etcs-bremskur vente – ウィキペディアウィキペディア

の計算と監視 ブレーキ曲線 は、ヨーロッパの列車流入型システムの重要な部分ですヨーロッパの列車制御システム( 等。 )。
などの主なタスクは、列車が許容速度を超えないことを保証することであり、可能性のある危険ポイントの前にいつでも保持できるようにすることができます。この目的のために、現在の速度は、ブレーキ曲線で決定される現在の位置について計算された許容速度といつでも比較されます。 [初め] 監視は、ブレーキカーブの群衆で行われます。 [2]
ブレーキカーブの計算は、ブレーキシステムの数学モデル(ブレーキモデル)に基づいています。これは、操作または迅速なブレーキが発生した場合の列車の運動学的挙動を説明し、運用要件を満たしています。 [3] [初め] これに本質的な根拠は、車両に保存された速度依存電流遅延です。これは、ブレーキ性能(ブレーキ数百で表現)またはテストで決定できます。 [4] さらに、ETT車両(EVC)などの計算が進みます。データ、ルートデータ(勾配および接着条件など)、および鉄道インフラストラクチャカンパニーによって指定されたセキュリティ目標。 [5] ETCS駆動許可と匂いからのデータを使用して、距離を動作点(ブレーキポイントなど)まで決定することができ、したがって列車と状況固有のブレーキ曲線を計算できます。 [6]
ETSブレーキ曲線の計算は、ETTSシステムリクエスト仕様の第3章(サブセット026)の第3章で主に説明されています。

ブレーキカーブはすべて、列車の動きのコースを監視するために利用できる曲線です。彼らは速度の速度を形成します。 [3] 立ち経路(停止までブレーキをかけるため)および遅延経路(速度低下のため)を計算できます。 [4]
ガイダンスと監視など、ブレーキの群衆と1つのポイントを使用します。 [5]
- 高速ブレーキシーケンス曲線 [3] ( 緊急ブレーキ減速曲線 、同上)は、監視された場所(SVL)への保証された安全な遅延(AEB)を備えたクイックブレーキによって定義されます。 [5] EBDは、開発されたブレーキ力に従って列車の速度を説明しています。 [3] 安全な遅延にはすべてが含まれています [7] 安全マージンとルートの縦方向の傾向を考慮します。ブレーキ距離のセキュリティという用語の下で要約されている安全マージンは、ブレーキ力、質量、および(特に)公称値の強化の場合の変動を補うのに役立ちます。高速ブレーキは、ブレーキシステムの摩耗の増加につながり、旅行者の快適さを減らすことができます。 [8]
- 高速ブレーキ使用曲線 [3] ( 緊急ブレーキ介入曲線 、EBI)は、追加の上流のブレーキ構造(TEB)を持つEBDに対応します。 [5] EBIを超えると、クイックブレーキが開始され、ブレーキ力が設定されます。 [3] これを行うには、利用可能な場合はメインラインが通気されます。 [7] ブレーキ力が建設された後、同上の列車が続きます。
- オプション 操作ブレーキドラフトカーブ [3] ( サービスブレーキ減速曲線 、SBD)は、完全なブレーキ(遅延ASBを使用)によって定義されます。計算時に安全なブレーキで考慮されない可能性があるため、EBDよりも大きな遅延が発生する可能性があります。 [5]
- オプション 操作ブレーキ操作曲線 [3] ( サービスブレーキ介入曲線 、SBI)ブレーキ構造時間を考慮したSBDに対応します。 [5] 2つのバリアントの間で区別が行われます SBI1 SBDから派生し、同上からSBI2。 [3] ルートと車両がSBIの使用を許可する限り、迅速なブレーキングを避け、通常の停留所の前の停留所で避けるのに役立ちます。 [7]
- Warnkurve [3] ( 警告曲線 、w)は、ドライバーが音響的に警告されていることを超えたときのブレーキ曲線です。 [5] それは、システムによる介入が差し迫っているというドライバーに対する最後の情報として機能します。 [8]
- ソーアカーブ [3] ( 許可された速度 、p)ブレーキ開発なしの目標速度について説明します。 [5] アクティブで ターゲット速度監視 許容される車両とルートの最大速度の最小で、許容速度としてドライバーに表示されている場合。可能であれば、ドライバーが超えてはいけません。 [8]
- 情報 [3] ( 表示曲線 、i)ドライバーがトラクションとブレーキをオフにすることになっている曲線を説明し、速度曲線に従う。 [5] 曲線はでのみ利用可能です ターゲット速度監視 。 [8] とりわけ、運転免許証の協力的な撤退を決定するときに、曲線が使用されます。 [9]
- 表示点 (IP)ブレーキを開始する場所の近似についてドライバーに通知します。 [5] 関数は、ラインアップの照明器具Gに対応します。 [十]
ETCSの仕様によれば、2つのオペレーティングブレーキ曲線(SBI/SBD)の使用はデフォルトで承認されますが、National Value(Q_NVSBTSMPERM)によってインフラストラクチャオペレーターによって抑制される可能性があります。 [11] [12番目] あなたがいない場合、W、P、およびI曲線はEBI曲線に向かって移動し、容量の増加と組み合わされています。 [5] SBI曲線がアクティブである場合、より制限的なものは両方からです 介入曲線 ( 介入の最初の行 、floi)。 SBI曲線が抑制されると、EBIはFLOIとして機能します。警告と曲線は、固定間隔でFLOIの前にあります。 [8]
オプションで、1つ ガイダンス曲線 (GUI)(部分的にはドイツ語 リーダーシップ曲線 [13] )大きなブレーキの遅延を避けることができると定義する。 [8] GUIを使用すると、ドライバーは快適にブレーキをかけ、低い服とエネルギーを節約できます。 [14] たとえば、純粋に電気的に、したがって摩耗することなく実装できるブレーキの遅延を定義することができます。 [15] ドイツで使用されているLZBターゲット曲線に匹敵します。 [初め] あなたの使用は、国家価値(RBC)からのものでなければなりません(RBC) q_nvguiperm )明示的に許可される。 [16] [11] [11] したがって、インフラストラクチャオペレーターは、GUIの可能性のある負の能力効果を防ぐことができます。 [8] それは ガイダンス曲線 アクティブ化されたエンジンガイドは、 許可された速度 との速度 ガイダンス曲線 表示されます。 [17] GUIの計算は、比較的自由に定義可能です 通常のサービスブレーキ 基礎として。 GUIを計算する際には、長期も考慮されます。 [8]
その機能などに応じて、ブレーキ曲線に従うことができます 曲線 (P、GUI、SBD、EBD)、 介入曲線 (SBI、ebi)および 情報曲線 (i、w)分割。 [18]
それらの [ 編集 | ソーステキストを編集します ]
運転が操作された(ATO)自動化(ATO)の場合、アクセス可能な運転曲線は緊急ブレーキ曲線の近くにあり、他のすべての操作ブレーキ曲線は分配されます。 [19] ドラフトとして利用可能なATO要件仕様は、ATO車両デバイスが使用していることを規定しています 監視された速度エンベロープ管理 (SSEM)などからのブレーキ介入を避けます。目標速度またはリリース速度監視がある場合、これらを超えてはなりません。ターゲット速度モニタリングの場合、強制ブレーキ操作曲線(EBI)のコンプライアンスのみが決定的です。ターゲット曲線(P)と警告曲線(W)が抑制されるときの警告トーンが抑制されます。 [20]
影響要因 [ 編集 | ソーステキストを編集します ]
次のデータは、ブレーキ曲線の計算に含まれています:速度制限、縦方向の傾斜、ブレーキ豆ゾーン、無力なセクション、接着の減少、速度、距離の仕様、および国家価値。 [21] 制限の一部は、トラック状態を介して送信されます。
縦方向の傾向は、EBD、SBD、およびGUIの計算に含まれます。 [22] それは遅延値としてです( a_gradient )モデル化されているため、0.01 m/s²未満の勾配が1000あたりの追加遅延がありますが、ブレーキ遅延の勾配は1000あたり0.01 m/S²未満減少します。列車の回転質量が大きいほど、遅延への影響は低くなります。 [23]
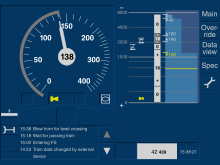
ドライバーの部屋のディスプレイ(ドライバーマシンインターフェイス、DMI)では、ドライバーはいつでも許容速度で表示されます。
より低い速度への変更が行われない限り、車両は 天井速度監視 (CSM)。などは、許容速度へのコンプライアンスのみを監視します。ターゲットブレーキは必要ありません。より低い速度または停止でターゲットブレーキをかけることが必要な場合、これは ターゲット速度監視 (TSM)Aktiv。 [24] 音響的にも視覚的にも、ドライバーは必要な今後のブレーキングに惹かれます。速度計の針は黄色になり、垂直バーはターゲットポイントまでの距離を示し、スピードメーター組織の黄色の円形セグメントは後の間の距離に及びます 表示曲線 許容速度と目標速度。
-

スケジュールされた、妨げられていない旅行中のタクラセ(天井速度監視)。 160 km/hの許容速度では、現在148 km/hが駆動されています。ブレーキカーブの監視はアクティブではありません。
-

ブレーキカーブ内のブレーキ中の速度計ディスク(ターゲット速度監視)。 930 mで到達する必要がある目標速度は60 km/hです。
-

許容速度を超えたときの速度計プレート(許容速度)。 160 km/hの許容速度では、現在167 km/hが駆動されています。
-

介入速度を超えたときのスピードメーターディスク(許容される160 km/hの代わりに174)。強制ブレーキ介入が実施されました。
などは、いくつかのブレーキターゲットポイントを管理できます。最も関連性の高いターゲットポイント(「最も関連性の高い表示ターゲット」、MRDT)のみがドライバーに表示されます。 [25] [26]
インフラストラクチャオペレーターによって決定される11の国家価値は、ブレーキ曲線計算に影響します [27] 国から国へと導いて、それ以外の場合は同じ境界条件で曲線をブレーキをかけます。
