True-Range-Multilateration – Wikipedia
True-Range-Multilateration ist ein Verfahren zum Bestimmen des Ortes eines beweglichen Fahrzeugs oder eines stationären Punktes im Raum unter Verwendung mehrerer Bereiche (Abstände) zwischen dem Fahrzeug / Punkt und mehreren räumlich getrennten bekannten Orten (häufig als “Stationen” bezeichnet). Der Name leitet sich ab von Trilaterationdas geometrische Problem der Bestimmung einer unbekannten Position in einer Ebene basierend auf dem Abstand zu anderen zwei bekannten Eckpunkten eines Dreiecks (der Länge von zwei Seiten). True Range Multilateration ist sowohl ein mathematisches Thema als auch eine angewandte Technik, die in verschiedenen Bereichen eingesetzt wird. Eine praktische Anwendung mit festem Standort ist die Trilaterationsmethode der Vermessung. Anwendungen, die den Standort des Fahrzeugs betreffen, werden als Navigation bezeichnet, wenn Personen / Geräte an Bord über ihren Standort informiert werden, und als Überwachung, wenn Einheiten außerhalb des Fahrzeugs über den Standort des Fahrzeugs informiert werden.
Zwei Neigungsbereiche von zwei bekannten Orten aus kann ein dritter Punkt in einem zweidimensionalen kartesischen Raum (Ebene) lokalisiert werden, was eine häufig angewandte Technik ist (z. B. bei der Vermessung). Ebenso zwei sphärische Bereiche kann verwendet werden, um einen Punkt auf einer Kugel zu lokalisieren, was ein grundlegendes Konzept der alten Disziplin der Himmelsnavigation ist – genannt Höhenabschnitt Problem. Wenn mehr als die Mindestanzahl von Bereichen verfügbar ist, empfiehlt es sich, diese ebenfalls zu verwenden. Dieser Artikel befasst sich mit dem allgemeinen Problem der Positionsbestimmung unter Verwendung mehrerer Bereiche.
In der zweidimensionalen Geometrie ist bekannt, dass, wenn ein Punkt auf zwei Kreisen liegt, die Kreismittelpunkte und die beiden Radien ausreichende Informationen liefern, um die möglichen Positionen auf zwei zu beschränken – von denen eine die gewünschte Lösung und die andere eine ist mehrdeutige Lösung. Zusätzliche Informationen beschränken die Möglichkeiten häufig auf einen eindeutigen Ort. Wenn in der dreidimensionalen Geometrie bekannt ist, dass ein Punkt auf den Oberflächen von drei Kugeln liegt, liefern die Zentren der drei Kugeln zusammen mit ihren Radien auch ausreichende Informationen, um die möglichen Positionen auf nicht mehr als zwei einzugrenzen (es sei denn, die Zentren liegen auf einer geraden Linie).
Die echte Multilateration im Bereich kann der häufiger auftretenden Multilateration (Pseudoentfernung) gegenübergestellt werden, bei der Entfernungsunterschiede verwendet werden, um einen (normalerweise beweglichen) Punkt zu lokalisieren. Die Pseudobereichs-Multilateration wird fast immer durch Messen der Ankunftszeiten (TOAs) von Energiewellen implementiert. Die Multilateration im wahren Bereich kann auch der Triangulation gegenübergestellt werden, bei der Winkel gemessen werden.
Für ähnliche Konzepte werden mehrere, manchmal überlappende und widersprüchliche Begriffe verwendet – z. Multilateration ohne Modifikation wurde für Luftfahrtsysteme verwendet, die sowohl wahre Bereiche als auch Pseudobereiche verwenden.[1][2] Darüber hinaus können unterschiedliche Tätigkeitsbereiche unterschiedliche Begriffe verwenden. In der Geometrie Trilateration ist definiert als der Prozess der Bestimmung der absoluten oder relativen Position von Punkten durch Messung von Abständen unter Verwendung der Geometrie von Kreisen, Kugeln oder Dreiecken. In der Vermessung, Trilateration ist eine spezielle Technik.[3][4][5] Der Begriff True Range Multilateration ist genau, allgemein und eindeutig. Autoren haben die Begriffe auch verwendet Reichweite-Reichweite und rho-rho Multilateration für dieses Konzept.
Umsetzungsfragen[edit]
Navigations- und Überwachungssysteme umfassen typischerweise Fahrzeuge und erfordern, dass eine Regierungsbehörde oder eine andere Organisation mehrere Stationen einsetzt, die eine Form der Funktechnologie verwenden (dh elektromagnetische Wellen verwenden). Die Vor- und Nachteile der Verwendung einer echten Bereichsmultilateration für ein solches System sind in der folgenden Tabelle gezeigt.
| Vorteile | Nachteile |
|---|---|
