrizen verwendet.) Andere Konventionen umfassen oder einvor allem in der Handschrift. Alternativ verwenden einige eine Tilde (~) oder eine wellenförmige Unterstreichung, die unter dem Symbol gezeichnet ist, z
 oder einvor allem in der Handschrift. Alternativ verwenden einige eine Tilde (~) oder eine wellenförmige Unterstreichung, die unter dem Symbol gezeichnet ist, z
oder einvor allem in der Handschrift. Alternativ verwenden einige eine Tilde (~) oder eine wellenförmige Unterstreichung, die unter dem Symbol gezeichnet ist, z Dies ist eine Konvention zur Angabe des Fettdrucktyps. Wenn der Vektor eine gerichtete Entfernung oder Verschiebung von einem Punkt darstellt EIN bis zu einem Punkt B. (siehe Abbildung) kann auch als bezeichnet werden
 Dies ist eine Konvention zur Angabe des Fettdrucktyps. Wenn der Vektor eine gerichtete Entfernung oder Verschiebung von einem Punkt darstellt EIN bis zu einem Punkt B. (siehe Abbildung) kann auch als bezeichnet werden
Dies ist eine Konvention zur Angabe des Fettdrucktyps. Wenn der Vektor eine gerichtete Entfernung oder Verschiebung von einem Punkt darstellt EIN bis zu einem Punkt B. (siehe Abbildung) kann auch als bezeichnet werden oder AB. In der deutschen Literatur war es besonders üblich, Vektoren mit kleinen Frakturbuchstaben wie z
 oder AB. In der deutschen Literatur war es besonders üblich, Vektoren mit kleinen Frakturbuchstaben wie z
oder AB. In der deutschen Literatur war es besonders üblich, Vektoren mit kleinen Frakturbuchstaben wie z .
 .
.
Vektoren werden normalerweise in Diagrammen oder anderen Diagrammen als Pfeile (gerichtete Liniensegmente) dargestellt, wie in der Abbildung dargestellt. Hier der Punkt EIN heißt das Ursprung, Schwanz, Base, oder Ausgangspunktund der Punkt B. heißt das Kopf, Trinkgeld, Endpunkt, Endpunkt oder letzter Punkt. Die Länge des Pfeils ist proportional zur Größe des Vektors, während die Richtung, in die der Pfeil zeigt, die Richtung des Vektors angibt.

In einem zweidimensionalen Diagramm ist manchmal ein Vektor senkrecht zur Ebene des Diagramms erwünscht. Diese Vektoren werden üblicherweise als kleine Kreise dargestellt. Ein Kreis mit einem Punkt in der Mitte (Unicode U + 2299 ⊙) zeigt einen Vektor an, der von der Vorderseite des Diagramms zum Betrachter zeigt. Ein Kreis mit einem darin eingeschriebenen Kreuz (Unicode U + 2297 ⊗) zeigt einen Vektor an, der in und hinter das Diagramm zeigt. Man kann sich vorstellen, dass man die Spitze einer Pfeilspitze betrachtet und die Flüge eines Pfeils von hinten betrachtet.
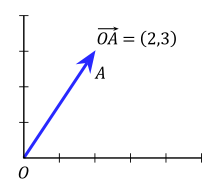

Um mit Vektoren zu berechnen, kann die grafische Darstellung zu umständlich sein. Vektoren in einem n-dimensionaler euklidischer Raum kann als Koordinatenvektor in einem kartesischen Koordinatensystem dargestellt werden. Der Endpunkt eines Vektors kann mit einer geordneten Liste von identifiziert werden n reale Nummern (n-Tupel). Diese Zahlen sind die Koordinaten des Endpunkts des Vektors in Bezug auf ein gegebenes kartesisches Koordinatensystem und werden typischerweise als bezeichnet skalare Komponenten (oder Skalarprojektionen) des Vektors auf den Achsen des Koordinatensystems.
Als Beispiel in zwei Dimensionen (siehe Abbildung) der Vektor vom Ursprung Ö = (0, 0) auf den Punkt EIN = (2, 3) wird einfach geschrieben als

Die Vorstellung, dass der Schwanz des Vektors mit dem Ursprung übereinstimmt, ist implizit und leicht zu verstehen. Also die explizitere Notation
wird normalerweise als nicht notwendig erachtet (und wird in der Tat selten verwendet).
 wird normalerweise als nicht notwendig erachtet (und wird in der Tat selten verwendet).
wird normalerweise als nicht notwendig erachtet (und wird in der Tat selten verwendet).
Im dreidimensional Euklidischer Raum (oder R.3) werden Vektoren mit Tripeln skalarer Komponenten identifiziert:
- auch geschrieben


Dies kann verallgemeinert werden auf n-dimensional Euklidischer Raum (oder R.n).

