Sekundäres Überwachungsradar – Wikipedia
Radarsystem für die Flugsicherung



Sekundäres Überwachungsradar ((SSR)[1] ist ein Radarsystem, das in der Flugsicherung (ATC) verwendet wird und im Gegensatz zu primären Radarsystemen, die die Peilung und Entfernung von Zielen unter Verwendung der erfassten Reflexionen von Funksignalen messen, auf Zielen beruht, die mit einem Radartransponder ausgestattet sind und auf jedes Abfragesignal mit antworten Übertragen von codierten Daten wie einem Identitätscode, der Höhe des Flugzeugs und weiteren Informationen in Abhängigkeit von dem gewählten Modus. SSR basiert auf der IFF-Technologie (Military Identification Friend or Foe), die ursprünglich während des Zweiten Weltkriegs entwickelt wurde. Daher sind die beiden Systeme weiterhin kompatibel. Monopuls-Sekundärüberwachungsradar ((MSSR), Modus S., TCAS und ADS-B sind ähnliche moderne Methoden der Sekundärüberwachung.
Überblick[edit]
Primärradar[edit]
Die rasche Entwicklung des Radars während des Krieges hatte offensichtliche Anwendungen für die Flugsicherung (ATC) als Mittel zur kontinuierlichen Überwachung der Flugverkehrsdisposition. Eine genaue Kenntnis der Positionen von Flugzeugen würde eine Reduzierung der normalen Verfahrenstrennungsstandards ermöglichen, was wiederum eine erhebliche Steigerung der Effizienz des Atemwegssystems versprach. Diese Art von Radar (jetzt a genannt Primärradar) kann die Position von allem erkennen und melden, was die übertragenen Funksignale widerspiegelt, einschließlich je nach Design Flugzeuge, Vögel, Wetter und Landmerkmale. Für die Flugsicherung ist dies sowohl ein Vorteil als auch ein Nachteil. Seine Ziele müssen nicht zusammenarbeiten, sie müssen sich nur innerhalb seiner Reichweite befinden und Funkwellen reflektieren können, aber es zeigt nur die Position der Ziele an, es identifiziert sie nicht. Wenn Primärradar der einzige verfügbare Radartyp war, wurde die Korrelation der einzelnen Radarrückgaben mit bestimmten Flugzeugen typischerweise dadurch erreicht, dass die Steuerung eine gerichtete Drehung des Flugzeugs beobachtete. Das Primärradar wird von ATC noch heute als Backup- / Komplementärsystem zum Sekundärradar verwendet, obwohl seine Abdeckung und Informationen eingeschränkter sind.[2][3][4]
Sekundärradar[edit]


Die Notwendigkeit, Flugzeuge einfacher und zuverlässiger identifizieren zu können, führte zu einer weiteren Radarentwicklung in Kriegszeiten, dem IFF-System (Identification Friend or Foe), das entwickelt wurde, um freundliche Flugzeuge anhand von Unbekannten eindeutig zu identifizieren. Dieses System, das im zivilen Einsatz als sekundäres Überwachungsradar (SSR) oder in den USA als Flugsicherungsradar-Beacon-System (ATCRBS) bekannt wurde, stützt sich auf ein Gerät an Bord des Flugzeugs, das als “Transponder” bekannt ist. Der Transponder ist ein Funkempfänger- und -senderpaar, das auf 1030 MHz empfängt und auf 1090 MHz sendet. Der Zielflugzeugtransponder antwortet auf Signale von einem Interrogator (normalerweise, aber nicht notwendigerweise einer Bodenstation, die sich zusammen mit einem Primärradar befindet), indem er ein codiertes Antwortsignal sendet, das die angeforderten Informationen enthält.[5]


Sowohl die zivile SSR als auch die militärische IFF sind viel komplexer geworden als ihre Vorfahren aus der Kriegszeit, bleiben jedoch miteinander kompatibel, nicht zuletzt, um Militärflugzeugen den Einsatz im zivilen Luftraum zu ermöglichen. Die heutige SSR kann viel detailliertere Informationen liefern, beispielsweise die Flughöhe, und den direkten Datenaustausch zwischen Flugzeugen zur Vermeidung von Kollisionen ermöglichen. Die meisten SSR-Systeme basieren auf Transpondern des Modus C, die die Druckhöhe des Flugzeugs angeben. Die Druckhöhe ist unabhängig von der Höhenmessereinstellung des Piloten.[6] Dies verhindert falsche Höhenübertragungen, wenn der Höhenmesser falsch eingestellt ist. Flugsicherungssysteme berechnen die gemeldeten Druckhöhen gegebenenfalls anhand ihrer eigenen Druckreferenzen auf die tatsächlichen Höhen.