| Die Stationsstandorte sind flexibel. Sie können zentral oder peripher platziert werden | Oft muss ein Benutzer sowohl einen Sender als auch einen Empfänger haben |
| Die Genauigkeit nimmt mit der Entfernung vom Stationscluster langsam ab | Die Genauigkeit des kooperativen Systems ist empfindlich gegenüber Geräteumkehrfehlern |
| Benötigt eine Station weniger als ein Pseudo-Range-Multilaterationssystem | Kann nicht zur Stealth-Überwachung verwendet werden |
| Die Stationssynchronisation ist nicht anspruchsvoll (basierend auf der Geschwindigkeit des interessierenden Punkts und kann durch Dead Reckoning behoben werden). | Die nicht kooperative Überwachung führt zu Pfadverlusten zur vierten Potenz der Entfernung |
Die Multilateration im wahren Bereich wird häufig der Multilateration im (Pseudo-Bereich) gegenübergestellt, da beide eine Form von Benutzerbereichen zu mehreren Stationen erfordern. Die Komplexität und die Kosten der Benutzerausrüstung sind wahrscheinlich der wichtigste Faktor bei der Begrenzung der Verwendung der Multilateration mit echter Reichweite für die Fahrzeugnavigation und -überwachung. Einige Anwendungen sind nicht der ursprüngliche Zweck für die Systembereitstellung – z. B. DME / DME-Flugzeugnavigation.
Bereiche erhalten[edit]
Für ähnliche Entfernungen und Messfehler bietet ein Navigations- und Überwachungssystem, das auf einer echten Entfernungsmultilateration basiert, einen Dienst für einen wesentlich größeren 2D-Bereich oder ein 3D-Volumen als Systeme, die auf einer Pseudoentfernungsmultilateration basieren. Es ist jedoch oft schwieriger oder kostspieliger, wahre Bereiche zu messen, als Pseudobereiche zu messen. Für Entfernungen bis zu einigen Kilometern und feste Standorte kann die tatsächliche Reichweite manuell gemessen werden. Dies geschieht seit mehreren tausend Jahren in der Vermessung – z. B. mit Seilen und Ketten.
Für größere Entfernungen und / oder sich bewegende Fahrzeuge wird im Allgemeinen ein Funk- / Radarsystem benötigt. Diese Technologie wurde erstmals um 1940 in Verbindung mit Radar entwickelt. Seitdem wurden drei Methoden angewendet:
- Zweiwege-Entfernungsmessung, eine Partei aktiv – Dies ist die Methode, die von herkömmlichen Radargeräten verwendet wird (manchmal auch als Radar bezeichnet) primär Radargeräte), um die Reichweite eines nicht kooperativen Ziels zu bestimmen, das jetzt von Laser-Entfernungsmessern verwendet wird. Die Hauptbeschränkungen bestehen darin, dass: (a) sich das Ziel nicht selbst identifiziert und in einer Situation mit mehreren Zielen eine Fehlzuweisung einer Rendite auftreten kann; (b) das Rücksignal wird (relativ zum gesendeten Signal) um die vierte Potenz des Fahrzeugstationsbereichs gedämpft (daher benötigen Stationen für Entfernungen von mehreren zehn Meilen oder mehr im Allgemeinen Hochleistungssender und / oder große / empfindliche Sender Antennen); und (c) viele Systeme verwenden eine Sichtlinienausbreitung, die ihre Reichweite auf weniger als 20 Meilen begrenzt, wenn sich beide Parteien auf ähnlichen Höhen über dem Meeresspiegel befinden.
- Zweiwege-Entfernungsmessung, beide Parteien aktiv – Diese Methode wurde Berichten zufolge erstmals für die Navigation durch das Y-Gerät-Flugzeugleitsystem verwendet, das 1941 von der Luftwaffe eingesetzt wurde. Es wird heute weltweit in der Flugsicherung eingesetzt – z. sekundär Radarüberwachung und DME / DME-Navigation. Es erfordert, dass beide Parteien sowohl Sender als auch Empfänger haben, und möglicherweise müssen Interferenzprobleme behoben werden.
- Einweg-Entfernungsmessung – Die Flugzeit (TOF) der elektromagnetischen Energie zwischen mehreren Stationen und dem Fahrzeug wird basierend auf dem Senden durch eine Partei und dem Empfang durch die andere Partei gemessen. Dies ist die zuletzt entwickelte Methode und wurde durch die Entwicklung von Atomuhren ermöglicht. es erfordert, dass das Fahrzeug (Benutzer) und die Stationen synchronisierte Uhren haben. Es wurde erfolgreich mit Loran-C und GPS demonstriert.[6][7] Aufgrund der erforderlichen Benutzerausrüstung (typischerweise eine Atomuhr) wird es jedoch nicht als für eine breite Verwendung geeignet angesehen.
Lösungsmethoden[edit]
|
Diese Abteilung braucht Erweiterung. Sie können helfen, indem Sie es hinzufügen. (Juni 2017)
|