これまでのところ、公開されていない方法ではなく、国から国への安全なブレーキ遅延を決定するために使用されてきましたが、これらは等に均一に決定する必要があります。適切な標準化されたアプローチは、国際鉄道協会(UIC)の専門家グループで開発されました。パラメーターに基づく個々のパラメーターの定義には、さまざまな専門家によって異なる方法で解釈される解釈の自由がまだあります。 [28]
などは、2つの段階でクイックブレーキ使用曲線をモデル化しました。
- として 同等のブレーキ開発時間 [4] 説明されているブレーキの構築時間は、クイックまたはフルブレーキのトリガーから始まります。このフェーズでは、ブレーキ効果はゼロです。最大ブレーキング力の95%が構築された瞬間に終了します。 (引張力のシャットダウンの時間は考慮されていません。これは、ブレーキが開始される前に落ちます。 [4] ))
- その後のブレーキ時間は、最大のブレーキ力に基づいています。速度に応じて、ブレーキ遅延のステップ関数としてモデル化されています。
ETSブレーキモデルは、完全に構築されたブレーキ力のある別の位相なしで単純化されますが、ブレーキ力の実際の構造は連続的に実行されます。
ブレーキ曲線などを計算するには、列車の名目ブレーキ能力に関する知識が必要です。これは現在、主にブレーキ数百で説明されています。 [初め] ETCSブレーキ曲線の決定は、UICリーフレット544-1で説明されています。 UICブレーキモデル(ブレーキ100番目)または実験に従って行うことができます。などでは、これらのアプローチは変換モデルまたはガンマモデルと呼ばれます。どちらの方法もリーフレットで説明されています。 [4] 車両オペレーターは、基本的にどのブレーキカーブが計算されるかを決定できます。部分的には何百ものブレーキのセレクションです [29] または移動します [29] [30] [最初に30] 必要。
十分なセキュリティを確保するために、ルートは列車補正係数とブレーキ曲線計算のオプション機能の放出に送信されます。 [初め] 車両の補正係数とインフラストラクチャの補正係数との間に区別があります。車両の修正要因は鉄道交通会社によって定義され、責任がありますが、インフラストラクチャのものは定義され、鉄道インフラストラクチャカンパニーによるインフラストラクチャの責任があり、インフラストラクチャによって車両に送信されます。 [32]
対応する安全マージンは、インフラストラクチャカンパニーによってグローバルに定義されるか、2つの補正係数を介して緊張して定義できます。 [初め]
変換モデル [ 編集 | ソーステキストを編集します ]
UICによって開発されたものと 変換モデル (また ERTMS/などのUICの一般的なブレーキモデル [4] )ETCSが必要とする100分の1に変換することができます。 [初め] それもそうです ラムダモデル ブレーキの100分の1のために立っているラムダ式の標識に従って説明されています。 [初め]
レベルのドライレールでのターゲット速度でのブレーキ出力速度からの速度低下に必要なパスが計算されます。 [4] [33] また、カバーされた安全マージンは、ブレーキシステムの一部の故障の可能性が少ないほど含まれていません。 [33] [4] ブレーキ数百、列車のジャンル(旅行または貨物列車)に加えて、トラクターとブレーキング(GまたはP)が含まれています。 [4]
モデルはチェックされ、最大900 mの長さの乗客または最大1500 mの長さの貨物列車で適用されます。最大220 km/h、最大±8%、30〜250のブレーキ100分の1の縦方向の傾向に適用されます。 [4]
モデルによって提供される接着値と遅延値は、実験の中間値に対応しています。
モデルによって提供される現在の遅延は、必ずしも列車や個々の車両の実際の物理的特性を反映しているわけではありません。したがって、事前定義されたブレーキ開発期間とともに、停止ルートの安全な計算を保証するのは理論的なサイズです。 [4]
実際に実現されたブレーキパスの統計的広がりは、国家価値として伝達される補正因子で対抗されます。それらは、リスク分析とそれぞれのシステムのセキュリティ目標に基づいています。 [4]
変換モデルのブレーキ位置Pのパーソナルトレインのブレーキ構造は、少なくとも5.0秒であり、国家価値として送信される補正係数で使用されます kt_int 乗算。 [34] ドイツのレベル2領域では1.15の値が通常であり、少なくとも5.77秒のブレーキ時間は結果です。さて、乗客輸送を生き抜くと、ブレーキ構造は多くの場合1秒から2秒の間で、実際に必要よりも約4秒早くブレーキをかけ始める必要があります。
ガンマモデル [ 編集 | ソーステキストを編集します ]
ガンマモデルを使用すると、ブレーキ容量はブレーキの遅延とブレーキ時間を介して直接定義されます。ブレーキからの変換は数百のように 変換モデル 、もう必要ありません。 [初め] ガンマはフランス語の遅れを表しています。 [初め]
安全なブレーキ遅延 a_brake_safe ガンマモデルの名目上のクイックブレーキ遅延になります a_brake_emergency 、ドライレールとウェットレールの補正係数を掛けます。 [35] ブレーキ出力は、さまざまなブレーキ速度からの運転テストと異なる条件下でのUIC通知シート544-1に基づいて決定されます。これらには含まれます乾燥レールと摩擦、可能な限り直接距離、平らなルート、定義された荷重状態。 [4] 車両メーカーは、これらの安全因子を計算する責任があります。 [28]
最大7つの遅延レベルを定義できます。 [4]
証明要因 [ 編集 | ソーステキストを編集します ]
ドライレール用 [ 編集 | ソーステキストを編集します ]
補正係数 kdry_rst 車両がドライレールの指定された保証ブレーキ遅延に到達することが保証されています。 [初め] この因子は、通常の条件下での列車の遅延からの可能な車両関連の偏差を説明しています(ドライレール)。 [初め] [28] 補正係数は、ブレーキ容量の車両側の変動を示し、公称クイックブレーキ遅延とともに使用されます a_brake_emergency 乗算。
補正係数は、速度、ブレーキシステムの特性、およびルートで必要な信頼のレベル(M_NVEBCL)に依存します。 [35] [初め] すべての速度レベルと信頼レベル(EBCL)を対象とする必要があります。 [初め] 要因は、速度とルートで指定された信頼のレベル後に区別できます。 [36]
ということは、名目条件からの逸脱が予想されないことを意味します。 [28]
 ということは、名目条件からの逸脱が予想されないことを意味します。 [28]
ということは、名目条件からの逸脱が予想されないことを意味します。 [28] kdry_rst計算の標準化された手順はありません。車両メーカーは、さまざまなレベルの信頼の値を決定できる限り、基本的にパラメーターを決定するための無料選択を持っています。 [初め] UICワーキンググループB126.15によって可能な手順が提案されました。 [初め]
原則として、技術システムの故障行動を説明するための一般的な数値手順としてのモンテカルロ法が使用されます。 [28] 鉄道車両のブレーキシステムに適用されると、ブレーキ関連特性の静的分布とブレーキングへの影響について説明できます。 2006年にUICによって提案され、2010年からERAに受け入れられています。 [37] すべてのブレーキ関連パラメーターと機能をマッピングすることを目的とした、それぞれのブレーキシステムのアーキテクチャモデルで、シミュレートされたブレーキの形で非常に多数の同様のランダム実験が実行されます。
システム全体のブレーキのパフォーマンスに影響を与えるさまざまな要因がモデル化されており、確率と統計的分布が強調されています。個々のコンポーネントに加えて、ブレーキシステムのアーキテクチャもモデル化する必要があります。 [28] モンテカルロシミュレーションの一部として、多く(
)調べるブレーキシステムのさまざまな条件をシミュレートし、その結果として生じる名目ブレーキ能力からの偏差が調べます。結果の統計分布から、補正因子kdry_rstは、さまざまなレベルの信頼に対して決定されます。 [初め]
 )調べるブレーキシステムのさまざまな条件をシミュレートし、その結果として生じる名目ブレーキ能力からの偏差が調べます。結果の統計分布から、補正因子kdry_rstは、さまざまなレベルの信頼に対して決定されます。 [初め]
)調べるブレーキシステムのさまざまな条件をシミュレートし、その結果として生じる名目ブレーキ能力からの偏差が調べます。結果の統計分布から、補正因子kdry_rstは、さまざまなレベルの信頼に対して決定されます。 [初め] | 土地 | EBCL値 |
|---|---|
| ベルギー | 7(従来のネットワークでの完全な監督) [38] (99,99999%) (以前は9 [39] / 99,999999%) |
| ドイツ | 1(レベル1 LS) [40] (90%) 7(レベル2) [40] (99,99999%) |
| フィンランド | 8 [41] (99,99999%) |
| ルクセンブルク | 9 [42] (99,999999%) |
| ニューサウスウェールズ州 | 9 [43] [44] (99,999999%) |
| ノルウェー | 8 [45] (99,99999%) |
| ポーランド | 9(レベル1 LS) [46] (99,999999%) |
| スイス | 1(レベル1 LS) [47] (90%) 5(レベル2) [47] (99,999%) |
| チェコ共和国 | まだ定義されていません [48] |
ルートによって観察される信頼のレベル( 緊急ブレーキ信頼レベル 、 EBCL )危険ポイントを超える許容確率について説明します。 [初め] パラメーター m_nvebcl インフラストラクチャで決定され、ルートから車両に転送されます。 [28] それは、ドライスプリントで車両が安全なブレーキ遅延に到達する可能性を説明しています。 [28] たとえば、値への影響は、列車の車/ユニットの数、ブレーキの制御(ロータリーフレームまたはワゴン選択)、トラクションシャットダウンの故障の可能性、またはブレーキパッドの品質(摩擦摩擦値の低下につながるバッチエラーの証明性)を持つことができます。 [28] ETSの仕様に応じたデフォルト値は9(99.999999%)です。 [11] このセキュリティ目標を使用すると、安全なブレーキ遅延では10億ブレーキの1つの1つだけが達成できないため、危険ポイントを超えています。