Diese Zahlen werden häufig wie folgt in einem Spalten- oder Zeilenvektor angeordnet, insbesondere wenn es sich um Matrizen handelt:
![{ displaystyle mathbf {a} = { begin {bmatrix} a_ {1} \ a_ {2} \ a_ {3} \ end {bmatrix}} =[a_{1} a_{2} a_{3}]^ { operatorname {T}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a4d592431150c7ec8a51217d87dae2ed1224df2)
Eine andere Möglichkeit, einen Vektor in darzustellen n-dimensions dient zur Einführung der Standardbasisvektoren. Zum Beispiel gibt es in drei Dimensionen drei davon:

Diese haben die intuitive Interpretation als Vektoren der Längeneinheit, die nach oben zeigen x-, y-, und z-Achse eines kartesischen Koordinatensystems. In Bezug auf diese, jeder Vektor ein im R.3 kann ausgedrückt werden in der Form:

oder

wo ein1, ein2, ein3 werden die genannt Vektorkomponenten (oder Vektorprojektionen) von ein auf der Basis von Vektoren oder äquivalent auf den entsprechenden kartesischen Achsen x, y, und z (siehe Abbildung), während ein1, ein2, ein3 sind die jeweiligen Skalarkomponenten (oder Skalarprojektionen).
In einführenden Physiklehrbüchern werden häufig die Standardbasisvektoren bezeichnet
stattdessen (oder
 stattdessen (oder
stattdessen (oder , in dem das Hutsymbol ^ bezeichnet typischerweise Einheitsvektoren). In diesem Fall werden die Skalar- bzw. Vektorkomponenten bezeichnet einx, einy, einz, und einx, einy, einz (Beachten Sie den Unterschied in Fettdruck). So,
 , in dem das Hutsymbol ^ bezeichnet typischerweise Einheitsvektoren). In diesem Fall werden die Skalar- bzw. Vektorkomponenten bezeichnet einx, einy, einz, und einx, einy, einz (Beachten Sie den Unterschied in Fettdruck). So,
, in dem das Hutsymbol ^ bezeichnet typischerweise Einheitsvektoren). In diesem Fall werden die Skalar- bzw. Vektorkomponenten bezeichnet einx, einy, einz, und einx, einy, einz (Beachten Sie den Unterschied in Fettdruck). So,

Die Notation eich ist kompatibel mit der Indexnotation und der Summationskonvention, die üblicherweise in Mathematik, Physik und Ingenieurwissenschaften auf höherer Ebene verwendet werden.
Zersetzung oder Auflösung[edit]
Wie oben erläutert, wird ein Vektor häufig durch einen Satz von Vektorkomponenten beschrieben, die sich zu dem gegebenen Vektor addieren. Typischerweise sind diese Komponenten die Projektionen des Vektors auf einen Satz von senkrecht zueinander stehenden Referenzachsen (Basisvektoren). Der Vektor soll sein zersetzt oder gelöst in Bezug auf das Set.
Die Zerlegung oder Auflösung[15] Die Einteilung eines Vektors in Komponenten ist nicht eindeutig, da dies von der Wahl der Achsen abhängt, auf die der Vektor projiziert wird.
Darüber hinaus kann die Verwendung von kartesischen Einheitsvektoren wie z
als Grundlage für die Darstellung eines Vektors ist nicht vorgeschrieben. Vektoren können auch auf einer beliebigen Basis ausgedrückt werden, einschließlich der Einheitsvektoren eines Zylinderkoordinatensystems (
) oder sphärisches Koordinatensystem (
 ) oder sphärisches Koordinatensystem (
) oder sphärisches Koordinatensystem (). Die beiden letztgenannten Optionen eignen sich besser zum Lösen von Problemen mit zylindrischer bzw. sphärischer Symmetrie.
 ). Die beiden letztgenannten Optionen eignen sich besser zum Lösen von Problemen mit zylindrischer bzw. sphärischer Symmetrie.
). Die beiden letztgenannten Optionen eignen sich besser zum Lösen von Problemen mit zylindrischer bzw. sphärischer Symmetrie.
Die Wahl einer Basis hat keinen Einfluss auf die Eigenschaften eines Vektors oder sein Verhalten bei Transformationen.
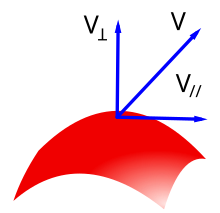
Ein Vektor kann auch in Bezug auf “nicht feste” Basisvektoren aufgeteilt werden, die ihre Ausrichtung als Funktion von Zeit oder Raum ändern. Beispielsweise kann ein Vektor im dreidimensionalen Raum in Bezug auf zwei Achsen zerlegt werden normal, und Tangente zu einer Oberfläche (siehe Abbildung). Darüber hinaus ist die radial und tangentiale Komponenten eines Vektors beziehen sich auf die Drehradius eines Objekts. Ersteres verläuft parallel zum Radius und letzteres ist orthogonal dazu.[16]
In diesen Fällen kann jede der Komponenten wiederum in Bezug auf ein festes Koordinatensystem oder einen festen Basissatz zerlegt werden (z. B. a global Koordinatensystem oder Trägheitsreferenzrahmen).
Grundeigenschaften[edit]
Der folgende Abschnitt verwendet das kartesische Koordinatensystem mit Basisvektoren

und nimmt an, dass alle Vektoren den Ursprung als gemeinsamen Basispunkt haben. Ein Vektor ein wird geschrieben als