Aufgrund seiner primären militärischen Rolle bei der zuverlässigen Identifizierung von Freunden verfügt die IFF über viel sicherere (verschlüsselte) Nachrichten, um “Spoofing” durch den Feind zu verhindern, und wird auf vielen Arten von militärischen Plattformen verwendet, einschließlich Luft-, See- und Landfahrzeugen.[citation needed]
Normen und Spezifikationen[edit]
Die Internationale Zivilluftfahrt-Organisation (ICAO) ist eine Zweigstelle der Vereinten Nationen und hat ihren Hauptsitz in Montreal, Quebec, Kanada. Es veröffentlicht Anhänge zum Übereinkommen und Anhang 10 befasst sich mit Standards und empfohlenen Praktiken für die Luftfahrt-Telekommunikation. Ziel ist es sicherzustellen, dass Flugzeuge, die internationale Grenzen überschreiten, in allen Ländern, die besucht werden dürfen, mit den Flugsicherungssystemen kompatibel sind. Band III, Teil 1 befasst sich mit digitalen Datenkommunikationssystemen einschließlich der Datenverbindungsfunktionen von Modus S, während Band IV seinen Betrieb und seine Signale im Raum definiert.[7]
Die American Radio Technical Commission für Luftfahrt (RTCA) und die Europäische Organisation für Zivilluftfahrtausrüstung (Eurocae) produzieren Mindeststandards für die Betriebsleistung Für Boden- und Luftfahrzeuge gemäß den in Anhang 10 der ICAO festgelegten Standards. Beide Organisationen arbeiten häufig zusammen und erstellen gemeinsame Dokumente.[citation needed]
ARINC (Aeronautical Radio, Incorporated) ist eine von Fluggesellschaften betriebene Organisation, die sich mit Form, Passform und Funktion von in Flugzeugen beförderter Ausrüstung befasst. Der Hauptzweck besteht darin, den Wettbewerb zwischen den Herstellern durch Angabe der Größe, des Strombedarfs, der Schnittstellen und der Leistung der in der Ausrüstungsbucht des Flugzeugs anzuordnenden Ausrüstung sicherzustellen.[citation needed]
Betrieb[edit]
Der Zweck von SSR besteht darin, die Fähigkeit zur Erkennung und Identifizierung von Flugzeugen zu verbessern und gleichzeitig automatisch die Flughöhe (Druckhöhe) eines Flugzeugs bereitzustellen. Eine SSR-Bodenstation sendet Abfrageimpulse auf 1030 MHz (kontinuierlich in den Modi A, C und selektiv im Modus S), wenn sich ihre Antenne im Raum dreht oder elektronisch abgetastet wird. Ein Flugzeugtransponder in Sichtweite “lauscht” auf das SSR-Abfragesignal und sendet eine Antwort auf 1090 MHz, die Flugzeuginformationen liefert. Die gesendete Antwort hängt vom Abfragemodus ab. Das Flugzeug wird als markiertes Symbol auf dem Radarbildschirm des Controllers in der gemessenen Peilung und Reichweite angezeigt. Ein Flugzeug ohne operierenden Transponder kann weiterhin vom Primärradar beobachtet werden, würde jedoch der Steuerung ohne den Vorteil von SSR-abgeleiteten Daten angezeigt. In der Regel ist ein funktionierender Transponder erforderlich, um im kontrollierten Luftraum fliegen zu können, und viele Flugzeuge verfügen über einen Ersatztransponder, um sicherzustellen, dass die Bedingung erfüllt ist.[8]
Abfragemodi[edit]
Es gibt verschiedene Abfragemodi, die jeweils durch den Unterschied im Abstand zwischen zwei Senderimpulsen angezeigt werden, die als P1 und P3 bekannt sind.[7] Jeder Modus erzeugt eine andere Reaktion des Flugzeugs. Ein dritter Impuls, P2, dient zur Unterdrückung von Nebenkeulen und wird später beschrieben. Nicht enthalten sind zusätzliche militärische (oder IFF) Modi, die unter Identifikation Freund oder Feind beschrieben sind.


| Modus | P1 – P3 Pulsabstand | Zweck |
|---|---|---|
| EIN | 8 µs | Identität |
| B. | 17 µs | Identität |
| C. | 21 µs | Höhe |
| D. | 25 µs | nicht definiert |
| S. | 3,5 µs | Mehrzweck |


Eine Modus-A-Abfrage löst eine 12-Puls-Antwort aus, die eine diesem Flugzeug zugeordnete Identitätsnummer angibt. Die 12 Datenimpulse werden durch zwei Rahmenimpulse F1 und F2 in Klammern gesetzt. Der X-Impuls wird nicht verwendet. Eine Modus-C-Abfrage erzeugt eine 11-Puls-Antwort (Puls D1 wird nicht verwendet), die die Flughöhe anzeigt, wie durch ihren Höhenmesser in Schritten von 100 Fuß angezeigt. Modus B gab eine ähnliche Reaktion wie Modus A und wurde einmal in Australien verwendet. Modus D wurde noch nie betriebsbereit verwendet.[citation needed]
Der neue Modus, Modus S, hat unterschiedliche Abfrageeigenschaften. Es umfasst die Impulse P1 und P2 vom Antennenhauptstrahl, um sicherzustellen, dass die Transponder Mode-A und Mode-C nicht antworten, gefolgt von einem langen phasenmodulierten Impuls.[7]