典型的 kdry_rst – オランダのドライブ車両の値は0.70(EBCL 8で最悪の場合)から0.88(EBCL 4で最高のケース)です。 [49] 423シリーズの場合、0.694(EBCL 7)または0.89(EBCL 3)の予備値が記載されています。 [50]
一部の車両オペレーターは、トラクター後の複数のトラクションのKDRY_RST値を区別して、運用パフォーマンスを向上させます。 [29] [30] たとえば、Digital Knot StuttgartのTalent 3は、単純な3パーターの場合は0.7(EBCL 7)ですが、15のディバイダーは0.9です。 [51] いくつかの重要なコンポーネントが同時に故障する可能性は、単一の障害の可能性がすでに低いよりもはるかに低いため、より長い列車はより大きなKDRY_RST値を達成します。列車が長くなればなるほど、単一の障害が迅速なブレーキ遅延またはブレーキ距離に影響することが少なくなります。
ETS仕様では、kdry_rst値の精度に関する記述はありません。因子の精度は部分的に要件です。 [29] 個々のなどはkdry_rstの値を完全に0.05に締めくくりますが、他の値は値を0.001に正確にマッピングできます。
(新しい)鉄道車両のブレーキシステムは、特に高いKDRY_RST値とブレーキの遅延の要件に特に最適化できます [29] 特定のEBCLの下に置かれます。
ウェットレール用 [ 編集 | ソーステキストを編集します ]
補正係数 ket_rst 実際には1つ未満のウェットレールの安全係数について説明しており、スライド保護の試みをブレーキすることが決定されています。彼は、接着条件が不十分な状態でブレーキ遅延がどのように減少するかを説明しています。 [初め]
摩擦値に対する水分の影響によるブレーキの損失は、テストテストによって決定されます。 [4] これらは、標準EN 15595に従って行われます。 [18] [52]
の値が大きい m_nvadah 、ブレーキパスが短くなります。 [53]
DBネットワークの領域では、値は m_nvavadh KWET_RSTから生じる安全レベルが定量化できないため、1に設定します。 [52] これは、ドライレールとウェットレールの安全なクイックブレーキ遅延が同一であることを意味します。スタンスの摩擦が減少した地域の列車の旅に別の規定が適用されます。とりわけ、ドライバーは速度と運転スタイルを鉄道の状態に適応させ、拘留を減らしてエリアを報告する必要があります。 [18]
早期などのブレーキ曲線 [ 編集 | ソーステキストを編集します ]
1994年にそれを置いた 欧州鉄道研究所 ブレーキ遅延による高速列車の均一なブレーキ評価の提案(ブレーキ数百とブレーキウェイトの代わりに)。 [54] これにより、後のガンマモデルの基礎が築かれました。
1996年に提示されたETCS仕様のバージョン3.01は、7つの曲線で構成されるブレーキカーブモデルを提供しました。 緊急ブレーキ介入曲線 、 一 サービスブレーキ介入曲線 、 一 警告曲線 、 一 許可された曲線 、 一 トラクションカットオフカーブ 、 一 予測曲線 と同様に 運動機関の要求曲線 。 4つの関数は現在の関数に対応していますが、 予測曲線 ドライバーにブレーキまたはサポートを依頼するために、ドライバーの制御に基づいて、「近い将来」の列車の速度と位置を計算します。いつ 運動機関の要求曲線 列車が新しい運動機関を要求する必要があります。縦方向の傾斜と放出速度の考慮も、ETS仕様にも含まれていました。いつ トラクションカットオフカーブ トラクションは、ETCによってオフになります。 [55]
いくつかの特別なブレーキ曲線が、1998年の予備規定に従って装備され、2002年4月に運営されたスイスなど、スイスなどのパイロットルートZofingen-Sempachでプログラムされました。 [56]
無線列車の影響 [ 編集 | ソーステキストを編集します ]
ラジオプルの影響力(FZB)の最初はコロン – ライン/メインエクスプレストラックルートを目的としています 鉄道車両および機械鉄道システムのための研究所 ハノーバー大学(ISB)と ブレイキングオペレーション、規制、ブレーキングパワージェネレーション (BT 21)1990年代の終わりにミンデンにあるドイツ・バーンの研究・テクノロジー・センター(DB)が新しいブレーキ曲線を設計しました。 [57]
ラインの影響(LZB)に使用されるブレーキ曲線とは対照的に、ブレーキの遅延は、ブレーキ距離全体にわたって一定であると想定されなくなります。縦方向を考慮に入れる必要があります。摩耗が少なくなり、フィードバックを増やしてブレーキをかけ、ターゲットと監視速度の間の不必要に大きな距離を回避する必要があります。 [57] 新しいブレーキ曲線は、現在の遅延の速度依存関数としてモデル化されており、異なる速度範囲のさまざまな遅延値を与えることができます。さらに、ルートの傾斜は実際には考慮されていたため、勾配セクションにはブレーキパスが短縮されました。これに基づいて、FZB操作のために6つのブレーキ曲線の群衆が形成されました。 [58] [57]
- 高速ブレーキ使用曲線 ( 緊急ブレーキ介入曲線 、 ebic )クイックブレーキをトリガーする必要があります。必要なブレーキパスセキュリティを考慮して、列車のクイックブレーキ容量からのブレーキ力の開発段階を考慮して形成する必要があります。 [58] 彼女は、安全性に関連するものであるために意図されたブレーキ曲線の唯一の1つでした。 監視された場所 (SL)スリップパスの終わりで終了します。これは、運転免許証の最後にある他のすべてのブレーキ曲線( 権威の終わり 、eoa)ベースを持っています。 [57]
- フルブレーキカーブ ( [フル]サービスブレーキ介入曲線 、 SBIC )EBICのキックオフを防ぐために、ドライバーがまだ開始していない場合は、自動的にブレーキをかける必要があります。計算では、完全なブレーキ遅延には、ブレーキ開発期間が完全に含まれる必要があります。 EBICから十分な距離に達していない場合、これを達成するために、それに応じて曲線を延期する必要があります。 [58] これにより、快適さと摩耗の理由で磁気レールブレーキの使用を避ける必要があります。 [57]
- シャットダウンするための曲線 ( トラクションカットオフカーブ 、 TCO )SBICに到達したときに牽引の自由を確保するために、緊張力の自由を確実にするために、引張力を良い時期に切り替える必要があります。 TCOは、各ポイントのトラクションシャットダウンに必要な方法を置くために、SBICによってSBICから派生する必要があります。 [58]
- サンブレーキバスケット ( 許可された曲線 、 あたり )ブレーキプロセスの通常のプロセスを提供する必要があり、ドライバーはターゲット速度として表示されます。以前は、ブレーキパワーがセットアップされた後、以前に発表されたブレーキがこの曲線に沿って行われるべきでした。定義された電流遅延は、計算に基づいている必要があります。 [58]
- Warnkurve ( 警告曲線 、 wrn )EBICのキックオフを防ぐために完全なブレーキを開始するために、光学的かつアコースティックなリクエストをトリガーする必要があります。それは事前に自由に定義できる時間にあるべきです サンブレーキバスケット 台。 SBICの前にフルブレーキを開始するのに十分な応答時間をドライバーに与えるために、WRNとSBICの間に十分な警告時間があるはずです。これが事実でなかった場合、それに応じてWRRとそれに結合したものを移動する必要があります。 [58] [57]
- アドバンスカーブ ( 指定前曲線 、 写真 )今後のブレーキングの光学的かつ音響発表として機能する必要があります。これを行うには、時間定数でPerから派生する必要があります。 [58] 縦方向の傾向も考慮する必要があります。 [57]
ブレーキ曲線は、1998年春にICE Vで実際的な可能性を確認しました。彼らはドライバーにとってモバイルであることが証明されています。 [58] とりわけ、ブレーキカーブ間のさまざまな時間距離がテストされました。 PICとPERの間の8秒の時間差が推奨されました。 [57] 必要な車両固有のデータをセットアップするために、DBでの対応する新しいブレーキ評価手順が1990年代の終わりに作業中でした。 [57]
Cologne-Rhein/Main Expressトラックには、ETT仕様のETS仕様のETS仕様の予測可能な遅延により、さらに開発されたLZB(LZB L72 CE-II)が最終的に装備されていました。 [59] 最終的に、FZBブレーキ曲線モデルの作業は、ETCの決定的な根拠を形成しました。
さらに開発されたLZBブレーキ曲線は、1997年のETCSの曲線と比較されました。 ETCSブレーキ曲線は、LZBブレーキ曲線を一貫して超えていませんでした。 [60]
ベースラインの不十分なブレーキ曲線2 [ 編集 | ソーステキストを編集します ]
ベースライン2のブレーキ曲線の定義は、2000年代後半にはまだ模倣されすぎていました。 [六十一] ベースライン2のブレーキ曲線の不十分な考慮事項は、左インフラストラクチャと車両オペレーターの範囲の範囲を削減します。これにより、TSIとは異なる多くの特別なソリューションが発生しました。 [62] 個々のルートごとに、それぞれのインフラストラクチャオペレーターの安全マージンが車両デバイスに保存されました。これらの値をエアインターフェイスを介して送信することを意図していませんでした。 [33]
ベースライン2(SRS 2.3.0を含む)までのブレーキカーブの計算は、容量とブレーキブレーキコースの鉄道の期待を満たすことができませんでした。対応するブレーキ曲線は実用的であるとは見なされませんでした。 SRS 2.3.0には、保証された均一なブレーキ曲線計算はまだ含まれておらず、以前の列車に影響を与えるシステムと比較して、ルートパフォーマンスに強い制限をもたらすいくつかの要件が含まれていました。ドライバーには「快適すぎ」が与えられました。 [8]
ベースライン-3ブレーキ曲線の開発 [ 編集 | ソーステキストを編集します ]