Gleichberechtigung[edit]
Zwei Vektoren gelten als gleich, wenn sie die gleiche Größe und Richtung haben. Gleichermaßen sind sie gleich, wenn ihre Koordinaten gleich sind. Also zwei Vektoren

und

sind gleich wenn

Gegenüberliegende, parallele und antiparallele Vektoren[edit]
Zwei Vektoren sind entgegengesetzt, wenn sie die gleiche Größe, aber die entgegengesetzte Richtung haben. Also zwei Vektoren
und
sind gegenüber, wenn

Zwei Vektoren sind parallel, wenn sie dieselbe Richtung, aber nicht unbedingt dieselbe Größe haben, oder antiparallel, wenn sie eine entgegengesetzte Richtung haben, aber nicht unbedingt dieselbe Größe.
Addition und Subtraktion[edit]
Nehmen wir jetzt das an ein und b sind nicht unbedingt gleiche Vektoren, sondern können unterschiedliche Größen und Richtungen haben. Die Summe von ein und b ist

Die Addition kann grafisch dargestellt werden, indem das Ende des Pfeils platziert wird b an der Spitze des Pfeils einund dann einen Pfeil aus dem Schwanz von ein an den Kopf von b. Der neu gezeichnete Pfeil repräsentiert den Vektor ein + b, wie unten dargestellt:[8]

Diese Additionsmethode wird manchmal als bezeichnet Parallelogrammregel weil ein und b bilden die Seiten eines Parallelogramms und ein + b ist eine der Diagonalen. Wenn ein und b sind gebundene Vektoren, die den gleichen Basispunkt haben, wird dieser Punkt auch der Basispunkt von sein ein + b. Das kann man geometrisch überprüfen ein + b = b + ein und (ein + b) + c = ein + ((b + c).
Der Unterschied von ein und b ist

Die Subtraktion von zwei Vektoren kann wie folgt geometrisch dargestellt werden: Subtrahieren b von ein, platzieren Sie die Schwänze von ein und b an der gleichen Stelle, und ziehen Sie dann einen Pfeil von der Spitze von b an den Kopf von ein. Dieser neue Pfeil repräsentiert den Vektor (-b) + einmit (-b) das Gegenteil von sein b, Zeichnung sehen. Und (-b) + ein = ein – – b.

Skalarmultiplikation[edit]

Ein Vektor kann auch multipliziert oder erneut verwendet werdenskaliertdurch eine reelle Zahl r. Im Kontext der konventionellen Vektoralgebra werden diese reellen Zahlen häufig genannt Skalare (von Rahmen), um sie von Vektoren zu unterscheiden. Die Operation des Multiplizierens eines Vektors mit einem Skalar wird aufgerufen Skalarmultiplikation. Der resultierende Vektor ist

Intuitiv mit einem Skalar multiplizieren r streckt einen Vektor um einen Faktor von aus r. Geometrisch kann dies visualisiert werden (zumindest in dem Fall, wenn r ist eine ganze Zahl) als Platzierung r Kopien des Vektors in einer Linie, in der der Endpunkt eines Vektors der Anfangspunkt des nächsten Vektors ist.
Wenn r negativ ist, ändert der Vektor die Richtung: Er dreht sich um einen Winkel von 180 °. Zwei Beispiele (r = −1 und r = 2) sind unten angegeben:

Die Skalarmultiplikation verteilt sich über die Vektoraddition im folgenden Sinne: r((ein + b) = rein + rb für alle Vektoren ein und b und alle Skalare r. Das kann man auch zeigen ein – – b = ein + (−1)b.
Länge[edit]
Das Länge oder Größe oder Norm des Vektors ein wird mit ‖ bezeichnetein‖ Oder seltener |ein|, was nicht mit dem Absolutwert (einer skalaren “Norm”) zu verwechseln ist.
Die Länge des Vektors ein kann mit der euklidischen Norm berechnet werden

Dies ist eine Folge des Satzes von Pythagoras seit den Basisvektoren e1, e2, e3 sind orthogonale Einheitsvektoren.
Dies ist zufällig gleich der Quadratwurzel des unten diskutierten Punktprodukts des Vektors mit sich selbst:

- Einheitsvektor

EIN Einheitsvektor ist ein beliebiger Vektor mit einer Länge von eins; Normalerweise werden Einheitsvektoren einfach verwendet, um die Richtung anzuzeigen. Ein Vektor beliebiger Länge kann durch seine Länge geteilt werden, um einen Einheitsvektor zu erzeugen.[17] Dies ist bekannt als normalisieren ein Vektor. Ein Einheitsvektor wird oft mit einem Hut wie in angezeigt ein.
Einen Vektor normalisieren ein = (ein1, ein2, ein3)skalieren Sie den Vektor um den Kehrwert seiner Länge ‖ein‖. Das ist:

- Nullvektor
Das Nullvektor ist der Vektor mit der Länge Null. In Koordinaten geschrieben ist der Vektor (0, 0, 0)und es wird allgemein bezeichnet
, 0oder einfach 0.[4] Im Gegensatz zu jedem anderen Vektor hat er eine beliebige oder unbestimmte Richtung und kann nicht normalisiert werden (dh es gibt keinen Einheitsvektor, der ein Vielfaches des Nullvektors ist). Die Summe des Nullvektors mit einem beliebigen Vektor ein ist ein (das ist, 0 + ein = ein).
 , 0oder einfach 0.[4] Im Gegensatz zu jedem anderen Vektor hat er eine beliebige oder unbestimmte Richtung und kann nicht normalisiert werden (dh es gibt keinen Einheitsvektor, der ein Vielfaches des Nullvektors ist). Die Summe des Nullvektors mit einem beliebigen Vektor ein ist ein (das ist,
, 0oder einfach 0.[4] Im Gegensatz zu jedem anderen Vektor hat er eine beliebige oder unbestimmte Richtung und kann nicht normalisiert werden (dh es gibt keinen Einheitsvektor, der ein Vielfaches des Nullvektors ist). Die Summe des Nullvektors mit einem beliebigen Vektor ein ist ein (das ist, Skalarprodukt[edit]
Das Skalarprodukt von zwei Vektoren ein und b (manchmal auch als bezeichnet Innenprodukt, oder, da sein Ergebnis ein Skalar ist, die Skalarprodukt) wird mit bezeichnet ein ∙ b,[4] und ist definiert als:

wo θ ist das Maß für den Winkel zwischen ein und b (Eine Erklärung des Kosinus finden Sie in der trigonometrischen Funktion.) Geometrisch bedeutet dies, dass ein und b werden mit einem gemeinsamen Startpunkt gezeichnet, und dann die Länge von ein wird mit der Länge der Komponente von multipliziert b das zeigt in die gleiche Richtung wie ein.
Das Punktprodukt kann auch als die Summe der Produkte der Komponenten jedes Vektors als definiert werden

Kreuzprodukt[edit]
Das Kreuzprodukt (auch die genannt Vektorprodukt oder Außenprodukt) ist nur in drei oder sieben Dimensionen sinnvoll. Das Kreuzprodukt unterscheidet sich vom Punktprodukt hauptsächlich dadurch, dass das Ergebnis des Kreuzprodukts zweier Vektoren ein Vektor ist. Das bezeichnete Kreuzprodukt ein × bist ein Vektor senkrecht zu beiden ein und b und ist definiert als

wo θ ist das Maß für den Winkel zwischen ein und b, und n ist ein Einheitsvektor senkrecht zu beiden ein und b das vervollständigt ein rechtshändiges System. Die Einschränkung der Rechtshändigkeit ist erforderlich, da sie vorhanden ist zwei Einheitsvektoren, die senkrecht zu beiden sind ein und bnämlich. n und (-n).

Das Kreuzprodukt ein × b ist so definiert, dass ein, b, und ein × b wird auch ein rechtshändiges System (obwohl ein und b sind nicht unbedingt orthogonal). Dies ist die rechte Regel.
Die Länge von ein × b kann als die Fläche des Parallelogramms mit interpretiert werden ein und b als Seiten.
Das Kreuzprodukt kann geschrieben werden als

Für willkürliche Entscheidungen der räumlichen Ausrichtung (dh für linkshändige und rechtshändige Koordinatensysteme) ist das Kreuzprodukt zweier Vektoren ein Pseudovektor anstelle eines Vektors (siehe unten).
Skalares Dreifachprodukt[edit]
Das skalares dreifaches Produkt (auch die genannt Box Produkt oder gemischtes dreifaches Produkt) ist nicht wirklich ein neuer Operator, sondern eine Möglichkeit, die beiden anderen Multiplikationsoperatoren auf drei Vektoren anzuwenden. Das skalare Dreifachprodukt wird manchmal mit (ein b c) und definiert als:

Es hat drei Hauptverwendungen. Erstens ist der absolute Wert des Boxprodukts das Volumen des Parallelepipeds, dessen Kanten durch die drei Vektoren definiert sind. Zweitens ist das skalare Tripelprodukt genau dann Null, wenn die drei Vektoren linear abhängig sind, was leicht bewiesen werden kann, wenn man bedenkt, dass die drei Vektoren, damit sie kein Volumen bilden, alle in derselben Ebene liegen müssen. Drittens ist das Boxprodukt genau dann positiv, wenn die drei Vektoren ein, b und c sind Rechtshänder.
In Komponenten (in Bezug auf eine rechtshändige orthonormale Basis) Wenn die drei Vektoren als Zeilen (oder Spalten, aber in derselben Reihenfolge) betrachtet werden, ist das skalare Tripelprodukt einfach die Determinante der 3-mal-3-Matrix mit den drei Vektoren als Zeilen

Das skalare Dreifachprodukt ist in allen drei Einträgen linear und im folgenden Sinne antisymmetrisch:

Umwandlung zwischen mehreren kartesischen Basen[edit]
Alle bisherigen Beispiele haben sich mit Vektoren befasst, die auf derselben Basis ausgedrückt wurden, nämlich der e Basis {e1, e2, e3}. Ein Vektor kann jedoch in Form einer beliebigen Anzahl verschiedener Basen ausgedrückt werden, die nicht unbedingt miteinander ausgerichtet sind und dennoch der gleiche Vektor bleiben. In dem e Basis ein Vektor ein wird per Definition ausgedrückt als
- .