Die Bodenantenne ist stark gerichtet, kann jedoch nicht ohne Nebenkeulen konstruiert werden. Flugzeuge könnten auch Befragungen von diesen Nebenkeulen erkennen und angemessen antworten. Diese Antworten können jedoch nicht von den beabsichtigten Antworten des Hauptstrahls unterschieden werden und können zu einer falschen Flugzeuganzeige bei einer fehlerhaften Peilung führen. Um dieses Problem zu lösen, ist die Bodenantenne mit einem zweiten, hauptsächlich omnidirektionalen Strahl versehen, dessen Verstärkung die der Nebenkeulen, aber nicht die des Hauptstrahls übersteigt. Ein dritter Impuls P2 wird von diesem zweiten Strahl 2 us nach P1 übertragen. Ein Flugzeug, das P2 stärker als P1 erkennt (daher in der Nebenkeule und am falschen Hauptkeulenlager), antwortet nicht.[7]
Mängel[edit]
Eine Reihe von Problemen sind in einer ICAO-Veröffentlichung von 1983 mit dem Titel beschrieben Rundschreiben für den Sekundärüberwachungsradarmodus S..[9]
Modus A.[edit]


Obwohl 4.096 verschiedene Identitätscodes in einem Modus verfügbar sind, scheint eine Antwort ausreichend zu sein, sobald bestimmte Codes für Notfälle und andere Zwecke reserviert wurden, wird die Anzahl erheblich reduziert. Im Idealfall behält ein Flugzeug den gleichen Code vom Start bis zur Landung bei, auch wenn es internationale Grenzen überschreitet, da er in der Flugsicherungszentrale verwendet wird, um das Rufzeichen des Flugzeugs mithilfe eines als Code / Rufzeichen-Konvertierung bezeichneten Prozesses anzuzeigen. Offensichtlich der gleiche Modus Ein Code sollte nicht zwei Flugzeugen gleichzeitig gegeben werden, da der Fluglotse am Boden möglicherweise das falsche Rufzeichen für die Kommunikation mit dem Flugzeug erhalten könnte.[7]
Modus C.[edit]
Die Antwort im Modus C liefert Höheninkremente von 100 Fuß, was ursprünglich für die Überwachung von Flugzeugen mit einem Abstand von mindestens 1000 Fuß ausreichend war. Mit zunehmender Überlastung des Luftraums wurde es jedoch wichtig zu überwachen, ob sich Flugzeuge nicht von ihrem zugewiesenen Flugniveau entfernen. Eine geringfügige Änderung von einigen Fuß könnte eine Schwelle überschreiten und als das nächste Inkrement und eine Änderung von 100 Fuß angezeigt werden. Kleinere Inkremente waren wünschenswert.[citation needed]
OBST[edit]
Da alle Flugzeuge auf derselben Frequenz von 1090 MHz antworten, erhält eine Bodenstation auch Flugzeugantworten, die aus Antworten auf andere Bodenstationen stammen. Diese unerwünschten Antworten werden als FRUIT bezeichnet (falsche Antworten, die nicht mit Interrogator-Übertragungen synchronisiert sind, oder alternativ falsche Antworten, die zeitlich nicht synchronisiert sind). Mehrere aufeinanderfolgende FRUIT-Antworten könnten kombiniert werden und auf ein Flugzeug hinweisen, das nicht existiert. Wenn sich der Luftverkehr ausdehnt und mehr Flugzeuge den Luftraum besetzen, wird auch die Menge der erzeugten FRÜCHTE zunehmen.[9]
Verstümmeln[edit]
FRUIT-Antworten können sich mit gewünschten Antworten an einem Bodenempfänger überschneiden, wodurch Fehler beim Extrahieren der enthaltenen Daten verursacht werden. Eine Lösung besteht darin, die Abfragerate zu erhöhen, um mehr Antworten zu erhalten, in der Hoffnung, dass einige störungsfrei sind. Der Prozess ist selbstzerstörerisch, da eine Erhöhung der Antwortrate nur die Interferenz für andere Benutzer erhöht und umgekehrt.[9]
Synchrones Gewirr[edit]
Wenn sich zwei Flugzeugpfade innerhalb eines Neigungsbereichs von etwa zwei Meilen vom Bodenabfrager kreuzen, überlappen sich ihre Antworten und die verursachten Störungen erschweren ihre Erkennung. In der Regel verliert der Controller das Flugzeug mit größerer Reichweite, genau dann, wenn der Controller am meisten daran interessiert ist, sie genau zu überwachen.[9]
Erfassung[edit]
Während ein Flugzeug auf eine Bodenabfrage antwortet, kann es nicht auf eine andere Abfrage reagieren, wodurch die Erkennungseffizienz verringert wird. Bei einer Abfrage im Modus A oder C kann die Transponderantwort bis zu 120 µs dauern, bevor sie auf eine weitere Abfrage antworten kann.[9]
Antenne[edit]



Die Bodenantenne hat eine typische horizontale 3-dB-Strahlbreite von 2,5 °, was die Genauigkeit bei der Bestimmung der Peilung des Flugzeugs einschränkt. Die Genauigkeit kann verbessert werden, indem viele Abfragen durchgeführt werden, während der Antennenstrahl ein Flugzeug abtastet, und eine bessere Schätzung kann erhalten werden, indem notiert wird, wo die Antworten begonnen und wo sie gestoppt wurden, und die Mitte der Antworten als Richtung des Flugzeugs genommen wird. Dies ist als Schiebefensterprozess bekannt.[1]
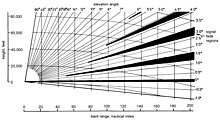