True Range Multilateration Algorithmen können basierend auf (a) Problemraumdimension (im Allgemeinen zwei oder drei), (b) Problemraumgeometrie (im Allgemeinen kartesisch oder sphärisch) und (c) Vorhandensein redundanter Messungen (mehr als die Problemraumdimension) partitioniert werden.
Zwei kartesische Dimensionen, zwei gemessene Neigungsbereiche (Trilateration)[edit]


Eine analytische Lösung ist wahrscheinlich seit über 1.000 Jahren bekannt und wird in mehreren Texten angegeben.[8] Darüber hinaus kann man Algorithmen leicht für einen dreidimensionalen kartesischen Raum anpassen.
Der einfachste Algorithmus verwendet eine analytische Geometrie und einen stationären Koordinatenrahmen. Betrachten Sie daher die Kreismittelpunkte (oder Stationen) C1 und C2 in Fig. 1, die bekannte Koordinaten haben (z. B. bereits vermessen wurden) und somit deren Trennung
U.{ displaystyle U}ist bekannt. Die Abbildung ‘Seite’ enthält C1 und C2. Wenn ein dritter “Punkt von Interesse” P. (z. B. ein Fahrzeug oder ein anderer zu vermessender Punkt) befindet sich an einem unbekannten Punkt
(x,y){ displaystyle (x, y)}

, dann ergibt der Satz von Pythagoras


- r12=x2+y2r22=(U.– –x)2+y2{ displaystyle { begin {align} r_ {1} ^ {2} & = x ^ {2} + y ^ {2} \[4pt]r_ {2} ^ {2} & = (Ux) ^ {2} + y ^ {2} end {align}}}

![{ displaystyle { begin {align} r_ {1} ^ {2} & = x ^ {2} + y ^ {2} \[4pt]r_ {2} ^ {2} & = (Ux) ^ {2} + y ^ {2} end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/75417a7cc7c30bde5d833ed87fd7bac94bdf7ce0)
So,
-
-
x=r12– –r22+U.22U.y=±r12– –x2{ displaystyle { begin {align} x & = { frac {r_ {1} ^ {2} -r_ {2} ^ {2} + U ^ {2}} {2U}} \[4pt]y & = pm { sqrt {r_ {1} ^ {2} -x ^ {2}}} end {align}}}
(1)
-

![{ displaystyle { begin {align} x & = { frac {r_ {1} ^ {2} -r_ {2} ^ {2} + U ^ {2}} {2U}} \[4pt]y & = pm { sqrt {r_ {1} ^ {2} -x ^ {2}}} end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ebcc6eb379df69ed08e8e83b5c4488c83481b3e3)
Während es viele Verbesserungen gibt, ist Gleichung 1 ist die grundlegendste True-Range-Multilaterationsbeziehung. Die DME / DME-Navigation von Flugzeugen und die Trilaterationsmethode der Vermessung sind Beispiele für ihre Anwendung. Während des Zweiten Weltkriegs Oboe und während des Koreakrieges führte SHORAN das gleiche Prinzip, um Flugzeuge basierend auf gemessenen Entfernungen zu zwei Bodenstationen zu führen. SHORAN wurde später für die Offshore-Ölexploration und für die Luftvermessung verwendet. Das Luftbildvermessungssystem von Australian Aerodist verwendete eine kartesische 2-D-True-Range-Multilateration.[9] Dieses 2-D-Szenario ist ausreichend wichtig, um den Begriff Trilateration wird häufig auf alle Anwendungen angewendet, die eine bekannte Basislinie und zwei Entfernungsmessungen umfassen.
Die Grundlinie, die die Mittelpunkte der Kreise enthält, ist eine Symmetrielinie. Die richtigen und mehrdeutigen Lösungen sind senkrecht zur Grundlinie und von dieser gleich weit entfernt (auf gegenüberliegenden Seiten). Normalerweise ist die mehrdeutige Lösung leicht zu identifizieren. Zum Beispiel wenn P. Wenn es sich um ein Fahrzeug handelt, ist jede Bewegung zur Grundlinie hin oder von dieser weg der der mehrdeutigen Lösung entgegengesetzt. Somit ist eine grobe Messung des Fahrzeugkurses ausreichend. Ein zweites Beispiel: Vermesser wissen genau, auf welcher Seite der Grundlinie das liegt P. Lügen. Ein drittes Beispiel: in Anwendungen, in denen P. ist ein Flugzeug und C1 und C2 Sind am Boden, ist die mehrdeutige Lösung in der Regel unter der Erde.
Bei Bedarf die Innenwinkel des Dreiecks C1-C2-P kann unter Verwendung des trigonometrischen Gesetzes von Cosinus gefunden werden. Bei Bedarf auch die Koordinaten von P. kann in einem zweiten, bekannteren Koordinatensystem ausgedrückt werden – z. B. dem UTM-System (Universal Transverse Mercator) -, sofern die Koordinaten von C1 und C2 sind in diesem zweiten System bekannt. Beide werden häufig bei der Vermessung durchgeführt, wenn die Trilaterationsmethode angewendet wird.[10] Sobald die Koordinaten von P. sind eingerichtet, Linien C1-P und C2-P kann als neue Basislinie verwendet und zusätzliche Punkte vermessen werden. Auf diese Weise können große Flächen oder Entfernungen anhand mehrerer kleinerer Dreiecke vermessen werden, die als a bezeichnet werden Traverse.
Eine implizite Annahme, dass die obige Gleichung wahr ist, ist die folgende
r1{ displaystyle r_ {1}}und
r2{ displaystyle r_ {2}}