ベースライン2ブレーキ曲線の欠点により、ワーキンググループ(B126.5)が設定されました。これは、最初はERRIにあり、その後UICに位置し、ERTMSユーザーグループと緊密に連携しました。ブレーキ曲線を最適化するために、トレーニングとシミュレーターのテストが実施されました。 2005年秋、パーンドルフとズルンドルフの間のETSパイロットルートの最適化されたブレーキ曲線は、旅行と貨物列車で運転されました。ドライバーはターゲット速度(許容速度)を外すことができ、予期しない強制ブレーキインサートは表示されませんでした。 [8]
2001年頃、変換モデルの作業が開始されました。数学モデルは、当初、理論的基礎について開発され、実際のブレーキ試みの結果に基づいて調整および改良されました。これにより、ドキュメント97E881の根本的な改訂が行われました。 制御プロセスを変更します ERAが導入されました。 [33]
2006年の終わりには、新しいブレーキカーベットの定義には3つのオープンポイントがあり、2007年秋にはシミュレーターの試行がまだ行われるはずです。その結果、彼らはETCSブレーキ曲線の最終的な仕様を受け取りたいと考えていました。ドライバーの「快適さ」は最小限に抑えられました。変更されていない安全性に関連するブレーキカーブ(EBI/EBD)が発生した場合、上流の非セーフティ関連曲線が変更されました。ベースライン2ブレーキ曲線と比較して、警告と介入曲線の間の距離は、合理的な会社に減少しました。警告曲線が走った後、ブレーキを開始することによって介入(floi)が防止された可能性があるという最初のアプローチは、警告と介入曲線の間の距離と結果として生じるルート容量の減少のために拒否されました。代わりに、ドライバーは、ブレーキを急速に増加させることによってすでに開始されているブレーキを強化する可能性があることのみを与えられます。 [8]
たとえば、SRS 2.2によると、132秒のブレーキ時間が、200 km/hから1ミルあたり6分の6のブレーキ100分の1を備えた旅客列車で、停止(SBIなし、50 mからスリップ)を計画した場合、この値は82秒に減少する可能性があります。 [8]
2006年、今日に使用されていたブレーキ曲線に加えて(EBD、SBD、EBI、SBI、WARN-、SOLLSKURVE、およびガイダンスカーブ) 引張力をオフにするための曲線 ( トラクションカットオフカーブ 、TCO)計画。 TCOで、それを超えると Warnkurve トラクションはなどによってオフにすることができます。これにより、列車が短いスリップパスまたはゼロスリップパス(EOAとSVLの距離)で停止することを余儀なくされるのを防ぐ必要があります。曲線に加えて、1つもありました ブレーキ通知 ( 事前兆候 )。これにより、ドライバーに、ターゲットポイントを達成するためにブレーキを開始する必要があるルートのセクションに近づくことを通知する必要があります。これはからの変更に関連していました 天井速度監視 の中に ターゲット速度監視 。 [8]
ベースライン3で 変換モデル UICが導入され、ブレーキ曲線アルゴリズムは、ベースライン2よりも大きなルートパフォーマンスを実現するために改訂されました。 [初め]
ドキュメント97E881のバージョン7Aの内容は、2008年12月に公開された最初のベースライン-3仕様(SRS 3.0.0)のドラフトに入りました。 [33]
以前のETCSブレーキモデルの容量削減効果は、ベースライン3のブレーキモデルを使用して削減されます。 [63]
さらなる開発 [ 編集 | ソーステキストを編集します ]

LGV Sud -est(Paris-Lyon)のETS-L2機器のシミュレーションの場合、エンジンガイドへの頻繁な参照を使用して、誘導前に非常に頻繁に到達しました。列車の速度は、登山セクションの許容速度を大幅に下回っていました。これにより、誘導前と適応症の間の楽しい時間が生じ、通常は更新された運転免許証が送信され、列車がターゲット速度監視に入らなかったようになりました。他の車線も不必要な障害を報告しました。 [六十四] ベースライン3 MR1(SRS 3.4.0)からベースライン3リリース2(SRS 3.6.0)への移行により 指定前の場所 したがって、省略します。 [65] の同意 鉄道の相互運用性および安全委員会 SRS 3.5.0では、バージョン3.5.0にまだ含まれる前指定が省略されました。 [66] ベースライン3のリリース2では、リリース1と比較した事前発表時間が体系的に短縮されました。 [六十七]
2020年の初めに、国際鉄道協会はIRS 50544-3を発表しました。 Lambdaブレーキモデルなどを使用する列車のクイックブレーキバルブの要件を定義します。このブレーキモデルのブレーキ開発時間は、Knorr-BremseによるFührerbremsmodellD2を使用して以前に決定されました。新しい標準ドキュメントは、他のブレーキバルブを使用するときにETCSブレーキパスも観察されるように、要件とテスト方法を定義します。 [68]
見通し [ 編集 | ソーステキストを編集します ]
ETCのセキュリティマージンの標準化は、UICワーキンググループB126.15(2006年現在)の一部として使用されます。さらに、u。受け入れられているセキュリティ目標の。それまでは、セキュリティマージンを国家修正俳優としてマッピングする必要があります。 [8]
欧州鉄道機関の場合、ETCSブレーキカーブモデルのさらなる開発は、さらに最適化し、企業と安全の側面を評価することにより、ETCの潜在的な「ゲームチェンジャー」です。さまざまな最適化の提案が利用可能です。 (2015年現在) [69]
スイス連邦輸送局は、ETCSなどの容量目標(2019年現在)を達成するために、Brake Curvesなどの行動の必要性を見ています。 [70]
電流などの改善の可能性(ベースライン3 m2)は、速度のしきい値でブレーキをかけると、縦方向の傾向を変更するときに列車の下で見られます。 [50] [71] [30]
また、ブレーキカーブの計算で既にブレーキ列車がある将来の現在のブレーキの遅延を考慮することも提案されています。これはブレーキパスの短縮につながるわけではありませんが、ドライバーまたはATOのブレーキプロセス中の規制の範囲を増加させます。 [72]
ガンマモデル内で最適化するために、FREATおよびブレーキモーメント(カバー、摩擦値)の終わりに感度分析が提案されており、操作における力の終了の観察とブレーキモーメントの散乱を特定するための物理摩擦モデルの使用に基づいて、入力パラメーターの仮定が改善されます。 [七十三]
CENワーキンググループは、kdry_rst値を決定するためにユーロ形式で動作します。 [74] [52]
異なるなどのバージョン、ブレーキモデル、ATO機器のある列車の容量消費量は、大幅に異なる場合があります。 [六十七]
などのブレーキ曲線は、それぞれの境界条件に最適化された以前の全国列車ベースに影響を与えるブレーキ曲線よりも、より制限的(フラット)になる可能性があります。これらの場合、それらはより長いタイシーケンスにつながり、したがって容量が少なくなります。 [7] [75] ブレーキカーブモニタリングを提供しないEursignumなどの列車の影響を与えるシステムと比較して、「保留」に対する容認できない旅行の監視や速度監視などは、ブレーキカーブモニタリングで安全性の利点を提供します。 [76] オーストリアなど、さまざまな前列距離を持つ国では、柔軟なブレーキ曲線がメイン信号までの実際の距離を考慮に入れる可能性を備えたブレーキ曲線で、硬いブレーキ曲線を備えた従来の列車ベースシステムと比較してより大きな安全性を提供します。 [77] などへの変換には、多くの場合、ブレーキ曲線と容量の制限が伴います。
LZB(ICE 3の場合)、TVM(TGVの場合)、およびETC(TGVの場合)のブレーキ曲線の比較は、LZBおよびTVMのブレーキ曲線よりもやや平らなブレーキ曲線を示しました。 [78] ルクセンブルクなどにETCを導入する場合、ブレーキカーブは、従来の主要技術およびセキュリティテクノロジーのそれよりも一貫して平らであることが判明しました。これにより、追加のインフィル禁止が敷設されました。 [79]
ETSブレーキカーブモデルでは、障害のない旅、したがってパフォーマンスの兆候は決定的です。 [80] 近づいている時間は、ETCS会社で表示ポイントで始まります。 [33] これは固定前のシグナル距離の代わりになり、引張およびインフラストラクチャ固有です。 [80] [81] ブレーキ曲線のコースは、車両に設置されたブレーキの性能に依存します。パフォーマンスが低下すると、ブレーキカーブが平坦になり、ブレーキインサートを早く作成する必要があります。 [3] これは、レベルの交差や腐敗警告システムなどの時間依存ルート要素を計画する際に考慮する必要があります。 [18] たとえば、ドイツにETCの導入を行うと、運転免許証をタイムリーに延長するためにブレーキ距離を確保するために、最長の列車に基づいて、信号覆われたレベルの交差のスイッチを転送する必要があります(レベルの交差を確保した後)。これは、強制ブレーキなしで列車をグリップに持ち込むために、列車が邪魔されている場合、ブレーキの不十分なブレーキ列車のドライバーが十分な応答時間を確保する唯一の方法です。ブロッキング時間を最適化するために、レベル交差セキュリティシステムの直接制御がETCによって提案され、鉄道の接点は再発レベルとして提案されています。 [82]
スイスでは、ETCの導入により、追加の安全保護区でドライバーが負担する決定とリスクを引き受けるために、ブレーキカーブが平坦になりました。 [83] 従来の外部シグナル伝達をETCSレベル2操作に変換することにより、保存されたブレーキ曲線のたっぷりの安全追加料金とその後の予約された運転スタイルにより、利用可能なルートの数は約10%減少しました。 [84] SIL-4プルーフモニタリングに払われている連続フラットブレーキ曲線のために、ETCSレベル2が期待していた容量性の改善は発生しませんでした。 [85] Giubiasco(スイス)でETCSセクションを委託するとき、GradientのESTエントリのエリアの貨物列車の速度は、2018年5月末に下げる必要がありました。これは、セキュリティマージンが大きいためです。 [八十六] スイスの機関車の指導者と候補者の協会は、ETCSレベル2の緊張期間が光学的外部信号と比較して拡張され、自動化された運転操作(ATO)およびETCSレベル3がより短いタイシーケンスを達成するために必要であると批判しています。 [八十七]
