磁力または電磁力 それは、移動荷重の分布に関するオブザーバーであるローレンツの力の一部です。磁力は、電子などの電荷粒子の動きによって生成され、電気と磁気の間の密接な関係を示しています。
磁石および/または電磁石の間の磁力は、政治的負荷間の磁力の影響です。これは、磁石の中に閉じた磁場ラインを生じさせるマイクロ電流があり、材料を残して再入力するためです。入り口はポールを形成し、別のポールを出ます。
ドライバーの磁力 [ 編集します ]
ドライバーは、電流が循環するケーブルまたはワイヤーにすることができます。電流は、移動する電気荷重のセットです。磁場は移動荷重に横方向の力を発揮するため、各荷重の力の結果は、電流が循環するワイヤに横方向の力をもたらすと予想されます。
直線導体 [ 編集します ]
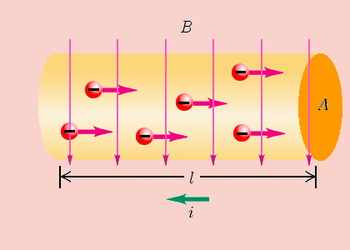
長さの直線導体のセクション l 、強度を輸送します 私 磁場に配置されます b
図には、長さのワイヤの伸びが示されています
 現在
現在
 そして、それは磁場に配置されます
そして、それは磁場に配置されます
 。現在の密度ベクトルを簡素化するためには、方向付けられています
。現在の密度ベクトルを簡素化するためには、方向付けられています
 それが垂直であるような方法で
それが垂直であるような方法で
。
現在
直線導体では、それは遊離電子によって輸送され、
 ワイヤボリューム単位あたりのこれらの電子の数。これらの電子の1つで機能する平均力の大きさは、によって与えられます。
ワイヤボリューム単位あたりのこれらの電子の数。これらの電子の1つで機能する平均力の大きさは、によって与えられます。

存在するために
 そして存在
そして存在
 ドラッグスピード:
ドラッグスピード:
 。したがって、
。したがって、

長さ
ドライバーには含まれています
 自由電子、存在
自由電子、存在
 クロスセクションドライバーセクションのボリューム
クロスセクションドライバーセクションのボリューム
 それは考慮されています。ドライバー、したがって、ドライバー自体の自由電子の総力は次のとおりです。
それは考慮されています。ドライバー、したがって、ドライバー自体の自由電子の総力は次のとおりです。

とすれば
 それは現在です
それは現在です
ドライバーには、あなたが持っています:

ドライバーの右に移動する負の負荷は、左に移動する正の電荷、つまり緑色の矢の方向に相当します。これらの肯定的な料金の1つについては、速度
 左を指してドライバーに力を与えます
左を指してドライバーに力を与えます
 フィギュアの平面を離れることを指してください。この同じ結論は、本当のネガティブな貨物庫がどのであると見なされるならに推定されます
フィギュアの平面を離れることを指してください。この同じ結論は、本当のネガティブな貨物庫がどのであると見なされるならに推定されます
右側を指しますが
 ネガティブな兆候があります。したがって、電流を持つドライバーで動作し、磁場に配置された横方向の磁力を測定すると、電流キャリアが一方向に移動するか、反対方向に移動する正の負荷であるかどうかを知ることはできません。
ネガティブな兆候があります。したがって、電流を持つドライバーで動作し、磁場に配置された横方向の磁力を測定すると、電流キャリアが一方向に移動するか、反対方向に移動する正の負荷であるかどうかを知ることはできません。
前の方程式は、ドライバーが垂直である場合にのみ有効です
 。次のように、ベクター形式で最も一般的なケースを表現することが可能です。
。次のように、ベクター形式で最も一般的なケースを表現することが可能です。

であること
ドライバーに沿って電流の方向に向かって指すベクトル(ルート)。この方程式は関係に相当します
 どちらもの定義方程式としてとらえることができます
どちらもの定義方程式としてとらえることができます
ご了承ください
 (図には表されていません)左を指し、磁力を指します
(図には表されていません)左を指し、磁力を指します
 フィギュアの平面を離れることを指してください。
フィギュアの平面を離れることを指してください。
これは、個々の負荷キャリアで機能する力を分析するときに到達したという結論に同意します。
非直線導体 [ 編集します ]
長さのドライバーの微分要素のみが考慮される場合
 、力
、力
 表現によって見つけることができます
表現によって見つけることができます

たとえば、図に示されている形状のワイヤーを考慮してください。 私 そして、それは磁気誘導の均一な磁場にあります
ポイントが示すように、図の平面を残します。各ストレートセクションの力の大きさは、次のように与えられます。