Das frühe System verwendete eine Antenne, die als a bekannt ist Hogtrough. Dies hat eine große horizontale Abmessung, um einen schmalen horizontalen Strahl zu erzeugen, und eine kleine vertikale Abmessung, um eine Abdeckung von nahe am Horizont bis fast über Kopf bereitzustellen. Es gab zwei Probleme mit dieser Antenne. Erstens ist fast die Hälfte der Energie auf den Boden gerichtet, wo sie wieder nach oben reflektiert wird und die nach oben gerichtete Energie stört, was bei bestimmten Höhenwinkeln tiefe Nullen und einen Kontaktverlust mit dem Flugzeug verursacht. Zweitens, wenn der umgebende Boden abfällt, wird die reflektierte Energie teilweise horizontal versetzt, wodurch die Strahlform und die angezeigte Peilung des Flugzeugs verzerrt werden. Dies war besonders wichtig in einem Monopuls-System mit seiner stark verbesserten Lagermessgenauigkeit.[10]
Entwicklungen zur Behebung der Mängel[edit]
Die Mängel in den Modi A und C wurden ziemlich früh bei der Verwendung von SSR erkannt und 1967 veröffentlichte Ullyatt ein Papier[11] und 1969 ein erweitertes Papier,[12] die Verbesserungen der SSR vorschlug, um die Probleme anzugehen. Das Wesentliche der Vorschläge waren neue Befragungs- und Antwortformate. Flugzeugidentität und Flughöhe sollten in die eine Antwort aufgenommen werden, damit eine Zusammenstellung der beiden Datenelemente nicht erforderlich wäre. Zum Schutz vor Fehlern wurde ein einfaches Paritätssystem vorgeschlagen – siehe Sekundäres Überwachungsradar – heute und morgen.[13] Monopuls würde verwendet, um die Peilung des Flugzeugs zu bestimmen, wodurch die Anzahl der Abfragen / Antworten pro Flugzeug bei jedem Scan der Antenne auf eins reduziert wird. Ferner würden jeder Abfrage Hauptstrahlimpulse P1 und P2 vorausgehen, die durch 2 us getrennt sind, so dass Transponder, die in den Modi A und C arbeiten, davon ausgehen würden, dass sie von der Nebenkeule der Antenne kommen und nicht antworten und keine unnötige FRUCHT verursachen.[12]
Die FAA erwog ebenfalls ähnliche Probleme, ging jedoch davon aus, dass ein neues Frequenzpaar erforderlich sein würde. Ullyatt zeigte, dass die vorhandenen Frequenzen von 1030 MHz und 1090 MHz beibehalten werden konnten und die vorhandenen Bodenabfrager und Airbornes-Transponder mit geeigneten Modifikationen verwendet werden konnten. Das Ergebnis war ein Memorandum of Understanding zwischen den USA und Großbritannien zur Entwicklung eines gemeinsamen Systems. In den USA hieß das Programm DABS (Discrete Address Beacon System) und in Großbritannien Adsel (Address Selective).[14]
Monopuls, dh Einzelpuls, wurde in militärischen Track-and-Follow-Systemen verwendet, bei denen die Antenne so gesteuert wurde, dass sie einem bestimmten Ziel folgte, indem das Ziel in der Mitte des Strahls gehalten wurde. Ullyatt schlug die Verwendung eines kontinuierlich rotierenden Trägers mit Peilungsmessung vor, die überall dort durchgeführt wird, wo der Impuls im Träger ankommen kann.[15]
Die FAA beauftragte das Lincoln Laboratory des MIT mit der Weiterentwicklung des Systems und erstellte eine Reihe von ATC-Berichten, in denen alle Aspekte der neuen gemeinsamen Entwicklung definiert wurden.[16] Bemerkenswerte Ergänzungen zu dem von Ullyatt vorgeschlagenen Konzept waren die Verwendung eines leistungsstärkeren 24-Bit-Paritätssystems unter Verwendung eines zyklischen Redundanzcodes, das nicht nur die Genauigkeit der empfangenen Daten ohne Wiederholung sicherstellte, sondern auch Fehler zuließ, die durch eine überlappende FRUCHT verursacht wurden Antwort korrigiert werden. Ferner umfasste der vorgeschlagene Flugzeugidentitätscode auch 24 Bit mit 16 Millionen Permutationen. Dadurch konnte jedes Flugzeug mit einer eigenen eindeutigen Adresse verkabelt werden. Adressblöcke werden verschiedenen Ländern zugeordnet[17] und ferner bestimmten Fluggesellschaften zugewiesen, so dass die Kenntnis der Adresse ein bestimmtes Flugzeug identifizieren kann. Der Lincoln Laboratory Report ATC 42 mit dem Titel Modus S Beacon System: Funktionsbeschreibung gab Details zu dem vorgeschlagenen neuen System.[18]
Die beiden Länder berichteten über die Ergebnisse ihrer Entwicklung in einem gemeinsamen Papier. ADSEL / DABS – Ein Sekundärüberwachungsradar für selektive Adressen.[14] Es folgte eine Konferenz im ICAO-Hauptquartier in Montreal, auf der eine vom Lincoln Laboratory erstellte Abfrage mit geringem Stromverbrauch erfolgreich mit einem verbesserten kommerziellen SSR-Transponder der britischen Fertigung kommunizierte.[citation needed]


Das einzige, was benötigt wurde, war ein internationaler Name. Es wurde viel von den vorgeschlagenen neuen Merkmalen gemacht, aber die vorhandenen SSR-Bodenabfrager würden weiterhin verwendet, wenn auch mit Modifikation, und die vorhandenen luftgebundenen Transponder, wiederum mit Modifikation. Der beste Weg zu zeigen, dass dies eine Evolution und keine Revolution war, bestand darin, sie immer noch SSR zu nennen, aber mit einem neuen Modusbuchstaben. Modus S war die offensichtliche Wahl, wobei S für Auswahl stand. 1983 gab die ICAO ein Beratungsrundschreiben heraus, in dem das neue System beschrieben wurde.[9]