Die Skalarkomponenten in der e Basis sind per Definition,
- ,
- ,
- .



Auf einer anderen orthonormalen Basis n = {n1, n2, n3} das ist nicht unbedingt ausgerichtet mit e, der Vektor ein wird ausgedrückt als

und die skalaren Komponenten in der n Basis sind per Definition,
- ,
- ,
- .



Die Werte von p, q, r, und u, v, w beziehen sich auf die Einheitsvektoren so, dass die resultierende Vektorsumme genau der gleiche physikalische Vektor ist ein in beiden Fällen. Es ist üblich, Vektoren zu treffen, die in Bezug auf verschiedene Basen bekannt sind (zum Beispiel eine Basis, die an der Erde befestigt ist, und eine zweite Basis, die an einem sich bewegenden Fahrzeug befestigt ist). In einem solchen Fall ist es notwendig, ein Verfahren zum Konvertieren zwischen Basen zu entwickeln, damit die grundlegenden Vektoroperationen wie Addition und Subtraktion ausgeführt werden können. Ein Weg, um auszudrücken u, v, w bezüglich p, q, r besteht darin, Spaltenmatrizen zusammen mit einer Richtungskosinusmatrix zu verwenden, die die Informationen enthält, die die beiden Basen in Beziehung setzen. Ein solcher Ausdruck kann durch Ersetzen der obigen Gleichungen gebildet werden, um sich zu bilden
- ,
- ,
- .



Das Verteilen der Punktmultiplikation ergibt
- ,
- ,
- .



Das Ersetzen jedes Punktprodukts durch einen eindeutigen Skalar ergibt
- ,
- ,
- ,



und diese Gleichungen können als Einzelmatrixgleichung ausgedrückt werden
- .

Diese Matrixgleichung bezieht sich auf die Skalarkomponenten von ein in dem n Basis (u,v, und w) mit denen in der e Basis (p, q, und r). Jedes Matrixelement cjk ist die Richtung Cosinus in Bezug nj zu ek.[18] Der Begriff Richtung Kosinus bezieht sich auf den Kosinus des Winkels zwischen zwei Einheitsvektoren, der auch gleich ihrem Punktprodukt ist.[18] Deshalb,









Indem wir uns gemeinsam auf beziehen e1, e2, e3 als die e Basis und zu n1, n2, n3 als die n Basis enthält die Matrix alle cjk ist bekannt als “Transformationsmatrix von e zu n“, oder der “Rotationsmatrix von e zu n“(weil es sich als” Rotation “eines Vektors von einer Basis zur anderen vorstellen lässt) oder”Richtungskosinusmatrix von e zu n“”[18] (weil es Richtungskosinus enthält). Die Eigenschaften einer Rotationsmatrix sind so, dass ihre Inverse gleich ihrer Transponierten ist. Dies bedeutet, dass die “Rotationsmatrix aus e zu n“ist die Transponierte von” Rotationsmatrix aus n zu e“.
Die Eigenschaften einer Richtungskosinusmatrix C sind:[19]
- die Determinante ist die Einheit | C | = 1
- die Umkehrung ist gleich der Transponierten,
- Die Zeilen und Spalten sind orthogonale Einheitsvektoren, daher sind ihre Punktprodukte Null.
Der Vorteil dieses Verfahrens besteht darin, dass eine Richtungskosinusmatrix normalerweise unabhängig erhalten werden kann, indem Eulerwinkel oder eine Quaternion verwendet werden, um die beiden Vektorbasen in Beziehung zu setzen, so dass die Basiskonvertierungen direkt durchgeführt werden können, ohne dass alle oben beschriebenen Punktprodukte berechnet werden müssen .
Durch aufeinanderfolgendes Anwenden mehrerer Matrixmultiplikationen kann jeder Vektor auf jeder Basis ausgedrückt werden, solange der Satz von Richtungskosinussen bekannt ist, die die aufeinanderfolgenden Basen betreffen.[18]
Andere Abmessungen[edit]
Mit Ausnahme der Kreuz- und Dreifachprodukte verallgemeinern sich die obigen Formeln auf zwei Dimensionen und höhere Dimensionen. Zum Beispiel verallgemeinert die Addition auf zwei Dimensionen als

und in vier Dimensionen als

Das Kreuzprodukt lässt sich nicht ohne weiteres auf andere Dimensionen verallgemeinern, obwohl dies das eng verwandte Außenprodukt tut, dessen Ergebnis ein Bivektor ist. In zwei Dimensionen ist dies einfach ein Pseudoskalar