ETCSレベル1リミテッドの監督(ベースライン3)で動作しているため、以前のZUBシステムと比較して、2020年の初めからスイスで移動時間の延長が観察されました。たとえば、Zub操作では「解放」と40 km/hの前進の旅が可能でした。たとえば、「ドライブ」で「停止」する場合、Balisenが主な信号で制限を解消できるようになるまで、会社では15 km/hのみが許可されます(Euroloopがない限り)。鈍いトラックの場合、バンパーの和解は、さらなる許容範囲なしで15 km/hに監視されます。 SBBは「約20秒の」時間の損失について話しましたが、従業員は最大30秒について話しました。 [88] [89] SBBはまた、列車の運転手がより保守的であるため、旅行時間の延長も観察します。彼らは、システムによって過剰に処理されないように早くブレーキをかけました。 [90] 独自の声明によると、同社は改善に取り組んでいます。 [88] SBBは、2025年までに容量損失を再制定できると予想しています。スイスの旅行ドライバー協会の会長は、以前に削減された鉄道駅の着信速度を批判し、ETCの代替品を求めています。 [91]
Signiveの場合、ルートの補正係数が選択され、これがPZBブレーキ曲線を再現し、ルートの移動時間と容量がPZBの移動時間と容量に対応するようにしました。 [92] 車両固有のクイックブレーキ使用曲線は、「PZBモニタリング曲線をできるだけ(下で)近く(以下)実行する必要があります」。 [93] ネットワークアクセスには対応する要件があります。 [九十四]
ETCSエントランスは、2つの参加列車に影響を与えるシステムの異なるブレーキ曲線のために強制的なブレーキを避けるために、ブレーキ(結び目など)が定期的にブレーキされている領域では避ける必要があります。 [95] [96] 特にノードでは、エントリとフォローアップ信号の間の最小距離を常に保証することはできません。これにより、不要なブレーキカーブジャンプにつながる可能性があります。 [97] たとえば、レベルやファッションの変化や国家価値の変化により、ブレーキカーブジャンプが発生する可能性があります。 [98] [99] ETCSブレーキカーブが従来の列車の影響と次の信号「停止」のそれよりも平らな場合、などを入力するときにブレーキカーブジャンプも発生する可能性があります。
速度を下げる必要があるポイントの前に、「交通渋滞」効果、つまりH.より長い移動時間が来ます。ブレーキ距離の長さは、速度しきい値の面積のより高い元の速度から派生します。ただし、このブレーキ距離を実際に駆動するためには、一定の(より高い)速度で継続した場合よりも低速までのブレーキングにより、列車は大幅に多くの時間を必要とします。速度の低下が大きいほど、占有率が大きくなります。効果を補うために、引張配列セクションを短縮できます。 [100]
ガンマモデルを使用する場合、ブレーキシステムの最適化は、たとえばブレーキの最適化された制御により、シーケンスシーケンス時間の短縮につながる可能性があり、単一の車またはボギーのブレーキの故障の可能性が減少します。 [28]
S-Bahn StuttgartでのETCの導入の検査では、SRS 3.6.0(誘導前ブレーキカーブなし)に従って、ドライブ車両のETT機器のガンマブレーキモデルと自動運転(ATO)を推奨して、可能な限り最大のパフォーマンスを実現します。既に変換モデルでは、60 km/h 14秒からのブレーキインサートは、従来のKSシグナル伝達(運転免許証の終了前に43秒ではなく、和解時間29秒の開始)よりも遅れて作成する必要があります。ドライバーのトレーニングと経験、およびATOの使用を通じて、ブレーキの使用も遅れることができ、パフォーマンスをさらに向上させることができます。それにもかかわらず、フラットブレーキ曲線は、プラットフォームの最後にある「ホールド」信号で、追加のブロックナンバープレートの「出口信号」から最大100 mの短い距離で推奨されます。 [101] ETS検査では、Brake Curvesは、Gammamモデルに必要なすべてのデータがまだ利用できるわけではないため、ブレーキの数百枚で控えめにモデル化されました。 [30] 2020年の初めに、S-Bahnラインの最小列車時間の最適化などのブレーキ曲線の可能性は、約10秒で推定されました。 [102] さらに、後のブレーキポイントのために、少し短い移動時間が予想されます。 [最初に30] さらに、新しい車両での作動ブレーキをより良くすると、さらに後のブレーキポイントにつながる可能性があります。 [30] 2022年に発行された同様の列車の長さと運転のダイナミクスの2つの比較によると、その容量消費量など。ブレーキカーブやその他の「デジタル」最適化により、2倍です。 [103]
メインルートウィーンでのETCの導入の調査中に、従来の主要なテクノロジーおよびセキュリティ技術と比較して、緊張時間の延長がありました。 [104]
ガイダンス曲線はブレーキの摩耗を減らしますが、移動時間が長くなり、インフラストラクチャのパフォーマンスが低下します。 [15] DKS(1000あたり25で0.5 m/s²のガイダンス曲線)に公開された極端な例によると、使用する動作ブレーキパスは、従来の操作の2倍以上になり、「大幅に」より大きな容量消費につながる可能性があります。 [103]
ラインの影響のブレーキ曲線と比較して、ETCSレベル2(ラムダブレーキモデルを使用)の卒業証書には、一般的にやや平らなブレーキ曲線が見られます。 etcsブレーキ曲線は、上部速度範囲では少し制限が少なくなりますが、ETSターゲット曲線は、速度範囲が約60 km/h未満で平坦です。 LZBブレーキ曲線の下での速度領域全体にわたる一定の遅延は、高速でのブレーキ能力の低下により制限されます。 ETCSレベル2のブレーキアナウンスの位置は、通常、LZBよりもかなり遅れて行われます。 [105]
ETCSレベル2の場合、160 km/hでの旅行列車、およびより一般的には、従来の主要なテクノロジーおよびセキュリティテクノロジーよりも長い最小差し押さえ時間が予想されます。これは、変更されたブロック分割とATOで打ち消すことができます。一方、以下の速度では、ブロック分割を変更しなくても、より短いタイシーケンスを期待できます。 [106] [六十七]
一方、デジタルノットシュトゥットガルト(dks)では、最適化により、LZBと比較してむしろ急勾配のブレーキ曲線が予想されます。 [107] ブレーキ曲線の最適化のために、ガンマモデルの使用と信頼レベル(EBCL)のバリエーションは、操作ケース後に提案されます。 [108] 7からのEBCLの下のガンマモデルによると、Deutsche Bahnのネットワークに設定されているEBCLネットワークの下にあるガンマモデルは、少なくとも1.00 m/s²のクイックブレーキ遅延は、Baden-Württemberg州の新しい2階建ての地域電力列車を達成する必要があります。 [29] 後の情報によると、これらの条件では160 km/hのブレーキパスは最大1000 mになるはずです。 [109] これは、少なくとも同等で実際には、不利な列車構成でさらに大規模なクイックブレーキの遅延を達成することを目的としています。 [30] ETCS車両機器の連邦政府の資金調達には、一般的にドリフトの場合にガンマブレーキモデルが使用されます。「ブレーキシステムの技術的な変更なしにガンマブレーキモデルの使用が可能」。 [110] 特にETCSブレーキ曲線の境界条件下でのブロック除算が最適化されました。 [111] 列車の長さに応じて、423ラムダまたはガンマモデルは最小予測時間が短くなります。 [112] 開始時に、ガンマまたはラムダブレーキモデルのいずれかが選択されます。 [113]
ドライブ車両のブレーキ曲線のモデリング(それぞれの安全要件を考慮して)の可能性を暴露することにより、スケール効果は、追加費用なしで頻繁に発生するシリーズやプログレッシブなどの機器で発生します。 [114] [115] 最もシンプルなETCS車両機器のコースでは、小さなシリーズまたは歴史的な車両の可能な例として、他方の手で、事前に構成された車両に依存しないブレーキモデルも提供されています。これは、技術的に必要なように、より制限的な監視につながる可能性があります。 [116]
- マイケル・ディーター・クンゼ: 監視機能 。 In:Jochen Trinckauf、Ulrich Maschek、Richard Kahl、Claudia Krahl(編): ドイツのなど 。第1版。 Eurailpress、ハンブルク2020、ISBN 978-3-96245-219-3、 S. 125–147 。
- ↑ a b c d そうです f g h 私 j k l m n o p Q r s t Olivera Pavlovic、OlafGröpler: etcsモンテカルロ法を使用したHGVドロッパーの安全マージンのブレーキ曲線決定 。の: カンファレンスバンド14th International Rail Vehicle Conference (= ドレスデンラッドレール )。 バンド 14 。 Takealaff-Publising、Dresti 2015、ISBN 978-3-87154-547-4、 S. 93–95 。
- ↑ Peter Eichenberger、OlafGröpler: など、ヨーロッパのブレーキ曲線 (= Zevrail Conference Band Sft Graz 。 バンド 129 )。 2005年、ISSN 1618-8330 、 ZDB-ID 2072587-5 、 S. 266–274 。
- ↑ a b c d そうです f g h 私 j k l m Dieter Jaenichen: 貨物列車のクイックブレーキのブレーキ曲線計算など 。の: 鉄道エンジニア 。 バンド 65 、 いいえ。 6 、2016、 S. 17–22 。
- ↑ a b c d そうです f g h 私 j k l m n o 国際鉄道協会(編): UIC-Kodex 544-1 。ブレーキ – ブレーキ性能。 6.エディション。パリ2014、ISBN 978-2-7461-2298-7、 S. 20 ff。 42、66 ff 。
