Apollo PGNCS – Wikipedia
Führungssystem für Apollo-Raumschiffe





Der Apollo primäres Leit-, Navigations- und Kontrollsystem (PGNCS) (ausgesprochen pings) war ein in sich geschlossenes Trägheitsleitsystem, das es Apollo-Raumfahrzeugen ermöglichte, ihre Missionen durchzuführen, wenn die Kommunikation mit der Erde entweder wie erwartet unterbrochen wurde, wenn sich die Raumsonde hinter dem Mond befand, oder im Falle eines Kommunikationsausfalls. Das Apollo-Kommandomodul (CM) und die Mondlandefähre (LM) waren jeweils mit einer Version von PGNCS ausgestattet. PGNCS und insbesondere sein Computer waren auch die Kommandozentrale für alle Systemeingaben des LM, einschließlich des optischen Ausrichtungsteleskops, des Radarsystems, der manuellen Translations- und Rotationsgeräteeingaben durch die Astronauten sowie anderer Eingaben von den LM-Systemen.
PGNCS wurde vom MIT Instrumentation Laboratory unter der Leitung von Charles Stark Draper entwickelt (das Instrumentation Laboratory wurde später nach ihm benannt). Hauptauftragnehmer für PGNCS und Hersteller der Trägheitsmesseinheit (IMU) war die Delco Division von General Motors. PGNCS bestand aus den folgenden Komponenten:
- eine Trägheitsmesseinheit (IMU)
- der Apollo Guidance Computer (AGC)
- Resolver zur Umwandlung von Trägheitsplattformwinkeln in Signale, die für die Servosteuerung verwendbar sind
- optische Einheiten, eine für die CM und eine andere für die LM
- ein mechanischer Rahmen, der als Navigationsbasis (oder Navbase) bezeichnet wird, um die optischen Geräte und im LM das Rendezvous-Radar mit der IMU fest zu verbinden
- die AGC-Software
Versionen[edit]



Der CM und der LM verwendeten denselben Computer, dieselbe Trägheitsplattform und dieselben Resolver. Der Hauptunterschied war die optische Einheit. Auch die Navigationsbasis war für jedes Raumfahrzeug unterschiedlich, was die unterschiedlichen Montagegeometrien widerspiegelte. Das Rendezvous-Radar des LM war auch mit seiner Navigationsbasis verbunden.
Es gab zwei Versionen von PGNCS – Block I und Block II – entsprechend den beiden Generationen des CM. Nach dem Apollo I-Feuer, das in einem Block I CM stattfand, entschied die NASA, dass keine weiteren bemannten Missionen Block I verwenden würden, obwohl dies bei unbemannten Missionen der Fall war. Zu den Hauptunterschieden zwischen Block I und Block II PGNCS gehörten der Austausch elektromechanischer Resolver durch ein vollelektronisches Design und der Austausch der aus Beryllium gefertigten Navbase Block I durch einen Rahmen aus Aluminiumrohren, die mit Polyurethanschaum gefüllt sind. Die Navbases von Block II waren leichter, billiger und genauso steif.
Ein weiterer wesentlicher Unterschied zwischen Block I und Block II war die Reparierbarkeit. Ein ursprüngliches Ziel des Apollo-Programms war es, dass die Astronauten Reparaturen an der Elektronik durchführen können. Dementsprechend wurde der Block 1 PNGCS mit vielen identischen Modulen konstruiert, die bei Bedarf im Flug durch Ersatzteile ersetzt werden konnten. Die hohe Luftfeuchtigkeit in den Besatzungsräumen und Unfälle beim Umgang mit Körperflüssigkeiten während der Gemini 7-Mission machten jedoch nicht abgedichtete elektrische Verbindungen unerwünscht. Das Ziel der Reparierbarkeit wurde in Block II beseitigt und alle Einheiten und elektrischen Verbindungen wurden abgedichtet.[1] Das tödliche Feuer von Apollo 1 verstärkte diese Besorgnis.
Komponenten von PGNCS wurden von Draper für das Deep Submergence Rescue Vehicle (DSRV) der US Navy verwendet.[2]
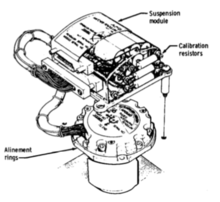
Trägheitsmesseinheit[edit]


Die IMU wurde auf drei Achsen kardanisch aufgehängt. Der innerste Teil, das stabile Element (SM), war ein 6-Zoll-Berylliumwürfel, in dem drei Gyroskope und drei Beschleunigungsmesser montiert waren. Rückkopplungsschleifen verwendeten Signale von den Gyroskopen über die Resolver, um Motoren an jeder Achse zu steuern. Dieses Servosystem hielt das stabile Element bezüglich des Trägheitsraums fest. Signale von den Beschleunigungsmessern wurden dann integriert, um die Geschwindigkeit und Position des Raumfahrzeugs zu verfolgen. Die IMU wurde aus dem von Draper entwickelten Leitsystem für die Polaris-Rakete abgeleitet.
Trägheitsleitsysteme sind nicht perfekt und das Apollo-System driftete etwa ein Milliradian pro Stunde. Daher war es notwendig, die Trägheitsplattform regelmäßig durch Anvisieren von Sternen neu auszurichten.
Optische Einheiten[edit]



Die CM-Optikeinheit hatte einen am IMU-Rahmen befestigten Präzisionssextanten (SXT), der Winkel zwischen Sternen und Erd- oder Mondlandmarken oder dem Horizont messen konnte. Es hatte zwei Sichtlinien, eine 28-fache Vergrößerung und ein 1,8°-Sichtfeld. Die optische Einheit beinhaltete auch ein weites Sichtfeld (60°) Scanteleskop (SCT) mit geringer Vergrößerung für die Sternsichtung. Die optische Einheit könnte verwendet werden, um die CM-Position und -Orientierung im Raum zu bestimmen.