Ein siebendimensionales Kreuzprodukt ähnelt dem Kreuzprodukt darin, dass sein Ergebnis ein Vektor ist, der orthogonal zu den beiden Argumenten ist. Es gibt jedoch keine natürliche Möglichkeit, eines der möglichen derartigen Produkte auszuwählen.
Physik[edit]
Vektoren haben viele Anwendungen in der Physik und anderen Wissenschaften.
Länge und Einheiten[edit]
In abstrakten Vektorräumen hängt die Länge des Pfeils von einer dimensionslosen Skala ab. Wenn es zum Beispiel eine Kraft darstellt, hat die “Skala” die physikalische Dimension Länge / Kraft. Somit besteht typischerweise eine Konsistenz in der Skalierung zwischen Mengen derselben Dimension, andernfalls können die Skalierungsverhältnisse variieren; Wenn beispielsweise “1 Newton” und “5 m” beide mit einem Pfeil von 2 cm dargestellt werden, betragen die Maßstäbe 1 m: 50 N bzw. 1: 250. Die gleiche Länge von Vektoren unterschiedlicher Dimension hat keine besondere Bedeutung, es sei denn, dem System, das das Diagramm darstellt, ist eine Proportionalitätskonstante inhärent. Auch die Länge eines Einheitsvektors (der Dimensionslänge, nicht der Länge / Kraft usw.) hat keine koordinatensysteminvariante Bedeutung.
Vektorwertige Funktionen[edit]
In Bereichen der Physik und Mathematik entwickelt sich ein Vektor häufig mit der Zeit, was bedeutet, dass er von einem Zeitparameter abhängt t. Zum Beispiel, wenn r repräsentiert dann den Positionsvektor eines Teilchens r((t) gibt eine parametrische Darstellung der Flugbahn des Partikels. Vektorwertige Funktionen können durch Differenzieren oder Integrieren der Komponenten des Vektors differenziert und integriert werden, und viele der bekannten Regeln aus dem Kalkül gelten weiterhin für die Ableitung und das Integral von vektorwertigen Funktionen.
Position, Geschwindigkeit und Beschleunigung[edit]
Die Position eines Punktes x = (x1, x2, x3) im dreidimensionalen Raum kann als Positionsvektor dargestellt werden, dessen Basispunkt der Ursprung ist

Der Positionsvektor hat Längenmaße.
Gegeben zwei Punkte x = (x1, x2, x3), y = (y1, y2, y3) ihre Verschiebung ist ein Vektor

welches die Position von angibt y relativ zu x. Die Länge dieses Vektors gibt den geradlinigen Abstand von an x zu y. Die Verschiebung hat die Abmessungen der Länge.
Die Geschwindigkeit v eines Punktes oder Teilchens ist ein Vektor, dessen Länge die Geschwindigkeit angibt. Bei konstanter Geschwindigkeit die Position zum Zeitpunkt t wird sein

wo x0 ist die Position zum Zeitpunkt t = 0. Geschwindigkeit ist die zeitliche Ableitung der Position. Seine Abmessungen sind Länge / Zeit.
Beschleunigung ein eines Punktes ist ein Vektor, der die zeitliche Ableitung der Geschwindigkeit ist. Seine Abmessungen sind Länge / Zeit2.
Kraft, Energie, Arbeit[edit]
Kraft ist ein Vektor mit Dimensionen von Masse × Länge / Zeit2 und Newtons zweites Gesetz ist die Skalarmultiplikation