- ↑ a b c d そうです f g h 私 j k ピーター・エイチェンバーガー: 容量はなどを通じて増加します 。の: 信号 +ワイヤ 。 バンド 99 、 いいえ。 3 、2007年、 S. 6–14 。
- ↑ Gregor Theeg、BélaVincze: ヨーロッパの列車の影響システムの比較 。の: 信号 +ワイヤ 。 バンド 99 、 いいえ。 7+8 、2007年、ISSN 0037-4997 、 S. 6–12 。
- ↑ a b c d パトリック・ゾータルト: パフォーマンスとサービスの質 。 In:Peter Stanley(hrsg。): エンジニアのためのなど 。第1版。 Eurailpress、ハンブルク2011、ISBN 978-3-7771-0416-4、 S. 136–141 。
- ↑ a b c d そうです f g h 私 j k l m n OlafGröpler: ブレーキパスとブレーキ距離の安全性など 。の: Zevrail 。 バンド 132 、 いいえ。 1-2 、2008年1月、ISSN 1618-8330 、 S. 31–39 (テキストによると、エッセイは2006年11月に開催された講義の改訂版です。それは明らかに2006年の終わりの立場を表しています。)。
- ↑ などの仕様、サブセット026、セクション3.6.8.1
- ↑ ウラ・メッツガー、アンリ・クロス: DB SystemTechnikの列車制御シミュレーター(TCSIM) 。の: 鉄道エンジニア 。 バンド 六十一 、 いいえ。 8 、2010、 S. 44–48 。
- ↑ a b c d などの仕様、サブセット026、バージョン3.6.0、A.3.2
- ↑ などの仕様、サブセット026、バージョン3.6.0、3.13.2.3.7.1
- ↑ リチャード・カール: などレベル2 。 In:Jochen Trinckauf、Ulrich Maschek、Richard Kahl、Claudia Krahl(編): ドイツのなど 。第1版。 Eurailpress、ハンブルク2020、ISBN 978-3-96245-219-3、 S. 204 。
- ↑ などの仕様、サブセット026、バージョン3.6.0、3.13.8.5
- ↑ a b トーマス・リチャート、ニコラス・アン: 容量と堅牢な利益の評価 。の: 一般的な鉄道レビュー 。 いいえ。 294 、2019年6月、 ZDB-ID 2042624-0 、 S. 15–23 。
- ↑ などの仕様、サブセット026、バージョン3.6.0、3.13.2.3.7.3
- ↑ などの仕様、サブセット026、バージョン3.6.0、3.13.9.3.5.6
- ↑ a b c d ラース・フェラウアー: フラットなどの効果時間依存性ルート機器に対するブレーキ曲線。 ドレスデン工科大学、2019年2月、 S. 1 f。、10、40 f。、51 、 2019年4月22日に取得 。
- ↑ David Morton、MaikBähr、Rolf Detering、Gregor Theeg: ETCおよびATOを使用した引張配列時間の最適化 。の: 信号 +ワイヤ 。 バンド 104 、 いいえ。 十 、2012、 S. 16–19 。
- ↑ ERA、UNISIG、EEIG ERTMSユーザーグループ(HRSG。): ATOなど 。システム要件仕様。 4. MAI 2018、 S. 24 ff。(セクション7.1.3) (ファイルSubset-125-010.Docx in zipアーカイブ [2019年4月25日にアクセス])。
- ↑ などの仕様、サブセット026、バージョン3.6.0、セクション3.13.2.3.1.1。
- ↑ などの仕様、サブセット026、バージョン3.6.0、図28
- ↑ などの仕様、サブセット026、バージョン3.6.0、3.13.4.3.2
- ↑ などの仕様、サブセット026、バージョン3.6.0、3.13.10.1
- ↑ などの仕様、サブセット026、バージョン3.6.0、3.13.10.3.9
- ↑ などの仕様、サブセット026、バージョン3.6.0、3.13.10.4.2
- ↑ などの仕様、サブセット026、バージョン3.6.0、セクション3.13.1.3 /図28。
- ↑ a b c d そうです f g h 私 j ステファン・ホーン、オリベラ・パブロビッチ: ETCSブレーキ曲線を決定する際のモンテカルロ法の機会と可能性 。の: 鉄道鉄道 。 いいえ。 9 、2017年9月、ISSN 0013-2845 、 S. 50–55 。
- ↑ a b c d そうです f マルコ・ニクリッチ: 車両配送契約。 (PDF)付録1:車両の小冊子。 (オンラインではもう利用できません。)2020年9月16日、 S. 21 、アーカイブされています オリジナル 午前 16. 2020年9月 ; 2020年9月16日に取得 ( “design”;要件33091.dosto_pzb.aa.38、.40a、.41、.42、.240、.241)。
- ↑ a b c d そうです f ルネ・ノイハウザー、ピーター・ラインハート、ルネ・リヒター、トーマス・フォーゲル: デジタルノットシュトゥットガルト:デジタル化はそれ自体が終わりではありません 。の: あなたのトラック 。 いいえ。 3 、2021年3月、ISSN 0948-7263 、 S. 22–27 ( PDF )。
- ↑ a b フランク・ディートリッヒ、マルコ・マイヤー、レネ・ヌー・ハウス、フロリアン・ラー、トーマス・ボグル、ノーマン・ウィザード:ノーマン・ウィザード:ノーマン・ウィザード:ノーマル・ウェンネル: デジタルノットシュトゥットガルトの車両改造 。の: 鉄道エンジニア 。 バンド 72 、 いいえ。 9 、2021年9月、ISSN 0013-2810 、 S. 39–45 ( PDF )。
- ↑ 相互運用性への方法:ETCSおよびTRAIN BRAKING 。 In:欧州委員会(編): 信号 。 いいえ。 11 、2009年4月、 S. 2 f 。 ( Europa.eu [PDF; 2018年12月18日にアクセス])。
- ↑ a b c d そうです f ピーターウィンター: ERTMSの大要 。第1版。 EurailPress、2009、ISBN 978-3-7771-0396-9、 S. 139 f。、211–223、236 。
- ↑ などの仕様、サブセット026-3、A.3.8.1
- ↑ a b などの仕様、サブセット026、バージョン3.6.0、3.13.6.2.1.4
- ↑ などの仕様、サブセット026、バージョン3.6.0、3.13.6.2.1.7
- ↑ エルンスト・ホーマン: ブレーキシステム制御サークルによるモンテカルロ分析の拡張ブレーキカーブを改善する 。の: Zevrail、Glasers Annalen 。 バンド 146 、 いいえ。 11-12 、2022年11月、ISSN 1618-8330 、 ZDB-ID 2072587-5 、 S. 470–473 。
- ↑ 国立鉄。 (PDF)など、従来のネットワーク上の完全な監督者。の: infrabel.be。 インフラベル、2018年3月26日、 S. 12 、 2020年10月7日にアクセス (ベラルーシ人)。
- ↑ 国家の要件と価値。 (PDF)など、従来のネットワークで完全な監督が残します。の: infrabel.be。 インフラベル、18。2016年11月、 S. 9 、 2018年12月1日にアクセス (ベラルーシ人)。
- ↑ a b フィリップ・ピンター: DB Netz AGのルート上のETCSの国家価値の概要。 (PDF): fahrweg.dbnetze.com。 DB Netz、2022年1月27日、 2022年2月4日にアクセス 。
- ↑ フィンランド国立ERTMS/etcsパラメーター (= フィンランド交通機関からの指示 。 いいえ。 20 )。 2015、ISBN 978-952-317-128-2、ISSN 1798-6648 、 S. 26 ( PDF [2018年12月1日にアクセス])。
- ↑ アンドレ・フェルト、ニルスは知らなかった、トビアス・ウォルケ、ジャンプスジェイコブス: ルクセンブルク鉄道網のETCSパラメーターの分析と最適化 。の: 信号 +ワイヤ 。 バンド 109 、 いいえ。 3 、2017年3月、ISSN 0037-4997 、 S. 6–17 ( rwth-aachen.de [PDF])。
- ↑ トラックサイドから送信されたなどの要件について説明します。 (PDF)テクニカルノート – TN 029:2018。の: Transport.nsw.gov.au。 輸送資産標準局、3。October2018、 S. 43 f。 、 2018年10月3日にアクセス (英語)。
- ↑ テクニカルノート – TN 015:2020。 (PDF): nsw.gov.au. 輸送資産標準局、18。2020年8月、 P. 33(PDFで38) 、 2021年1月8日にアクセス (英語)。
- ↑ 信号/設計/など。 の: banenor.no。 Bane Nor、2018年1月11日、 2018年12月1日にアクセス (ノルウェー)。
- ↑ 鉄道輸送局の社長の更新。 (PDF): utk.gov.pl. PKP Polskie Linie Kolejowe S.A.、30。October2018、 S. 2 、 2021年1月7日にアクセス (研磨)。
- ↑ a b スイスの「国家価値」のプロジェクト基準。 (PDF)ビジネスユニットSAZ、システムリーダーシップなど、2016年3月16日、 S. 4、30、46、56、63 、 2018年11月24日にアクセス 。
- ↑ 全国 /デフォルトのデータのリスト / Wondons / Default値のリスト。 (PDF): smlouvy.gov.cz。 2018年12月1日にアクセス (CZ)。
- ↑ Joost M. Jansen: ERTMS/etcsハイブリッドレベル3。 (PDF)オランダ鉄道網のシミュレーションベースの影響評価。の: repository.tudelft.nl。 10. 2019年5月、 S. 25 、 2019年9月8日にアクセス (英語)。