Verbesserte Antenne[edit]
Das Problem mit der vorhandenen Standard-Hogtrough-Antenne wurde durch die in Richtung Boden abgestrahlte Energie verursacht, die reflektiert wurde und die nach oben gerichtete Energie störte. Die Antwort war, den vertikalen Strahl zu formen. Dies erforderte eine vertikale Anordnung von Dipolen, die geeignet zugeführt wurden, um die gewünschte Form zu erzeugen. Eine vertikale Abmessung von fünf Fuß wurde als optimal befunden, und dies ist zum internationalen Standard geworden.[10]
Monopuls-Sekundärüberwachungsradar[edit]


Das neue Mode S-System sollte mit nur einer Antwort eines Flugzeugs betrieben werden, einem System, das als Monopuls bekannt ist. Das beigefügte Diagramm zeigt einen herkömmlichen Haupt- oder “Summen” -Strahl einer SSR-Antenne, zu der ein “Differenz” -Strahl hinzugefügt wurde. Zur Erzeugung des Summenstrahls wird das Signal horizontal über die Antennenapertur verteilt. Dieses Zuführsystem wird in zwei gleiche Hälften geteilt und die beiden Teile erneut summiert, um den ursprünglichen Summenstrahl zu erzeugen. Die zwei Hälften werden jedoch auch subtrahiert, um eine Differenzausgabe zu erzeugen. Ein Signal, das genau normal oder mittig zur Antenne ankommt, erzeugt eine maximale Ausgabe im Summenstrahl, aber ein Nullsignal im Differenzstrahl. Außerhalb der Mittelachse ist das Signal im Summenstrahl geringer, aber im Differenzstrahl ist ein Signal ungleich Null vorhanden. Der Ankunftswinkel des Signals kann durch Messen des Verhältnisses der Signale zwischen dem Summen- und dem Differenzstrahl bestimmt werden. Die Mehrdeutigkeit bezüglich der Mittelachse kann behoben werden, da das Differenzsignal auf beiden Seiten der Mittelachse eine Phasenänderung von 180 ° aufweist. Peilungsmessungen können an einem einzelnen Impuls durchgeführt werden, daher ein Monopuls. Die Genauigkeit kann jedoch verbessert werden, indem Messungen gemittelt werden, die an mehreren oder allen Impulsen durchgeführt wurden, die in einer Antwort von einem Flugzeug empfangen wurden. Ein Monopulsempfänger[15] wurde früh im britischen Adsel-Programm entwickelt und dieses Design ist bis heute weit verbreitet. Die Antwortimpulse des Modus S sind absichtlich so ausgelegt, dass sie den Antworten des Modus A und C ähnlich sind, so dass derselbe Empfänger verwendet werden kann, um eine verbesserte Peilungsmessung für das SSR-System des Modus A und C bereitzustellen, mit dem Vorteil, dass die Abfragerate wesentlich verringert werden kann, wodurch die verringert wird Störungen, die anderen Benutzern des Systems entstehen.[19]
Das Lincoln Laboratory nutzte die Verfügbarkeit einer separaten Peilungsmessung für jeden Antwortimpuls, um einige der Probleme der Verwirrung zu überwinden, bei denen sich zwei Antworten überlappen, wodurch die Impulse den beiden Antworten zugeordnet werden. Da jeder Impuls separat mit der Richtung gekennzeichnet ist, können diese Informationen verwendet werden, um zwei überlappende Antworten des Modus A oder C zu entschlüsseln. Der Prozess wird in ATC-65 “Der ATCRBS-Modus von DABS” vorgestellt.[20] Der Ansatz kann weiter verfolgt werden, indem auch die Stärke jedes Antwortimpulses gemessen und auch als Unterscheidung verwendet wird.[1] Die folgende Tabelle vergleicht die Leistung von herkömmlichem SSR, Monopuls-SSR (MSSR) und Modus S.[19]
| Standard SSR | Monopulse SSR | Modus S. | |
|---|---|---|---|
| Antworten pro Scan | 20–30 | 4–8 | 1 |
| Entfernungsgenauigkeit | 230 m rms | 13 m rms | 7 m rms |
| Lagergenauigkeit | 0,08 ° rms | 0,04 ° rms | 0,04 ° rms |
| Höhenauflösung | 30 m | 100 ft | 7,6 m |
| Garble Resistenz | Arm | gut | Beste |
| Datenkapazität (Uplink) | 0 | 0 | 56–1.280 Bit |
| Datenkapazität (Downlink) | 23 Bit | 23 Bit | 56–1.280 Bit |
| Identitätspermutationen | 4,096 | 4,096 | 16 Millionen |
Das MSSR ersetzte die meisten bestehenden SSRs in den 1990er Jahren und seine Genauigkeit sah eine Reduzierung der Trennungsminima im ATC auf der Strecke von 10 Seemeilen (19 km) auf 5 Seemeilen (9,3 km) vor.[21]
MSSR löste viele der Systemprobleme von SSR, da nur Änderungen am Bodensystem erforderlich waren. Die in Flugzeugen installierten Transponder waren nicht betroffen. Dies führte zweifellos zu einer Verzögerung von Mode S.[16]



Eine detailliertere Beschreibung von Mode S finden Sie in der Eurocontrol-Veröffentlichung Prinzipien von Mode S und Interrogator Codes[8] und das ICAO-Rundschreiben 174-AN / 110 Rundschreiben für den Sekundärüberwachungsradarmodus S..[9] Die 16 Millionen Permutationen der 24-Bit-Flugzeugadresscodes wurden in Blöcken einzelnen Staaten zugewiesen, und die Zuordnung ist in Anhang 10 der ICAO, Band III, Kapitel 9 angegeben.[17]