緑色のベクトルで示されているように、ポイントダウンします。長さのワイヤーセグメント
 アーチでは力があります
アーチでは力があります
 その規模は次のとおりです。
その規模は次のとおりです。

その方向は、アーチの中心であるOに向かって放射状です。水平成分は、対応するアークセグメントからOの右側の直接反対のコンポーネントによって解消されるため、その力の下のコンポーネントのみが有効です。その結果、ワイヤの半円の総力が下に向かっています。

次に、総力は次のとおりです。

この力は長さの直線ワイヤーで機能するのと同じであることに注意するのは興味深いです

磁石間の力 [ 編集します ]
当初、それはタイプの式によって天然磁石間の磁力をモデル化することでした。
( a ))

どこ:
-
 それらは、磁石のサイズに依存する「磁気質量」または「磁気負荷」です。
それらは、磁石のサイズに依存する「磁気質量」または「磁気負荷」です。
-
 ポール間の平均距離。
ポール間の平均距離。
-
 それは値の定数です
それは値の定数です

ただし、以前の式は、極を識別し、便利に整列することを可能にする単純な幾何学的形状の磁石を持つ磁石の場合にのみ役立ちます。他の2つのより深刻な問題は、以前のフォームが極の誤った極に簡単に一般化できないこと、および材料の微視的特性から「磁気質量」の値を簡単に計算することも容易ではないことです。
「磁気質量」を計算することの難しさは、とりわけ温度の影響を受けるという事実に反映されます(通常の強磁性材料は、キュリー温度よりも高い温度で自発的な磁化を失います)。これは、磁石の磁気効果は本質的な特性ではなく、材料を内部的に構成する原子と電子の熱攪拌に依存する効果であることを反映しています。
2つの磁石の間の力は、式を通じて同等の電流密度がその内部で知られている場合に正確に計算できます。
( b ))

どこ:
-
 、各磁石の電流密度です。
、各磁石の電流密度です。
-
 、2つの磁石のそれぞれの内部のポイントのディレクターです。
、2つの磁石のそれぞれの内部のポイントのディレクターです。
-
 、2つの磁石が占めるボリュームです。
、2つの磁石が占めるボリュームです。
-
 磁性透過性です。
磁性透過性です。
比較( a )() b )の値がわかります
 それは、2つの磁石の電流の内部分布に非常に複雑な方法で依存します。磁石のサイズと比較して、大きい距離の場合()力が与えられた力( b )2つの磁気双極子の間の力によってアプローチすることができます。
それは、2つの磁石の電流の内部分布に非常に複雑な方法で依存します。磁石のサイズと比較して、大きい距離の場合()力が与えられた力( b )2つの磁気双極子の間の力によってアプローチすることができます。
( c ))
![{displaystyle mathbf {F} (mathbf {r} ,mathbf {m} _{1},mathbf {m} _{2})={dfrac {3mu _{0}}{4pi r^{5}}}left[(mathbf {m} _{1}cdot mathbf {r} )mathbf {m} _{2}+(mathbf {m} _{2}cdot mathbf {r} )mathbf {m} _{1}+(mathbf {m} _{1}cdot mathbf {m} _{2})mathbf {r} -{dfrac {5(mathbf {m} _{1}cdot mathbf {r} )(mathbf {m} _{2}cdot mathbf {r} )}{r^{2}}}mathbf {r} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fb4075ddad9565bc9c8b12c5a59b5f1cb3cdb320)
どこ:
-
 、それらは、南極から磁石の北極までのラインに沿ったベクトルである磁石の磁気双極子モーメントです。
、それらは、南極から磁石の北極までのラインに沿ったベクトルである磁石の磁気双極子モーメントです。
-
 、それらは相対的な位置ベクトルと磁石間の距離です。
、それらは相対的な位置ベクトルと磁石間の距離です。
それらを統合する線と並行して並べられた2つの磁石の場合、この力は次のことが判明しました。

2つの瞬間が並列に整合されている場合
 参照 [ 編集します ]
参照 [ 編集します ]
書誌 [ 編集します ]
- マルセロ・アロンソ、エドワード・J・フィン(1976)。 物理的 。アメリカ間教育基金。 ISBN 84-03-20234-2 。
- リチャード・ファインマン(1974)。 Feynmanは物理学巻2に関する講義を行います (英語で) 。アディソン・ウェスリー・ロングマン。 ISBN 0-201-02115-3 。

Recent Comments