- ↑ a b ピーター・ラインハート: 「最大パフォーマンス」のための&Co。 (PDF)デジタルノットシュトゥットガルトに関するワークショップレポート。 (オンラインではもう利用できません。)DBプロジェクトStuttgart -Ulm GmbH、2019年11月21日、 S. 51 f。 、アーカイブされています オリジナル 午前 21. 2019年11月 ; 2019年11月22日にアクセス 。
- ↑ ピーター・ラインハート: 「デジタル化」の機会とサクサクポイント:デジタルノットシュトゥットガルトからの暫定バランス。 (PDF): tu-dresden.de。 ドイツ・バーン、2022年11月3日 S. 35 、 2022年11月5日にアクセス 。
- ↑ a b c オルガ・フランク、フランク・ミンデ、エルンスト・ホーマン、オラフ・グレプラー: ATOと強度の閉鎖:ATOで非常に低い強度閉鎖(XNH)を考慮して 。の: Zevrail、Glasers Annalen、Conference Band Sft Graz 2022 。 バンド 146 、2022、ISSN 1618-8330 、 ZDB-ID 2072587-5 、 S. 80–89 。
- ↑ エミリア・コパー、アンドルゼ・コチャン、ukasz gruba: ETCS車両のブレーキ曲線に対する選択された国家価値の効果のシミュレーション 。の: テレマティクスによる輸送の開発 。 19th International Conferenceon Transport System Telematics、TST 2019、Jaworze、Poland、2月27日 – 2019年3月2日、選ばれた論文。 いいえ。 1049 。 Springs、2019、ISBN 978-3-03027546-4、ISSN 1865-0929 、 S. 17–31 、doi: 10,1007/978-3-030-27547-1 。
- ↑ 欧州鉄道研究所(HRSG。): 高速度列車のブレーキ評価(v マックス > 200 km/h)遅延による (= ブレーキングの質問 )。ユトレヒト1994年9月(レポート番号Erri B 126/RP 16)。
- ↑ 欧州鉄道研究所(HRSG。): システム要件仕様バージョン3.01 。第3公式バージョン – 1996年8月。1996年8月、4.5、 S. 4–58–4–94 。
- ↑ ピーター・シュミット: Grazでの第34回会議「モダンレールビークル」 。の: Eisenbahn-Revue International 。 いいえ。 12番目 、2002年12月、ISSN 1421-2811 、 S. 558–560 。
- ↑ a b c d そうです f g h 私 アンドレアスシンガー、ゲルハルトヴォース: ラジオドラフトの影響を伴う高速トラフィックのためのブレーキ曲線 。の: Zevrail 。 バンド 123 、 いいえ。 2 、1999年2月、ISSN 1618-8330 、 S. 53–60 。
- ↑ a b c d そうです f g h アンドレアスシンガー: ラジオ列車の影響を伴う高速トラフィックのためのブレーキ曲線の開発とテスト(FZB) 。の: カンファレンスバンド第3鉄道車両会議 (= ドレスデンラッドレール )。 バンド 3 。 Takeload-Publisher、Dresding 1999、 S. 34–36 。
- ↑ マンフレッドフランク: ケルンライン/メインルートのLZBシステムの拡張 。の: 信号 +ワイヤ 。 バンド 95 、 いいえ。 十 、2003年、ISSN 0037-4997 、 S. 31–33 。
- ↑ D.ジェイスルズ、R。ジェーンシュ: Cologne-Frankfurt/Mainの新しいライン用の新しいLZB/FZB 。ドレスデン1997年4月、 S. 最初に30 。
- ↑ Werener詩: BetuwerルートのBR 189の機関車 。の: Eisenbahn-Revue International 。 いいえ。 4 、2008年、ISSN 1421-2811 、 S. 170–174 。
- ↑ フランク・ウォレンバーグ、ロブ・テ・パップ、リューウェ・ジグターマン: 標準化された列車制御に向けて進歩します 。の: 鉄道ガゼットインターナショナル 。 バンド 168 、 いいえ。 3 、2012、 S. 35–38 。
- ↑ ピーター・シュミー: 第36回会議「モダンレールビークル」 。 In:Railway Revue International。問題2/2006、pp。78–79。
- ↑ 変更におけるertmsformalspecsの役割要求1249 EUGによる解決。 の: ertmsolutions.com。 15. 2016年6月、 2018年12月5日にアクセス (英語)。
- ↑ などの仕様、サブセット026、セクション3.13.9.5バージョン3.4.0および3.6.0と比較して
- ↑ ご参照ください レベル1および2のETCの技術的相互運用性のための安全要件 (サブセット091)、S。5。
- ↑ a b c マイケル・キュムリング、スヴェン・ワンストラス: デジタルリーディングおよびヒューズテクノロジーでルート容量を最大化する 。の: 鉄道鉄道 。 いいえ。 7+8 、2021年8月、ISSN 0013-2845 、 S. 16–21 ( PDF )。
- ↑ 国際鉄道協会(編): Lambda列車用のETCSクイックブレーキバルブのブレーキ換気性能 。国際鉄道ソリューション、IRS 50544-3。第1版。パリ2020、ISBN 978-2-7461-2795-1、 S. 3、9 。
- ↑ ミシェル・ヴァン・リーファーリング、ジャン・バプティスト・シモネット、アンリ・ヴァン・フーテン、ミシェル・ルーセン、ウーター・マルファイト、ピオ・ギド、ジョセフ・ドッペルバウアー: ERTMS長期的な視点。 (PDF)欧州鉄道機関、18。Dezember2015、 S. 6、12 f。 、アーカイブされています オリジナル 午前 3. 2022年9月 ; 2019年5月26日に取得 (英語)。
- ↑ 鉄道拡張プログラム。 (PDF)スタンドレポート2019。で: admin.ch。 連邦運輸省、 S. 89 f。 、 2020年5月17日にアクセス 。
- ↑ マーティンモック: 新しいローリング材料SOB 。 In:Association Swiss機関車のドライバーと競争相手(編): クレイジーフォリオ 。 いいえ。 192 、2019、 ZDB-ID 2303252-2 、 S. 41–43 ( PDF IM Webアーカイブ )。
- ↑ Jakub Marek、Ivo Myslivec、BohumilDrápal: ETCSブレーキ曲線のモデル:すでにブレーキ列車の改善の提案 。の: 信号 +ワイヤ 。 バンド 116 、 いいえ。 3 、2020、ISSN 0037-4997 、 S. 36–46 。
- ↑ Marc Ehret: 仮想列車ブレーキ。 (PDF)距離を短くする – コロナにもかかわらず。の: ews.tu-berlin.de。 ドイツ航空宇宙センター、Knorr-Bremse、2020年5月11日、 S. 46 、 2020年6月18日に取得 。
- ↑ アンドレアス・アスファルグ: システムテクノロジーパフォーマンスレポート2021/2022。 (PDF): db-systemtechnik.de。 DB SystemTechnik、2022年9月、 S. 39 、 2022年11月1日にアクセス 。
- ↑ ピーター・ラインハート、ダニエル・シェラー: 要約ワークショップ5などの最大パフォーマンス。 (PDF): ERA.EUROPA.EU。 ドイツ・バーン、スイス連邦鉄道、2022年4月28日、 S. 2、3 、 2023年1月21日にアクセス (英語)。
- ↑ AndréSchweizer、Christian Schlatter、Urs Guggisberg、RuediHösli: 列車に影響を与え、通常のレーンプライベートトラックBLSおよびSOBにおけるL1 LSへの移行の概念と実装 。の: スイス鉄道の回転 。 いいえ。 3 、2015年3月、ISSN 1022-7113 、 S. 146–149 。
- ↑ ピーター・シュミット: ÖBBでの列車の影響 。の: Eisenbahn-Revue International 。 いいえ。 4 、2000、ISSN 1421-2811 、 S. 168 f 。
- ↑ パトリック・カスタン: シグナリングシステムの進化と新しい高速ラインでのETCの実装 。の: 信号 +ワイヤ 。 バンド 98 、 いいえ。 12番目 、2006年、ISSN 0037-4997 、 S. 44–47 。
- ↑ ベルリンでの会議など 。の: Eisenbahn-Revue International 。 いいえ。 2 、2008年、ISSN 1421-2811 、 S. 72 f 。
- ↑ a b Jens Hartmann、Sascha Hardel: レベル2などの、またはそれにもかかわらず、ルートのパフォーマンスの向上? (PDF): ews.tu-berlin.de。 DB Netz、2022年5月23日、 S. 27 f。 、 2022年5月30日にアクセス 。
- ↑ Marc Behrens、Mirko Caspar、Andreas Distler、Nikolaus Fries、Sascha Hardel、JanKreßner、Ka-Yan Lau、Rolf Pensold: より多くの旅行能力のための高速ガイドと融合テクノロジー 。の: 鉄道エンジニア 。 バンド 72 、 いいえ。 6 、2021年6月、ISSN 0013-2810 、 S. 50–55 ( PDF )。
- ↑ ラース・フェラウアー、リチャード・カール: レベル交差点でのBrake Curvesによる運用制限の防止 。の: 鉄道エンジニア 。 バンド 71 、 いいえ。 8 、2020年8月、ISSN 0013-2810 、 S. 34–37 ( PDF )。
- ↑ Markus Leutwyler: 博士とのインタビューPeterFüglistaler 。の: locofolio 。 いいえ。 初め 、2017、 ZDB-ID 2303252-2 、 S. 17–19 ( archive.org [PDF])。