Der LM hatte stattdessen ein optisches Ausrichtungsteleskop (AOT), im Wesentlichen ein Periskop. Das äußere Element des AOT war ein sonnengeschütztes Prisma, das relativ zum LM in eine von sechs festen Positionen gedreht werden konnte, um einen großen Teil des Mondhimmels abzudecken. Jede Position hatte ein 60°-Sichtfeld. Beim Drehen war die Position des AOT von der AGC lesbar; indem er das Fadenkreuz auf zwei verschiedene Sterne richtete, konnte der Computer die Ausrichtung des Raumschiffs bestimmen.[3]
Der Pilot des Apollo 11-Befehlsmoduls, Michael Collins, stellte fest, dass die Sicht durch die Optik unterdurchschnittlich war und es bei bestimmten Lichtverhältnissen schwierig war, hindurch zu sehen.
Der Sonnenschutz wurde spät im Programm, im Jahr 1967, hinzugefügt, nachdem Tests und Modellierungen festgestellt hatten, dass die Astronauten aufgrund von direktem Sonnenlicht oder Licht, das von nahen Teilen des auftreffenden LMs gestreut wird, möglicherweise keine Sterne auf der Mondoberfläche sehen können das äußere Prisma. Durch das Hinzufügen des Sonnenschutzes konnte auch die Anzahl der Sichtpositionen von drei auf sechs erhöht werden.[1]: P. 41 ff


Software[edit]
Die Bordleitsoftware verwendete einen Kalman-Filter, um neue Daten mit früheren Positionsmessungen zusammenzuführen, um eine optimale Positionsschätzung für das Raumfahrzeug zu erstellen. Die Schlüsselinformation war eine Koordinatentransformation zwischen dem stabilen IMU-Teil und dem Referenzkoordinatensystem. Im Argot des Apollo-Programms war diese Matrix als REFSMMAT (für “Reference to Stable Member Matrix”) bekannt. Je nach Phase der Mission wurden zwei Referenzkoordinatensysteme verwendet, eines auf der Erde und eines auf dem Mond.
Trotz des Wortes “primär” im Namen waren PGNCS-Daten nicht die Hauptquelle für Navigationsinformationen. Tracking-Daten aus dem Deep Space Network der NASA wurden von Computern der Mission Control unter Verwendung von Algorithmen der kleinsten Quadrate verarbeitet. Die resultierenden Positions- und Geschwindigkeitsschätzungen waren genauer als die von PGNCS. Infolgedessen erhielten die Astronauten regelmäßig Zustandsvektoraktualisierungen, um sie auf der Grundlage von Bodendaten in die AGC einzugeben. PGNCS war nach wie vor unerlässlich, um die Orientierung des Raumfahrzeugs aufrechtzuerhalten, Raketen während des Manövrierens, einschließlich Mondlandung und Start, zu kontrollieren, und als Hauptquelle für Navigationsdaten während geplanter und unerwarteter Kommunikationsausfälle. PGNCS stellte auch eine Überprüfung der Bodendaten bereit.
Die Mondlandefähre verfügte über ein drittes Navigationsmittel, das von TRW gebaute Abort Guidance System (AGS). Diese sollte bei einem Ausfall von PGNCS verwendet werden. Das AGS konnte zum Abheben vom Mond und zum Rendezvous mit dem Kommandomodul verwendet werden, jedoch nicht zum Landen. Bei Apollo 13 wurde nach der kritischsten Verbrennung in der Nähe des Mondes das AGS anstelle von PGNCS verwendet, da es weniger Strom und Kühlwasser benötigte.
Apollo 11[edit]
Während der Apollo-11-Mission wurden zwei PGNCS-Alarme (1201 “No VAC area available” und 1202 “Executive alarm, no core set”) an die Missionsleitung weitergeleitet, als am 20. Juli 1969 die erste Mondlandung versucht wurde. Das Computersystem Die Überlastung wurde durch die gleichzeitige Erfassung von Landeradardaten und Rendezvous-Radardaten verursacht. Das Supportpersonal der Mission Control kam zu dem Schluss, dass die Alarme sicher ignoriert werden konnten und die Landung erfolgreich war.[4][5]
Siehe auch[edit]
Verweise[edit]
- ^ ein B Holley, MD (Mai 1976). “Apollo-Erfahrungsbericht – Leit- und Kontrollsysteme: Entwicklung von primären Leitsystemen, Navigations- und Kontrollsystemen, NASA TN D-8287” (PDF). Lyndon B. Johnson Space Center, USA. Nationale Luft- und Raumfahrtbehörde.
- ^ Der stille Krieg: Die Schlacht des Kalten Krieges unter dem Meer, John Pina Craven, Simon und Schuster, 2002, S.120
- ^ Das optische Teleskop zur Ausrichtung der Mondlandefähre von Apollo, Apollo Lunar Surface Journal
- ^ Eyles, Don (2004-02-06), Geschichten vom Leitcomputer der Mondlandefähre, abgerufen 2017-10-01
- ^ “Apollo 11 Lunar Surface Journal: Alarme programmieren”. www.hq.nasa.gov. Abgerufen 2017-04-16.
Recent Comments