Arbeit ist das Punktprodukt von Kraft und Verschiebung

Vektoren, Pseudovektoren und Transformationen[edit]
Eine alternative Charakterisierung euklidischer Vektoren, insbesondere in der Physik, beschreibt sie als Listen von Größen, die sich unter einer Koordinatentransformation auf bestimmte Weise verhalten. EIN kontravarianter Vektor ist erforderlich, um Komponenten zu haben, die sich bei Basisänderungen “entgegengesetzt zur Basis transformieren”. Der Vektor selbst ändert sich nicht, wenn die Basis transformiert wird. Stattdessen nehmen die Komponenten des Vektors eine Änderung vor, die die Änderung in der Basis aufhebt. Mit anderen Worten, wenn die Referenzachsen (und die daraus abgeleitete Basis) in eine Richtung gedreht würden, würde sich die Komponentendarstellung des Vektors in die entgegengesetzte Weise drehen, um denselben Endvektor zu erzeugen. In ähnlicher Weise würden sich die Komponenten des Vektors auf genau kompensierende Weise verringern, wenn die Referenzachsen in eine Richtung gestreckt würden. Mathematisch, wenn die Basis eine Transformation durchläuft, die durch eine invertierbare Matrix beschrieben wird M., so dass ein Koordinatenvektor x verwandelt sich in x‘= M.xdann ein kontravarianter Vektor v muss in ähnlicher Weise über transformiert werden v‘= M.
v. Diese wichtige Anforderung unterscheidet einen kontravarianten Vektor von jedem anderen Dreifach physikalisch bedeutsamer Größen. Zum Beispiel wenn v besteht aus dem x, y, und z-Komponenten der Geschwindigkeit also v ist ein kontravarianter Vektor: Wenn die Koordinaten des Raums gedehnt, gedreht oder verdreht werden, transformieren sich die Komponenten der Geschwindigkeit auf dieselbe Weise. Andererseits könnte beispielsweise ein Tripel, das aus der Länge, Breite und Höhe eines rechteckigen Kastens besteht, die drei Komponenten eines abstrakten Vektors bilden, aber dieser Vektor wäre nicht kontravariant, da das Drehen des Kastens das nicht ändert Länge, Breite und Höhe der Box. Beispiele für kontravariante Vektoren umfassen Verschiebung, Geschwindigkeit, elektrisches Feld, Impuls, Kraft und Beschleunigung.
 v. Diese wichtige Anforderung unterscheidet einen kontravarianten Vektor von jedem anderen Dreifach physikalisch bedeutsamer Größen. Zum Beispiel wenn v besteht aus dem x, y, und z-Komponenten der Geschwindigkeit also v ist ein kontravarianter Vektor: Wenn die Koordinaten des Raums gedehnt, gedreht oder verdreht werden, transformieren sich die Komponenten der Geschwindigkeit auf dieselbe Weise. Andererseits könnte beispielsweise ein Tripel, das aus der Länge, Breite und Höhe eines rechteckigen Kastens besteht, die drei Komponenten eines abstrakten Vektors bilden, aber dieser Vektor wäre nicht kontravariant, da das Drehen des Kastens das nicht ändert Länge, Breite und Höhe der Box. Beispiele für kontravariante Vektoren umfassen Verschiebung, Geschwindigkeit, elektrisches Feld, Impuls, Kraft und Beschleunigung.
v. Diese wichtige Anforderung unterscheidet einen kontravarianten Vektor von jedem anderen Dreifach physikalisch bedeutsamer Größen. Zum Beispiel wenn v besteht aus dem x, y, und z-Komponenten der Geschwindigkeit also v ist ein kontravarianter Vektor: Wenn die Koordinaten des Raums gedehnt, gedreht oder verdreht werden, transformieren sich die Komponenten der Geschwindigkeit auf dieselbe Weise. Andererseits könnte beispielsweise ein Tripel, das aus der Länge, Breite und Höhe eines rechteckigen Kastens besteht, die drei Komponenten eines abstrakten Vektors bilden, aber dieser Vektor wäre nicht kontravariant, da das Drehen des Kastens das nicht ändert Länge, Breite und Höhe der Box. Beispiele für kontravariante Vektoren umfassen Verschiebung, Geschwindigkeit, elektrisches Feld, Impuls, Kraft und Beschleunigung.
In der Sprache der Differentialgeometrie entspricht die Anforderung, dass sich die Komponenten eines Vektors gemäß derselben Matrix des Koordinatenübergangs transformieren, der Definition von a kontravarianter Vektor ein Tensor von kontravarianten Rang eins zu sein. Alternativ wird ein Kontravariantenvektor als Tangentenvektor definiert, und die Regeln zum Transformieren eines Kontravariantenvektors folgen aus der Kettenregel.