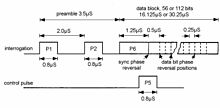
Eine Modus-S-Abfrage umfasst zwei 0,8 us breite Impulse.[18] die von einem Modus-A & C-Transponder als von einer Antennennebenkeule stammend interpretiert werden und daher keine Antwort erforderlich ist. Der folgende lange P6-Impuls wird mit der ersten Phasenumkehr nach 1,25 us phasenmoduliert, wodurch der Phasendetektor des Transponders synchronisiert wird. Nachfolgende Phasenumkehrungen zeigen ein Datenbit von 1 an, wobei keine Phasenumkehrung ein Bit von Wert 0 anzeigt. Diese Form der Modulation bietet einen gewissen Widerstand gegen Verfälschung durch einen zufälligen überlappenden Impuls von einem anderen Erdungsabfrager. Die Abfrage kann kurz mit P6 = 16,125 us sein, hauptsächlich verwendet, um eine Positionsaktualisierung zu erhalten, oder lang, P6 = 30,25 us, wenn zusätzliche 56 Datenbits enthalten sind. Die letzten 24 Bits enthalten sowohl die Parität als auch die Adresse des Flugzeugs. Bei Empfang einer Abfrage dekodiert ein Flugzeug die Daten und berechnet die Parität. Wenn der Rest nicht die Adresse des Flugzeugs ist, war entweder die Abfrage nicht für das Flugzeug bestimmt oder es wurde beschädigt. In beiden Fällen wird nicht geantwortet. Wenn die Bodenstation eine Antwort erwartet und keine erhalten hat, wird sie erneut abgefragt.[9]
Das Flugzeug antwortet[18] besteht aus einer Präambel von vier Impulsen, die so beabstandet sind, dass sie nicht fälschlicherweise aus überlappenden Antworten des Modus A oder C gebildet werden können. Die verbleibenden Impulse enthalten Daten unter Verwendung der Impulspositionsamplitudenmodulation. Jedes 1-µs-Intervall ist in zwei Teile unterteilt. Wenn ein 0,5-µs-Impuls die erste Hälfte belegt und in der zweiten Hälfte kein Impuls vorhanden ist, wird eine binäre 1 angezeigt. Wenn es umgekehrt ist, stellt es eine binäre 0 dar. Tatsächlich werden die Daten zweimal übertragen, das zweite Mal in umgekehrter Form. Dieses Format ist aufgrund einer verstümmelten Antwort eines anderen Flugzeugs sehr fehlerresistent. Um einen harten Fehler zu verursachen, muss ein Impuls gelöscht und ein zweiter Impuls in die andere Hälfte der Bitperiode eingefügt werden. Viel wahrscheinlicher ist, dass beide Hälften verwirrt sind und das decodierte Bit als “geringes Vertrauen” gekennzeichnet ist.[20]
Die Antwort hat auch Parität und Adresse in den letzten 24 Bits. Die Bodenstation verfolgt das Flugzeug und verwendet die vorhergesagte Position, um die Reichweite und Peilung des Flugzeugs anzuzeigen, damit es erneut abfragen und eine Aktualisierung seiner Position erhalten kann. Wenn es eine Antwort erwartet und eine erhält, vergleicht es den Rest der Paritätsprüfung mit der Adresse des erwarteten Flugzeugs. Wenn es nicht dasselbe ist, ist es entweder das falsche Flugzeug und eine erneute Befragung ist erforderlich, oder die Antwort wurde durch eine Störung beschädigt, indem sie durch eine andere Antwort verstümmelt wurde. Das Paritätssystem kann Fehler korrigieren, solange sie 24 µs nicht überschreiten. Dies umfasst die Dauer einer Antwort im Modus A oder C, der am meisten erwarteten Störquelle in den frühen Tagen des Modus S. Die Impulse in der Antwort Es stehen individuelle Monopulswinkelmessungen zur Verfügung und in einigen Implementierungen auch Signalstärkemessungen, die Bits anzeigen können, die mit der Mehrzahl der anderen Bits nicht übereinstimmen, wodurch auf eine mögliche Beschädigung hingewiesen wird. Ein Test wird durchgeführt, indem der Status einiger oder aller dieser Bits invertiert wird (eine 0 wird in eine 1 geändert oder umgekehrt). Wenn die Paritätsprüfung nun erfolgreich ist, werden die Änderungen dauerhaft vorgenommen und die Antwort akzeptiert. Wenn dies fehlschlägt, ist eine erneute Abfrage erforderlich.[9]
Modus S arbeitet nach dem Prinzip, dass Abfragen unter Verwendung der eindeutigen Adresse dieses Flugzeugs an ein bestimmtes Flugzeug gerichtet werden. Dies führt zu einer einzelnen Antwort mit einer Flugzeugreichweite, die durch die Zeit bestimmt wird, die zum Empfang der Antwort benötigt wird, und zu einem Monopuls, der eine genaue Peilungsmessung liefert. Um ein Flugzeug abzufragen, muss seine Adresse bekannt sein. Um diese Anforderung zu erfüllen, sendet der Bodenabfrager auch All-Call-Abfragen, die in zwei Formen vorliegen.[9]