beziehen sich auf die gleiche Position von P.. Wann P. ist dann typischerweise ein Fahrzeug
r1{ displaystyle r_ {1}}
und
r2{ displaystyle r_ {2}}muss innerhalb einer Synchronisationstoleranz gemessen werden, die von der Fahrzeuggeschwindigkeit und dem zulässigen Fahrzeugpositionsfehler abhängt. Alternativ kann die Fahrzeugbewegung zwischen Entfernungsmessungen berücksichtigt werden, häufig durch Dead Reckoning.
Eine trigonometrische Lösung ist ebenfalls möglich (Side-Side-Side-Fall). Auch eine Lösung mit Grafiken ist möglich. Manchmal wird während der Echtzeitnavigation eine grafische Lösung als Überlagerung auf einer Karte verwendet.
Drei kartesische Dimensionen, drei gemessene Neigungsbereiche[edit]
Es gibt mehrere Algorithmen, die das kartesische 3-D-Problem der Multilateration im wahren Bereich direkt (dh in geschlossener Form) lösen – z. B. Fang.[11] Darüber hinaus kann man geschlossene Algorithmen anwenden, die für die Pseudobereichsmultilateration entwickelt wurden.[12][8] Bancrofts Algorithmus[13] (angepasst) verwendet Vektoren, was in einigen Situationen von Vorteil ist.

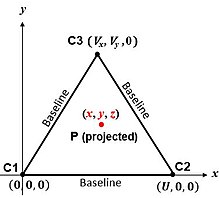
Der einfachste Algorithmus entspricht den Kugelzentren in Abb. 2. Die Abbildung ‘Seite’ ist die Ebene, die enthält C1, C2 und C3. Wenn P. ist ein “Point of Interest” (z. B. Fahrzeug) bei
(x,y,z){ displaystyle (x, y, z)}dann liefert der Satz von Pythagoras die Neigungsbereiche zwischen P. und die Kugelzentren:


- r12=x2+y2+z2r22=(x– –U.)2+y2+z2r32=(x– –V.x)2+(y– –V.y)2+z2{ displaystyle { begin {align} r_ {1} ^ {2} & = x ^ {2} + y ^ {2} + z ^ {2} \[4pt]r_ {2} ^ {2} & = (xU) ^ {2} + y ^ {2} + z ^ {2} \[4pt]r_ {3.

![{ displaystyle { begin {align} r_ {1} ^ {2} & = x ^ {2} + y ^ {2} + z ^ {2} \[4pt]r_ {2} ^ {2} & = (xU) ^ {2} + y ^ {2} + z ^ {2} \[4pt]r_ {3} ^ {2} & = (x-V_ {x}) ^ {2} + (y-V_ {y}) ^ {2} + z ^ {2} end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c79d1b3b07b4a53e3567564dd212e76f1146473e)
Also lassen
V.2=V.x2+V.y2{ displaystyle V ^ {2} = V_ {x} ^ {2} + V_ {y} ^ {2}}, die Koordinaten von P. sind:


-
-
x=r12– –r22+U.22U.y=r12– –r32+V.2– –2V.xx2V.yz=±r12– –x2– –y2{ displaystyle { begin {align} x & = { frac {r_ {1} ^ {2} -r_ {2} ^ {2} + U ^ {2}} {2U}} \[4pt]y & = { frac {r_ {1} ^ {2} -r_ {3} ^ {2} + V ^ {2} -2V_ {x} x} {2V_ {y}}} \[4pt]z & = pm { sqrt {r_ {1} ^ {2} -x ^ {2} -y ^ {2}}} end {align}}}
(2)
-

![{ displaystyle { begin {align} x & = { frac {r_ {1} ^ {2} -r_ {2} ^ {2} + U ^ {2}} {2U}} \[4pt]y & = { frac {r_ {1} ^ {2} -r_ {3} ^ {2} + V ^ {2} -2V_ {x} x} {2V_ {y}}} \[4pt]z & = pm { sqrt {r_ {1} ^ {2} -x ^ {2} -y ^ {2}}} end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bfc991360d8b05be2e1aa68150d8c32a5543a6e8)
Die Ebene mit den Kugelzentren ist eine Symmetrieebene. Die richtigen und mehrdeutigen Lösungen sind senkrecht dazu und auf gegenüberliegenden Seiten gleich weit davon entfernt.
Viele Anwendungen der 3-D-True-Range-Multilateration umfassen kurze Entfernungen, z. B. Präzisionsfertigung.[14] Die Integration der Entfernungsmessung von drei oder mehr Radargeräten (z. B. ERAM der FAA) ist eine 3D-Flugzeugüberwachungsanwendung. Die 3D-Multilateration mit echter Reichweite wurde experimentell mit GPS-Satelliten für die Flugzeugnavigation verwendet.[7] Die Anforderung, dass ein Flugzeug mit einer Atomuhr ausgestattet sein muss, schließt seine allgemeine Verwendung aus. Die Unterstützung der Uhr des GPS-Empfängers ist jedoch ein Bereich aktiver Forschung, einschließlich der Unterstützung über ein Netzwerk. Daher können sich die Schlussfolgerungen ändern.[15] Die 3-D-Multilateration mit echter Reichweite wurde von der Internationalen Zivilluftfahrt-Organisation als Flugzeuglandesystem bewertet, eine andere Technik erwies sich jedoch als effizienter.[16] Die genaue Messung der Höhe von Flugzeugen während des Anflugs und der Landung erfordert viele Bodenstationen entlang der Flugbahn.
Zwei sphärische Dimensionen, zwei oder mehr gemessene sphärische Bereiche[edit]