- ↑ ドイツ:救いとしてのデジタル信号ボックスなど 。の: Eisenbahn-Revue International 。 いいえ。 11 、2019年11月、ISSN 1421-2811 、 S. 565 。
- ↑ SBB Route Sion-SierreはETCSレベル2に変換されました 。の: Eisenbahn-Revue International 。 いいえ。 12番目 、2018年12月、ISSN 1421-2811 、 S. 623–625 。
- ↑ 操作中のティチーノの新しいetcsセクション 。の: Eisenbahn-Revue International 。 いいえ。 7 、2018年7月、ISSN 1421-2811 、 S. 354 。
- ↑ ステファンガット: etoとato 。の: locofolio 。 いいえ。 初め 、2019、 ZDB-ID 2303252-2 、 S. 11 ( PDFファイル )。
- ↑ a b スイス:などは、移動時間の延長をもたらします 。の: Eisenbahn-Revue International 。 いいえ。 2 、2020年2月、ISSN 1421-2811 、 S. 100 。
- ↑ EtoやAtoのように。 (オンラインで利用できなくなりました。): vslf.com。 スイスの機関車の運転手と候補者の協会、2020年2月20日、アーカイブされた オリジナル 午前 2021年1月25日 ; 2020年10月9日に取得 。
- ↑ Stefan Ehrbar: より多くの停止があれば、SBBは電車をより時間厳守にしたいと考えています 。の: Luzerner Zeitung 。 13. 2021年11月、 S. 12番目 。
- ↑ RenéDonzé: 新しい張力ロックは遅延につながります 。の: 日曜日のNZZ 。 2023年2月19日、 S. 9 。
- ↑ ニールズ・ノイバーグ: Deutsche Bahn AGでのETCSレベル1の限定監督の使用 。の: 信号 +ワイヤ 。 バンド 106 、 いいえ。 12番目 、2014年12月、ISSN 0037-4997 、 S. 12–18 。
- ↑ Gamma列車などのL1LS。 (PDF)ブレーキ性能。の: fahrweg.dbnetze.com。 DB Netz AG、2019年6月20日、 S. 4、9 、 2019年7月29日にアクセス 。
- ↑ フィリップ・ピンター: ETCSベースライン2および3のNTR。 (PDF): fahrweg.dbnetze.com。 DB Netz、2020年8月18日、 S. 3 、 2021年6月4日にアクセス 。
- ↑ uwedräger: など、DB AGの国家列車セキュリティシステムへの移行 。の: 信号 +ワイヤ 。 バンド 96 、 いいえ。 11 、2004年、ISSN 0037-4997 、 S. 6–15 。
- ↑ ベネディクト・ウェンツェル、セバスチャン・ペックトールド: ETCSの計画 – 例VDE 8を使用した新しい側面と経験 。の: 鉄道エンジニア 。 バンド 六十四 、 いいえ。 3 、2015年3月、ISSN 0013-2810 、 S. 36–39 。
- ↑ Helmut Steindl: International Signal+Wire Congress 2014 。の: 信号 +ワイヤ 。 バンド 107 、 いいえ。 初め 、2014年1月、ISSN 0037-4997 、 S. 6–21 。
- ↑ Lars Brune、Pascal Kahnert、Julia Kalkshreiber、Bavo Lens: などと国境:相互運用性と機器のバリエーション 。の: 信号 +ワイヤ 。 バンド 113 、 いいえ。 7+8 、2021年8月、ISSN 0037-4997 、 S. 23–35 ( PDF )。
- ↑ ロバート・シュウェンツァー: 国境でのさまざまなブレーキ曲線の影響。 (PDF)2021年6月14日、 2021年9月30日に取得 。
- ↑ ピーター・エイチェンバーガー、ブルーノ・スポリ: ETCSレベル2で容量を増やすための最適化されたシグナル伝達の概念 。の: 信号 +ワイヤ 。 バンド 105 、 いいえ。 9 、2013年、ISSN 0037-4997 、 S. 31–36 。
- ↑ S-Bahn StuttgartのコアネットワークでのETCの導入の調査。 (PDF)Abschlussbericht。 WSP Infrastructure Engineering、Nextrail、Quattron Management Consulting、Consulting&Development GmbH、Railistics、30。Januar2019、 S. 283–285、306–308、313、355 、 2019年4月13日に取得 。
- ↑ ピーター・ラインハート: Stuttgart-ULMプロジェクトの運用範囲の利益。 (PDF)ハイライトのラップの概要。 DBプロジェクトStuttgart-Ulm、2020年1月27日、 S. 54 、 2020年1月30日にアクセス 。
- ↑ a b ニコラス・ベイ、ピーター・ラインハート、トーマス・フォーゲル: Digital Knot Stuttgart:車両機器、インフラストラクチャ、操作間の相互作用。 (PDF): bahnprojekt-stuttgart-ulm.de。 Deutsche Bahn、運輸省Baden-Württemberg、2022年12月1日、 S. 14–16 、 2022年12月23日にアクセス 。
- ↑ マクシミリアン・ワース、アンドレアス・シェーベル: ウィーンS-BahnラインのETCSレベル2およびレベル3での最小列車時間 。の: 信号 +ワイヤ 。 バンド 112 、 いいえ。 4 、2020、ISSN 0037-4997 、 S. 21–26 。
- ↑ ラース・フェラウアー、リチャード・カール: INTSブレーキ曲線がインフラストラクチャの計画に及ぼす影響 。の: 鉄道エンジニア 。 バンド 69 、 いいえ。 8 、2019年8月、ISSN 0013-2810 、 S. 34–37 ( PDF )。
- ↑ マイケル・キュムリング: デジタルLSTでのパフォーマンス – しかし、どうやって? (PDF): tu-dresden.de。 DBプロジェクトStuttgart -Ulm、2020年12月17日、 S. 18 、 2020年12月17日に取得 。
- ↑ Mar Marhrens、Enrico Cathehardt、Michael Chewling、Markus Loves、Petin Otin Slosin Sknhaard von Shovels、Sven wanstrath: デジタルノットシュトゥットガルトに向かう途中:概要 。の: 鉄道エンジニア 。 バンド 71 、 いいえ。 4 、2020年4月、ISSN 0013-2810 、 S. 14–18 ( PDF )。
- ↑ Hannes Goers、Peter Reinhart、RüdigerWeiß: シュトゥットガルトノット。 (PDF)など、パフォーマンスと品質のキャリアとしてのキャリアとして。の: vm.baden-wuerttemberg.de。 DB Netz、DB Project Stuttgart -Ulm、2019年1月9日、 S. 22 f。、36 、 2020年4月24日に取得 。
- ↑ これは、国のための130の新しい二重局の列車がどのように見えるかです。 の: vm.baden-wuerttemberg.de。 運輸省バーデン・ヴュルテンベルク、2022年5月25日、 2022年5月25日にアクセス 。
- ↑ クレイジー: 欧州列車セキュリティシステムERTMS(ヨーロッパ鉄道交通管理システム)と自動化された鉄道操作(ATO)のコンポーネントを備えた鉄道車両の機器を宣伝するためのガイドラインの発表「デジタルノットでのERTMSのERTMSの導入の一部としてシュトゥットガルト ” 。 In:連邦司法省と消費者保護のため(編): 連邦官報、公式部分 。 Bundesanzeiger Verlag、2021年2月5日、ISSN 0344-7634 、 S. 6 ( PDF [2021年2月5日に取得]財団バンツ05.02.2021 b2)。
- ↑ JonasDenißen、Markus Flieger、MichaelKümmling、MichaelKüpper、Sven Wanstrath: Digital Knot StuttgartのETCSレベル2を使用したブロック除算の最適化 。の: 信号 +ワイヤ 。 バンド 113 、 いいえ。 7+8 、2021年8月、ISSN 0037-4997 、 S. 60–67 ( PDF )。
- ↑ デジタルノットシュトゥットガルトの紹介。 (PDF): bahnprojekt-stuttgart-ulm.de。 ドイツ・バーン、2022年4月12日、 S. 29 、 2022年4月21日にアクセス 。
- ↑ etcs&Co。「最大パフォーマンス」(ブレーキ)のデジタルノットシュトゥットガルトのハイライト。 (PDF): bahnprojekt-stuttgart-ulm.de。 Deutsche Bahn、2022年10月24日、 S. 19 、 2022年10月29日にアクセス 。
- ↑ ThorstenBüker: システム全体での鉄道思考 – デジタル化は本質的な機会を開きます 。の: 信号 +ワイヤ 。 バンド 112 、 いいえ。 7+8 、2020、ISSN 0037-4997 、 S. 3 。
- ↑ ThorstenBüker: ドイツのタクトとデジタル化 – システムネットワークでさらに達成します。 (PDF): eba.bund.de. Quattron、Via-Con、29。2020年9月、 S. 6 、 2020年10月9日に取得 。
- ↑ ハインリッヒ・シュルマイスター、クリストフ・リートマン: Siemensは「Swissapp」などを開始します 。の: スイス鉄道の回転 。 いいえ。 11 、2021年11月、ISSN 1022-7113 、 S. 595 。
Recent Comments