In einer Form sieht der Modus-A / C / S-All-Call zunächst wie eine herkömmliche Modus-A- oder C-Abfrage aus, und ein Transponder startet den Antwortprozess beim Empfang des Impulses P3. Ein Mode S-Transponder bricht diesen Vorgang jedoch bei Erkennung des Impulses P4 ab und antwortet stattdessen mit einer kurzen Mode S-Antwort, die seine 24-Bit-Adresse enthält. Diese Form der All-Call-Abfrage wird derzeit nicht mehr häufig verwendet, da sie weiterhin Antworten von bereits bekannten Flugzeugen erhält und zu unnötigen Störungen führt. Die alternative Form von All-Call verwendet eine kurze Modus-S-Abfrage mit einem Datenblock von 16,125 µs. Dies kann einen Hinweis darauf enthalten, dass der Interrogator den All-Call mit der Anforderung sendet, dass, wenn das Flugzeug bereits auf diesen Interrogator geantwortet hat, nicht erneut geantwortet wird, da das Flugzeug bereits bekannt ist und eine Antwort nicht erforderlich ist.[9]
Die Abfrage von Modus S kann drei Formen annehmen:
| Name | bilden | verwenden |
|---|---|---|
| Überwachung | kurz | Positionsaktualisierung |
| Komma | lange | enthält 56 Datenbits |
| Comm-C | lange | Bis zu 16 lange Abfragen wurden aneinander gereiht, um bis zu 1280 Bit zu übertragen |
Die ersten fünf Bits, die als Uplink-Feld (UF) im Datenblock bekannt sind, geben die Art der Abfrage an. Die letzten 24 Bits sind jeweils kombinierte Flugzeugadresse und Parität. Es wurden noch nicht alle Permutationen zugewiesen, aber die folgenden werden angezeigt:[9]
| UF binär | UF-Dezimalzahl | Anwendung |
|---|---|---|
| 00000 | 0 | kurze Luft-Luft-Überwachung (TCAS) |
| 00100 | 4 | Überwachung, Höhenanfrage |
| 00101 | 5 | Überwachung, Modus Eine Identitätsanfrage |
| 01011 | 11 | Nur Modus S All-Call |
| 10000 | 16 | lange Luft-Luft-Überwachung (TCAS) |
| 10100 | 20 | Comm-A inklusive Höhenanfrage |
| 10101 | 21 | Comm-A einschließlich Modus A Identitätsanforderung |
| 11000 | 24 | Comm-C (Nachricht mit erweiterter Länge) |
In ähnlicher Weise kann die Antwort von Modus S drei Formen annehmen:[9]
| Name | bilden | verwenden |
|---|---|---|
| Überwachung | kurz | Positionsaktualisierung |
| Comm-B | lange | enthält 56 Datenbits |
| Comm-D | lange | Bis zu 16 lange Abfragen wurden aneinander gereiht, um bis zu 1280 Bit zu übertragen |
Die ersten fünf Bits, bekannt als Downlink-Feld (DF) im Datenblock, geben die Art der Antwort an. Die letzten 24 Bits sind jeweils kombinierte Flugzeugadresse und Parität. Elf Permutationen wurden zugewiesen.[9]
| DF binär | DF dezimal | Anwendung |
|---|---|---|
| 00000 | 0 | kurze Luft-Luft-Überwachung (TCAS) |
| 00100 | 4 | Überwachung, Höhenantwort |
| 00101 | 5 | Überwachung, Modus Eine Identitätsantwort |
| 01011 | 11 | All-Call-Antwort mit Flugzeugadresse |
| 10000 | 16 | lange Luft-Luft-Überwachung (TCAS) |
| 10001 | 17 | verlängerter Squitter |
| 10010 | 18 | TIS-B |
| 10011 | 19 | militärischer erweiterter Squitter |
| 10100 | 20 | Comm-B-Antwort einschließlich Höhe |
| 10101 | 21 | Comm-B-Antwort einschließlich der Identität von Modus A. |
| 10110 | 22 | militärische Verwendung |
| 11000 | 24 | Bis zu 16 lange Antworten reihen sich aneinander, um bis zu 1280 Bit zu übertragen |
Ein Transponder, der zum Senden von Comm-B-Antworten ausgestattet ist, ist mit 256 Datenregistern mit jeweils 56 Bits ausgestattet. Der Inhalt dieser Register wird aus integrierten Datenquellen gefüllt und verwaltet. Wenn das Bodensystem diese Daten benötigt, fordert es sie durch eine Überwachungs- oder Kommunikationsabfrage an.[9]
ICAO Anhang 10 Band III, Kapitel 5 listet den Inhalt aller derzeit zugewiesenen auf. Für den aktuellen Betrieb ist eine reduzierte Anzahl erforderlich.[22][23] Andere Register sind zur Verwendung mit TCAS und ADS-B vorgesehen. Die BDS-Nummern (Comm-B Data Selector) sind hexadezimal geschrieben.
| registrieren | Daten |
|---|---|
| BDS 6,0 | magnetische Überschrift |
| BDS 6,0 | Angezeigte Fluggeschwindigkeit |
| BDS 6,0 | Machzahl |
| BDS 6,0 | vertikale Rate |
| BDS 5,0 | Rollwinkel |
| BDS 5,0 | Spurwinkelrate |
| BDS 5,0 | wahrer Spurwinkel |
| BDS 5,0 | Fahrgeschwindigkeit |
| BDS 4,0 | ausgewählte vertikale Absicht |
Erweiterter Squitter[edit]
Ab 2009 definierte die ICAO einen “Extended Squitter” -Betriebsmodus.[24] Es ergänzt die Anforderungen in Anhang 10 der ICAO, Bände III und IV. In der ersten Ausgabe wurden frühere Versionen erweiterter Squitter-Nachrichten angegeben:
- Version 0
- Erweitert den Modus S, um grundlegende ADS-B-Austausche zu verarbeiten, Informationen im TIS-B-Format (Traffic Information Broadcast) sowie Informationen zum Uplink- und Downlink-Broadcast-Protokoll hinzuzufügen.
- Version 1
- Beschreibt Informationen zur Überwachungsgenauigkeit und -integrität (Navigationsgenauigkeitskategorie, Navigationsintegritätskategorie, Überwachungsintegritätsstufe) sowie zusätzliche Parameter für die erneute Übertragung von TIS-B und ADS-B (ADS-R) besser.