Dies ist ein klassisches himmlisches (oder astronomisches) Navigationsproblem, das als bezeichnet wird Höhenabschnitt Problem (Abb. 3). Es ist das sphärische Geometrieäquivalent der Trilaterationsmethode der Vermessung (obwohl die Entfernungen im Allgemeinen viel größer sind). Eine Lösung auf See (nicht unbedingt mit Sonne und Mond) wurde durch den 1761 eingeführten Marine-Chronometer und die Entdeckung der Positionslinie (LOP) im Jahr 1837 ermöglicht. Die heute am meisten an Universitäten gelehrte Lösungsmethode ( z. B. US Naval Academy) verwendet sphärische Trigonometrie, um ein schräges sphärisches Dreieck zu lösen, das auf Sextantenmessungen der “Höhe” zweier Himmelskörper basiert.[17][18] Dieses Problem kann auch mithilfe der Vektoranalyse behoben werden.[19] In der Vergangenheit wurden grafische Techniken – z. B. die Intercept-Methode – eingesetzt. Diese können mehr als zwei gemessene “Höhen” aufnehmen. Aufgrund der Schwierigkeit, Messungen auf See durchzuführen, werden häufig 3 bis 5 Höhenlagen empfohlen.
Da die Erde besser als Rotationsellipsoid als als Kugel modelliert ist, können in modernen Implementierungen iterative Techniken verwendet werden.[20] In Flugzeugen und Raketen in großer Höhe wird häufig ein Himmelsnavigationssubsystem in ein Trägheitsnavigationssubsystem integriert, um eine automatisierte Navigation durchzuführen, z. B. US Air Force SR-71 Blackbird und B-2 Spirit.
Loran-C ist zwar als “sphärisches” Pseudo-Range-Multilaterationssystem gedacht, wurde aber auch von gut ausgestatteten Benutzern (z. B. Canadian Hydrographic Service) als “sphärisches” True-Range-Multilaterationssystem verwendet.[6] Dadurch konnte der Versorgungsbereich einer Loran-C-Stations-Triade erheblich erweitert (z. B. verdoppelt oder verdreifacht) und die Mindestanzahl verfügbarer Sender von drei auf zwei reduziert werden. In der modernen Luftfahrt werden eher Neigungsbereiche als sphärische Bereiche gemessen. Wenn jedoch die Flughöhe bekannt ist, werden Neigungsbereiche leicht in sphärische Bereiche umgewandelt.[8]
Redundante Entfernungsmessungen[edit]
Wenn mehr Entfernungsmessungen verfügbar sind als Problemdimensionen, entweder von derselben C1 und C2 (oder C1, C2 und C3) Stationen oder von zusätzlichen Stationen ergeben sich mindestens folgende Vorteile:
- “Schlechte” Messungen können identifiziert und zurückgewiesen werden
- Mehrdeutige Lösungen können automatisch identifiziert werden (dh ohne menschliches Eingreifen) – erfordert eine zusätzliche Station
- Fehler bei “guten” Messungen können gemittelt werden, wodurch ihre Auswirkung verringert wird.
Der iterative Gauß-Newton-Algorithmus zur Lösung nichtlinearer Probleme der kleinsten Quadrate (NLLS) wird im Allgemeinen bevorzugt, wenn mehr “gute” Messungen als das erforderliche Minimum vorliegen. Ein wichtiger Vorteil der Gauß-Newton-Methode gegenüber vielen Algorithmen in geschlossener Form besteht darin, dass Entfernungsfehler linear behandelt werden, was häufig ihre Natur ist, wodurch die Auswirkung von Entfernungsfehlern durch Mittelwertbildung verringert wird.[12] Die Gauß-Newton-Methode kann auch mit der minimalen Anzahl gemessener Bereiche verwendet werden. Da es iterativ ist, erfordert die Gauß-Newton-Methode eine anfängliche Lösungsschätzung.
Im kartesischen 3D-Raum eliminiert eine vierte Kugel die mehrdeutige Lösung, die bei drei Bereichen auftritt, vorausgesetzt, ihr Zentrum ist nicht koplanar mit den ersten drei. Im kartesischen oder sphärischen 2D-Raum eliminiert ein dritter Kreis die mehrdeutige Lösung, die bei zwei Bereichen auftritt, vorausgesetzt, sein Zentrum ist nicht kolinear mit den ersten beiden.
Einmalige Anwendung versus wiederholte Anwendung[edit]
Dieser Artikel beschreibt weitgehend die “einmalige” Anwendung der True Range Multilateration-Technik, die die grundlegendste Anwendung der Technik darstellt. In Bezug auf Fig. 1 ist das Merkmal von “einmaligen” Situationen dieser Punkt P. und mindestens eine von C1 und C2 Wechsel von einer Anwendung der True Range Multilateration-Technik zur nächsten. Dies ist für Vermessung, Himmelsnavigation mit manuellen Sichtungen und einige Flugzeug-DME / DME-Navigation geeignet.
In anderen Situationen wird die True-Range-Multilaterationstechnik jedoch wiederholt (im Wesentlichen kontinuierlich) angewendet. In diesen Situationen C1 und C2 (und vielleicht Cn, n = 3,4, …) konstant bleiben und P. ist das gleiche Fahrzeug. Beispielanwendungen (und ausgewählte Intervalle zwischen Messungen) sind: Überwachung mehrerer Radarflugzeuge (5 und 12 Sekunden, abhängig vom Radarabdeckungsbereich), Luftvermessung, Loran-C-Navigation mit einer hochgenauen Benutzeruhr (ungefähr 0,1 Sekunden) und einige Flugzeug DME / DME Navigation (ca. 0,1 Sekunden). Im Allgemeinen Implementierungen für die wiederholte Verwendung: (a) Verwenden eines “Tracker” -Algorithmus[21] (zusätzlich zum Multilaterationslösungsalgorithmus), mit dem zu verschiedenen Zeiten gesammelte Messungen auf irgendeine Weise verglichen und gemittelt werden können; und (b) einen iterativen Lösungsalgorithmus verwenden, da sie (b1) eine unterschiedliche Anzahl von Messungen (einschließlich redundanter Messungen) zulassen und (b2) jedes Mal, wenn der Lösungsalgorithmus aufgerufen wird, von Natur aus eine anfängliche Schätzung haben.
Hybride Multilaterationssysteme[edit]
Hybride Multilaterationssysteme – solche, die weder True Range- noch Pseudo Range-Systeme sind – sind ebenfalls möglich. Zum Beispiel in Fig. 1, wenn die Kreismittelpunkte nach links verschoben sind, so dass C1 ist bei
x1‘=– –12U.,y1‘=0{ displaystyle x_ {1} ^ { prime} = – { tfrac {1} {2}} U, y_ {1} ^ { prime} = 0}und C2 ist bei
x2‘=12U.,y2‘=0{ displaystyle x_ {2} ^ { prime} = { tfrac {1} {2}} U, y_ {2} ^ { prime} = 0}