Einige Vektoren transformieren sich wie kontravariante Vektoren, außer dass sie sich drehen, wenn sie durch einen Spiegel reflektiert werden und ein Minuszeichen erhalten. Eine Transformation, die Rechtshändigkeit auf Linkshändigkeit umschaltet und umgekehrt, wie es ein Spiegel tut, soll das ändern Orientierung Raum. Ein Vektor, der ein Minuszeichen erhält, wenn sich die Ausrichtung des Raums ändert, wird als a bezeichnet Pseudovektor oder ein axialer Vektor. Gewöhnliche Vektoren werden manchmal genannt wahre Vektoren oder polare Vektoren um sie von Pseudovektoren zu unterscheiden. Pseudovektoren treten am häufigsten als Kreuzprodukt zweier gewöhnlicher Vektoren auf.
Ein Beispiel für einen Pseudovektor ist die Winkelgeschwindigkeit. Wenn Sie in einem Auto fahren und nach vorne schauen, hat jedes der Räder einen Winkelgeschwindigkeitsvektor, der nach links zeigt. Wenn sich die Welt in einem Spiegel spiegelt, der die linke und rechte Seite des Autos wechselt, wird die Betrachtung dieses Winkelgeschwindigkeitsvektors zeigt nach rechts, aber der tatsächlich Der Winkelgeschwindigkeitsvektor des Rades zeigt immer noch nach links, entsprechend dem Minuszeichen. Andere Beispiele für Pseudovektoren umfassen Magnetfeld, Drehmoment oder allgemeiner jedes Kreuzprodukt zweier (wahrer) Vektoren.
Diese Unterscheidung zwischen Vektoren und Pseudovektoren wird oft ignoriert, wird jedoch bei der Untersuchung der Symmetrieeigenschaften wichtig. Siehe Parität (Physik).
Siehe auch[edit]
- ^ Ivanov 2001
- ^ Heinbockel 2001
- ^ Itô 1993, p. 1678; Pedoe 1988
- ^ ein b c d “Kompendium der mathematischen Symbole”. Math Vault. 2020-03-01. Abgerufen 2020-08-19.
- ^ Lateinisch: vectus, perfektes Partizip von vehere, “tragen” / veho = “Ich trage”. Zur historischen Entwicklung des Wortes Vektor, sehen “Vektor n.“”. Oxford Englisch Wörterbuch (Online-Ausgabe). Oxford University Press. (Abonnement oder teilnehmende Institution Mitgliedschaft erforderlich.) und Jeff Miller. “Früheste bekannte Verwendung einiger der Wörter der Mathematik”. Abgerufen 2007-05-25.
- ^ Das Oxford Englisch Wörterbuch (2. Aufl.). London: Claredon Press. 2001. ISBN 9780195219425.
- ^ ein b “Vektor | Definition & Fakten”. Enzyklopädie Britannica. Abgerufen 2020-08-19.
- ^ ein b c “Vektoren”. www.mathsisfun.com. Abgerufen 2020-08-19.
- ^ Weisstein, Eric W. “Vektor”. mathworld.wolfram.com. Abgerufen 2020-08-19.
- ^ ein b c d Michael J. Crowe, Eine Geschichte der Vektoranalyse; siehe auch seine “Vorlesungsnotizen” (PDF). Archiviert von das Original (PDF) am 26. Januar 2004. Abgerufen 04.09.2010. zum Thema.
- ^ WR Hamilton (1846) London, Edinburgh & Dublin Philosophical Magazine 3. Serie 29 27
- ^ Itô 1993, p. 1678
- ^ Früher bekannt als lokalisierter Vektor. Siehe Lang 1986, p. 9.
- ^ Thermodynamik und Differentialformen
- ^ Gibbs, JW (1901). Vektoranalyse: Ein Lehrbuch für Studenten der Mathematik und Physik, das auf den Vorlesungen von J. Willard Gibbs basiert, von EB Wilson, Chares Scribner’s Sons, New York, p. 15: “Beliebiger Vektor r koplanar mit zwei nicht kollinearen Vektoren ein und b kann in zwei Komponenten parallel zu aufgelöst werden ein und b beziehungsweise. Diese Auflösung kann durch Erstellen des Parallelogramms erreicht werden … “
- ^ U. Guelph Physics Dept., “Drehmoment- und Winkelbeschleunigung”
- ^ 1.1: Vektoren. Mathematik LibreTexts. 2013-11-07. Abgerufen 2020-08-19.
- ^ ein b c d Kane & Levinson 1996, S. 20–22
- ^ M., Rogers, Robert (2007). Angewandte Mathematik in integrierten Navigationssystemen (3. Aufl.). Reston, Va.: Amerikanisches Institut für Luft- und Raumfahrt. ISBN 9781563479274. OCLC 652389481.
Verweise[edit]
Mathematische Behandlungen[edit]
- Apostol, Tom (1967). Infinitesimalrechnung. Vol. 1: Einvariablenrechnung mit Einführung in die lineare Algebra. Wiley. ISBN 978-0-471-00005-1.CS1-Wartung: ref = harv (Link)
- Apostol, Tom (1969). Infinitesimalrechnung. Vol. 2: Multi-Variablen-Kalkül und lineare Algebra mit Anwendungen. Wiley. ISBN 978-0-471-00007-5.CS1-Wartung: ref = harv (Link)
- Heinbockel, JH (2001), Einführung in die Tensorrechnung und die Kontinuumsmechanik, Trafford Publishing, ISBN 1-55369-133-4.
- Itô, Kiyosi (1993), Enzyklopädisches Wörterbuch der Mathematik (2. Aufl.), MIT Press, ISBN 978-0-262-59020-4.
- Ivanov, AB (2001) [1994], “Vektor”, Enzyklopädie der Mathematik, EMS Press.
- Kane, Thomas R.; Levinson, David A. (1996), Dynamik online, Sunnyvale, Kalifornien: OnLine Dynamics.
- Lang, Serge (1986). Einführung in die lineare Algebra (2. Aufl.). Springer. ISBN 0-387-96205-0.CS1-Wartung: ref = harv (Link)
- Pedoe, Daniel (1988). Geometrie: Ein umfassender Kurs. Dover. ISBN 0-486-65812-0.CS1-Wartung: ref = harv (Link)
Körperliche Behandlungen[edit]
Externe Links[edit]
| Wikimedia Commons hat Medien im Zusammenhang mit Vektoren. |
Recent Comments