- Version 2
- Mit der zweiten Ausgabe wurde eine neue Version erweiterter Squitter-Formate und -Protokolle eingeführt, um:[25]
- Verbesserung der Integrität und Genauigkeit der Berichterstattung
- Hinzufügen einer Reihe zusätzlicher Parameter zur Unterstützung der ermittelten betrieblichen Anforderungen für die Verwendung von ADS-B, die nicht in Version 1 abgedeckt sind (einschließlich Funktionen zur Unterstützung von Flughafenoberflächenanwendungen)
- Ändern Sie mehrere Parameter und entfernen Sie eine Reihe von Parametern, die für die Unterstützung von ADS-B-Anwendungen nicht mehr erforderlich sind
Siehe auch[edit]
Verweise[edit]
- ^ ein b c Sekundäres Überwachungsradar, Stevens MC Artech House, ISBN 0-89006-292-7
- ^ “Überwachungssysteme für Flugverkehrsdienste, einschließlich einer Erläuterung des Primär- und Sekundärradars”. www.airwaysmuseum.com. Abgerufen 20.06.2009.
- ^ “AIR TRAFFIC CONTROL RADAR”. Argos Press. Archiviert von das Original am 18.09.2009. Abgerufen 20.06.2009.
- ^ “Sekundäres Überwachungsradar in Flugverkehrskontrollsystemen: Eine Beschreibung der Vorteile und Auswirkungen der Einführung von SSR-Einrichtungen für den Controller”. Flugzeugtechnik und Luft- und Raumfahrttechnik. Abgerufen 20.06.2009.
- ^ Illman, Paul E. (1998). Das Funkkommunikationshandbuch des Piloten (5. Auflage, Taschenbuch). McGraw-Hill. p. 111. ISBN 0-07-031832-8.
- ^ Instrumentenflughandbuch. US-Verkehrsministerium, FAA. 2008. pp. 3–7.
- ^ ein b c d e ICAO-Anhang 10, Band IV
- ^ ein b Prinzipien des Modus S-Betriebs und Abfragecodes
- ^ ein b c d e f G h ich j k l m n Ö ICAO-Rundschreiben 174-AN / 110 Rundschreiben für den Sekundärüberwachungsradarmodus S.
- ^ ein b Stevens, MC “Multipath- und Interferenzeffekte in sekundären Überwachungsradarsystemen”, Proc. Inst.Electr. Eng., Part F, 128 (1), 43–53, 1981
- ^ Ullyatt, C. Sekundärradar im Zeitalter der automatischen Verfolgung, IEE Comf. Pub., 28, 140, 1967
- ^ ein b Ullyatt, C. Sensoren für die ATC-Umgebung unter besonderer Berücksichtigung von SSR, Electron. Civil Aviat., 3, C1 – C3, 1969
- ^ Stevens, MC, Sekundäres Überwachungsradar – heute und morgen, SERT Avionics Symposium, Swansea, Juli 1974.
- ^ ein b Bowes RC, Drouilhet PR, Weiss HG und Stevens MC, ADSEL / DABS – Ein Sekundärüberwachungsradar für selektive Adressen, AGARD Conference Proceedings No. 188. 20. Symposium des Guidance and Control Panel vom 20. bis 23. Mai 1975 in Cambridge, Massachusetts, USA
- ^ ein b Stevens, MC Präzisions-SekundärradarProc. Inst. Electr. Eng., 118 (12), 1729–1735, 1971
- ^ ein b Die Geschichte von Modus S: Eine Datenverbindungstechnologie für die Flugsicherung: Mode S Heute, Chang E., Hu R., Lai D., Li R., Scott Q., Tyan T., Dezember 2000
- ^ ein b “ICAO Anhang 10 Band III: Kapitel 9. Flugzeugadressierungssystem” (PDF). ICAO-Anhang 10. ICAO. Archiviert von das Original (PDF) am 22.11.2008. Abgerufen 2017-06-02.
- ^ ein b c Orlando VA, Drouilhet PR (August 1986). “ATC-42 Mode S Beacon System: Funktionsbeschreibung (Rev. D)” (PDF). Lincoln Laboratory. Abgerufen 29. März, 2014.CS1-Wartung: Verwendet den Autorenparameter (Link)
- ^ ein b Stevens, MC S.Überwachung in der Mode S-Ära, CAA / IEE-Symposium zu ATC, London. März 1990
- ^ ein b Gertz JL (Januar 1977). “ATC-65 Der ATCRBS-Modus von DABS” (PDF). Lincoln Laboratory (MIT). Abgerufen 29. März, 2014.
- ^ FAA (2004). Investitionsplan für das Luftfahrtsystem. DIANE Verlag. ISBN 978-0-7881-3348-0.
- ^ Handbuch zu Modus S-spezifischen Diensten, Panel-Arbeitsgruppe B. Überwachungs- und KonfliktlösungssystemeSeptember 2001
- ^ Beförderung von SSR Mode S-Transpondern für IFR-Flüge, die als allgemeiner Verkehr betrieben werden, www.caa.co.uk/docs/810/
- ^ ICAO (2008). ICAO Doc 9871, Technische Bestimmungen für Mode S und Extended Squitter (1. Aufl.). Internationale Zivilluftfahrt-Organisation. ISBN 978-92-9231-117-9.
- ^ ICAO (2012). ICAO Doc 9871, Technische Bestimmungen für Mode S und Extended Squitter (2. Aufl.). Internationale Zivilluftfahrt-Organisation. ISBN 978-92-9249-042-3.
Weiterführende Literatur[edit]
- Branchenspezifikationen
Externe Links[edit]
Recent Comments