dann der Punkt von Interesse P. ist bei


- x‘=(r1‘+r2‘)(r1‘– –r2‘)2U.y‘=±(r1‘+r2‘)2– –U.2U.2– –(r1‘– –r2‘)22U.{ displaystyle { begin {align} x ^ { prime} & = { frac {(r_ {1} ^ { prime} + r_ {2} ^ { prime}) (r_ {1} ^ { prime} -r_ {2} ^ { prime})} {2U}} \[4pt]y ^ { prime} & = pm { frac {{ sqrt {(r_ {1} ^ { prime} + r_ {2} ^ { prime}) ^ {2} -U ^ {2}} } { sqrt {U ^ {2} – (r_ {1} ^ { prime} -r_ {2} ^ { prime}) ^ {2}}} {2U}} end {align}}}

![{ displaystyle { begin {align} x ^ { prime} & = { frac {(r_ {1} ^ { prime} + r_ {2} ^ { prime}) (r_ {1} ^ { prime} -r_ {2} ^ { prime})} {2U}} \[4pt]y ^ { prime} & = pm { frac {{ sqrt {(r_ {1} ^ { prime} + r_ {2} ^ { prime}) ^ {2} -U ^ {2}} } { sqrt {U ^ {2} - (r_ {1} ^ { prime} -r_ {2} ^ { prime}) ^ {2}}} {2U}} end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/656d76a6985f39c396e1a9bda6019b29877112fb)
Diese Form der Lösung hängt explizit von der Summe und Differenz von ab
r1‘{ displaystyle r_ {1} ^ { prime}}und
r2‘{ displaystyle r_ {2} ^ { prime}}

und erfordert keine “Verkettung” von der
x‘{ displaystyle x ^ { prime}}
-Lösung zum
y‘{ displaystyle y ^ { prime}}

-Lösung. Es könnte durch Messung als echtes Range-Multilaterationssystem implementiert werden
r1‘{ displaystyle r_ {1} ^ { prime}}

und
r2‘{ displaystyle r_ {2} ^ { prime}}.
Es könnte jedoch auch durch Messung als hybrides Multilaterationssystem implementiert werden
r1‘+r2‘{ displaystyle r_ {1} ^ { prime} + r_ {2} ^ { prime}}und
r1‘– –r2‘{ displaystyle r_ {1} ^ { prime} -r_ {2} ^ { prime}}

Verwendung unterschiedlicher Geräte – z. B. zur Überwachung durch ein multistatisches Radar mit einem Sender und zwei Empfängern (anstelle von zwei monostatischen Radargeräten). Das Eliminieren eines Senders ist zwar ein Vorteil, es entstehen jedoch Gegenkosten: Die Synchronisationstoleranz für die beiden Stationen hängt eher von der Ausbreitungsgeschwindigkeit (typischerweise der Lichtgeschwindigkeit) als von der Punktgeschwindigkeit ab P., um beide genau zu messen
r1‘±r2‘{ displaystyle r_ {1} ^ { prime} pm r_ {2} ^ { prime}}
.

Obwohl nicht betriebsbereit, wurden hybride Multilaterationssysteme für die Flugzeugüberwachung in der Nähe von Flughäfen und als GPS-Navigations-Backup-System für die Luftfahrt untersucht.[22]
Vorläufige und endgültige Berechnungen[edit]
|
Diese Abteilung braucht Erweiterung. Sie können helfen, indem Sie es hinzufügen. (Juni 2018)
|

Die Positionsgenauigkeit eines Multilaterationssystems mit echtem Bereich – z. B. die Genauigkeit des
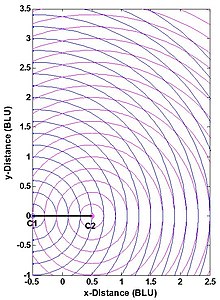
(x,y){ displaystyle (x, y)}Punktkoordinaten P. in Fig. 1 – hängt von zwei Faktoren ab: (1) der Entfernungsmessgenauigkeit und (2) der geometrischen Beziehung von P. zu den Stationen des Systems C1 und C2. Dies ist aus Fig. 4 ersichtlich. Die zwei Stationen sind als Punkte gezeigt, und BLU bezeichnet Basislinieneinheiten. (Das Messmuster ist sowohl um die Grundlinie als auch um die senkrechte Winkelhalbierende der Grundlinie symmetrisch und in der Figur abgeschnitten.) Wie üblicherweise wird angenommen, dass einzelne Entfernungsmessfehler unabhängig von der Entfernung, statistisch unabhängig und identisch verteilt sind. Diese vernünftige Annahme trennt die Auswirkungen von Fehlern der Benutzerstationsgeometrie und der Entfernungsmessung auf den Fehler in der berechneten
(x,y){ displaystyle (x, y)}Koordinaten von P.. Hier ist die Messgeometrie einfach der Winkel, in dem sich zwei Kreise kreuzen – oder äquivalent der Winkel zwischen Linien P-C1 und P-C2. Wann Punkt P- Befindet sich kein Kreis, ist der Fehler in seiner Position ungefähr proportional zu der Fläche, die von den nächsten zwei blauen und zwei magentafarbenen Kreisen begrenzt wird.
Ohne redundante Messungen kann ein echtes Entfernungsmultilaterationssystem nicht genauer sein als die Entfernungsmessungen, kann jedoch erheblich weniger genau sein, wenn die Messgeometrie nicht richtig gewählt wird. Dementsprechend beschränken einige Anwendungen die Position des Punkts P.. Für eine kartesische 2D-Situation (Trilateration) haben diese Einschränkungen eine von zwei äquivalenten Formen:
- Der zulässige Innenwinkel bei P. zwischen Zeilen P-C1 und P-C2: Das Ideal ist ein rechter Winkel, der in Abständen von der Grundlinie von der Hälfte oder weniger der Grundlinienlänge auftritt; Es können maximal zulässige Abweichungen von den idealen 90 Grad angegeben werden.
- Die horizontale Präzisionsverdünnung (HDOP), die den Entfernungsfehler bei der Bestimmung des Positionsfehlers multipliziert: Für zwei Dimensionen ist die ideale (minimale) HDOP die Quadratwurzel von 2 (
2≈1.414{ displaystyle { sqrt {2}} ca. 1.414} ), die auftritt, wenn der Winkel zwischen P-C1 und P-C2 ist 90 Grad; Es kann ein maximal zulässiger HDOP-Wert angegeben werden. (Hier sind gleiche HDOPs einfach der Ort von Punkten in 4 mit demselben Kreuzungswinkel.)



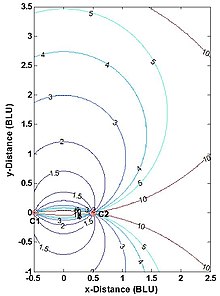
Die Planung eines Navigations- oder Überwachungssystems für echte Entfernungsmultilateration erfordert häufig eine DOP-Analyse (Dilution of Precision), um Entscheidungen über die Anzahl und den Standort der Stationen und den Servicebereich (zwei Dimensionen) oder das Servicevolumen (drei Dimensionen) des Systems zu treffen.[23][24] Fig. 5 zeigt horizontale DOPs (HDOPs) für ein 2-D-Zwei-Stationen-True-Range-Multilaterationssystem. HDOP ist entlang der Grundlinie und ihrer Erweiterungen unendlich, da nur eine der beiden Dimensionen tatsächlich gemessen wird. Ein Benutzer eines solchen Systems sollte ungefähr auf der Breitseite der Basislinie und innerhalb eines anwendungsabhängigen Bereichsbereichs liegen. Beispielsweise ist für DME / DME-Navigationskorrekturen durch Flugzeuge der von der US-amerikanischen FAA zulässige maximale HDOP doppelt so hoch wie der minimal mögliche Wert oder 2,828.[25] Dies begrenzt den maximalen Verwendungsbereich (der entlang der Grundlinienhalbierenden auftritt) auf das 1,866-fache der Grundlinienlänge. (Das Flugzeug mit zwei DME-Bodenstationen und einem Flugzeug befindet sich nicht streng horizontal, ist aber normalerweise fast so.) In ähnlicher Weise wählen Vermesser einen Punkt aus P. in Fig. 1 damit C1-C2-P bilden Sie ungefähr ein gleichseitiges Dreieck (wobei HDOP = 1,633).
Fehler in Trilaterationserhebungen werden in mehreren Dokumenten erörtert.[26][27] Im Allgemeinen wird der Schwerpunkt eher auf die Auswirkungen von Entfernungsmessfehlern als auf die Auswirkungen von numerischen Algorithmusfehlern gelegt.
Beispielanwendungen[edit]
Siehe auch[edit]
Verweise[edit]
- ^ “Nutzungskonzept der Multilateration (MLAT)”, Internationale Zivilluftfahrt-Organisation, 2007
- ^ ein b “Radar-Grundlagen”Christian Wolff, undatiert
- ^ Encyclopædia Britannica
- ^ Diracdelta Archiviert 2010-08-12 an der Wayback-Maschine
- ^ freies Wörterbuch
- ^ ein b “Rho-Rho Loran-C kombiniert mit Satellitennavigation für Offshore-Vermessungen”. ST Grant, International Hydrographic Reviewundatiert
- ^ ein b Einfluss der Rubidium Clock Aiding auf die GPS Augmented Vehicle Navigation, Zhaonian Zhang; Universität von Calgary; Dezember 1997.
- ^ ein b c Erdbezogene Flugzeugnavigations- und Überwachungsanalyse, Michael Geyer, US-amerikanisches DOT John A. Volpe Nationales Transportsystemzentrum, Juni 2016.
- ^ Adastra Luftaufnahmen abgerufen am 22. Januar 2019.
- ^ “Die Natur der geografischen Information: Trilateration”, Pennsylvania State Univ., 2018.
- ^ “Trilateration und Erweiterung der globalen Positionierungssystemnavigation”, BT Fang, Zeitschrift für Führung, Kontrolle und Dynamikvol. 9 (1986), S. 715–717.
- ^ ein b “Geschlossene Algorithmen in der mobilen Positionierung: Mythen und Missverständnisse”, Niilo Sirola, Vorträge des 7. Workshops zu Positionierung, Navigation und Kommunikation 2010 (WPNC’10), 11. März 2010.
- ^ “Eine algebraische Lösung der GPS-Gleichungen”Stephen Bancroft, IEEE-Transaktionen in der Luft- und Raumfahrt sowie in elektronischen Systemen, Band: AES-21, Ausgabe: 7 (Januar 1985), S. 56–59.
- ^ ein b LaserTracer – Eine neue Art von selbstverfolgendem Laserinterferometer, Carl-Thomas Schneider, IWAA2004, CERN, Genf, Oktober 2004
- ^ “Wie eine Atomuhr im Chip-Maßstab dazu beitragen kann, Breitbandstörungen zu verringern”;; Fang-Cheng Chan, Mathieu Jörger, Samer Khanafseh, Boris Pervan und Ondrej Jakubov; GPS World – Innovationen;; Mai 2014.
- ^ “Mikrowellenlandesystem”;; Thomas E. Evans; IEEE Aerospace and Electronic Systems Magazine;; Vol. 1, Ausgabe 5; Mai 1986.
- ^ Sphärische TrigonometrieIsaac Todhunter, MacMillan; 5. Auflage, 1886.
- ^ Eine Abhandlung über sphärische Trigonometrie und ihre Anwendung auf Geodäsie und Astronomie mit zahlreichen BeispielenJohn Casey, Dublin, Hodges, Figgis & Co., 1889.
- ^ “Vektorbasierte Geodäsie”Chris Veness. 2016.
- ^ “STELLA (System zur astronomischen Schätzung von Breiten- und Längengraden)”, George Kaplan, John Bangert, Nancy Oliversen; US Naval Observatory, 1999.
- ^ Tracking und Datenfusion: Ein Handbuch der Algorithmen;; Y. Bar-Shalom, PK Willett, X. Tian; 2011
- ^ “Alternative Position, Navigation und Timing: Die Notwendigkeit einer robusten Radionavigation”;; MJ Narins, LV Eldredge, P. Enge, SC Lo, MJ Harrison und R. Kenagy; Kapitel in Globale NavigationssatellitensystemeGemeinsamer Workshop der National Academy of Engineering und der Chinese Academy of Engineering (2012).
- ^ “Verdünnung der Präzision”, Richard Langeley, GPS-WeltMai 1999, S. 52–59.
- ^ Genauigkeitsbeschränkungen von (sphärischen) Range-Range-MultilaterationssystemenHarry B. Lee, Massachusetts Institute of Technology, Lincoln Laboratory, Technische Anmerkung 1973-43, 11. Oktober 1973.
- ^ ein b “DME / DME für alternative Position, Navigation und Timing (APNT)”, Robert W. Lilley und Robert Erikson, Federal Aviation Administration, Weißbuch, 23. Juli 2012.
- ^ Vergleich der Genauigkeit von Triangulation, Trilateration und Triangulation-Trilateration;; KL Provoro; Nowosibirsk Institute of Engineers of Geodesy; 1960.
- ^ “Trilateration in der maritimen Archäologie”, YouTube, US National Oceanic and Atmospheric Administration, 2006.
- ^ “DME / DME-Genauigkeit”, Michael Tran, Bericht des Nationalen Technischen Treffens 2008 des Instituts für Schifffahrt, San Diego, CA, Januar 2008, S. 443–451.
Recent Comments