Steife Gleichung – Wikipedia
Differentialgleichung mit ungewöhnlicher Instabilität
In der Mathematik a steife Gleichung ist eine Differentialgleichung, für die bestimmte numerische Verfahren zum Lösen der Gleichung numerisch instabil sind, es sei denn, die Schrittgröße wird als extrem klein angesehen. Es hat sich als schwierig erwiesen, eine genaue Definition der Steifheit zu formulieren, aber die Hauptidee ist, dass die Gleichung einige Begriffe enthält, die zu einer schnellen Variation der Lösung führen können.
Wenn eine Differentialgleichung numerisch integriert wird, würde man erwarten, dass die erforderliche Schrittgröße in einem Bereich, in dem die Lösungskurve große Variationen aufweist, relativ klein ist und relativ groß ist, wo sich die Lösungskurve gerade richtet, um sich einer Linie mit einer Steigung nahe Null zu nähern. Bei einigen Problemen ist dies nicht der Fall. Damit ein numerisches Verfahren eine zuverlässige Lösung für das Differentialsystem liefert, muss die Schrittgröße manchmal in einem Bereich, in dem die Lösungskurve sehr glatt ist, auf einem unannehmbar kleinen Niveau liegen. Das Phänomen ist bekannt als Steifheit. In einigen Fällen kann es mit derselben Lösung zwei verschiedene Probleme geben, eines ist jedoch nicht steif und das andere ist steif. Das Phänomen kann daher keine Eigenschaft der exakten Lösung sein, da dies für beide Probleme gleich ist und eine Eigenschaft des Differentialsystems selbst sein muss. Solche Systeme sind daher bekannt als steife Systeme.
Motivierendes Beispiel[edit]


Betrachten Sie das Anfangswertproblem
-
-
((1)
-
Die genaue Lösung (in Cyan dargestellt) ist
-
-
((2)
-
Wir suchen eine numerische Lösung, die das gleiche Verhalten zeigt.
Die Abbildung (rechts) zeigt die numerischen Probleme für verschiedene numerische Integratoren, die auf die Gleichung angewendet werden.
- Eulers Methode mit einer Schrittgröße von h = 1/4 schwingt wild und verlässt schnell den Bereich des Diagramms (rot dargestellt).
- Eulers Methode mit der halben Schrittweite, h = 1/8, erzeugt eine Lösung innerhalb der Diagrammgrenzen, schwingt jedoch um Null (grün dargestellt).
- Die trapezförmige Methode (dh die zweistufige Adams-Moulton-Methode) ist gegeben durch
-
-
yn+1=yn+12h((f((tn,yn)+f((tn+1,yn+1)),{ displaystyle y_ {n + 1} = y_ {n} + { frac {1} {2}} h left (f (t_ {n}, y_ {n}) + f (t_ {n + 1}) , y_ {n + 1}) right),}
((3)
-
wo
y‘=f((t,y){ displaystyle textstyle y ‘= f (t, y)}. Wenn Sie diese Methode anstelle der Euler-Methode anwenden, erhalten Sie ein viel besseres Ergebnis (blau). Die numerischen Ergebnisse sinken monoton auf Null, genau wie die exakte Lösung.
-




Eines der bekanntesten Beispiele für die steifen gewöhnlichen Differentialgleichungen (ODEs) ist ein System, das die chemische Reaktion von Robertson beschreibt[1]::
-
-
x˙=– –0,04x+104y⋅z{ displaystyle { dot {x}} = – 0,04x + 10 ^ {4} y cdot z}
y˙=0,04x– –104y⋅z– –3⋅107y2{ displaystyle { dot {y}} = 0,04x-10 ^ {4} y cdot z-3 cdot 10 ^ {7} y ^ {2}}
z˙=3⋅107y2{ displaystyle { dot {z}} = 3 cdot 10 ^ {7} y ^ {2}}((4)
-






Wenn man dieses System zum Beispiel in einem kurzen Intervall behandelt,
t∈[0,40]{ displaystyle t in [0,40]}}Es gibt kein Problem bei der numerischen Integration. Wenn das Intervall jedoch sehr groß ist (1011 sagen wir), dann können viele Standardcodes es nicht richtig integrieren.

![Zinn [0,40]](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2f7f3737f6e7769ce977f5368e9842c8da1b998)
Zusätzliche Beispiele sind die Sätze von ODEs, die sich aus der zeitlichen Integration großer chemischer Reaktionsmechanismen ergeben. Hier ergibt sich die Steifheit aus der Koexistenz sehr langsamer und sehr schneller Reaktionen.[citation needed] Um sie zu lösen, können die Softwarepakete KPP und Autochem verwendet werden.
Steifigkeitsverhältnis[edit]
Betrachten Sie das inhomogene System mit linearem konstanten Koeffizienten
-
-
y‘=EINy+f((x),{ displaystyle mathbf {y} ‘= mathbf {A} mathbf {y} + mathbf {f} (x),}
((5)
-


wo
y,f∈R.n{ displaystyle mathbf {y}, mathbf {f} in mathbb {R} ^ {n}}und
EIN{ displaystyle mathbf {A}}

ist eine Konstante, diagonalisierbar,
n×n{ displaystyle n times n}

Matrix mit Eigenwerten
λt∈C.,t=1,2,…,n{ displaystyle lambda _ {t} in mathbb {C}, t = 1,2, ldots, n}

(als verschieden angenommen) und entsprechende Eigenvektoren
ct∈C.n,t=1,2,…,n{ displaystyle mathbf {c} _ {t} in mathbb {C} ^ {n}, t = 1,2, ldots, n}

. Die allgemeine Lösung von (5) nimmt die Form an


-
-
y((x)=∑t=1nκtexp((λtx)ct+G((x),{ displaystyle mathbf {y} (x) = sum _ {t = 1} ^ {n} kappa _ {t} exp ( lambda _ {t} x) mathbf {c} _ {t} + mathbf {g} (x),}
((6)
-


wo das κt sind beliebige Konstanten und
G((x){ displaystyle mathbf {g} (x)}ist ein besonderes Integral. Nehmen wir das jetzt an


-
-
R.e((λt)<0,t=1,2,…,n,{ displaystyle Re ( lambda _ {t}) <0, qquad t = 1,2, ldots, n,}
((7)
-


was bedeutet, dass jeder der Begriffe


wie
x→∞{ displaystyle x rightarrow infty}, so dass die Lösung
y((x){ displaystyle mathbf {y} (x)}



nähert sich
G((x){ displaystyle mathbf {g} (x)}asymptotisch als
x→∞{ displaystyle x rightarrow infty};; der Begriff
exp((λtx)ct{ displaystyle exp ( lambda _ {t} x) mathbf {c} _ {t}}wird monoton abfallen, wenn λt ist real und sinusförmig, wenn λt ist komplex. Dolmetschen x Zeit zu sein (wie es oft bei körperlichen Problemen der Fall ist),
Σt=1nκtexp((λtx)ct{ displaystyle Sigma _ {t = 1} ^ {n} kappa _ {t} exp ( lambda _ {t} x) mathbf {c} _ {t}}

heißt das vorübergehende Lösung und
G((x){ displaystyle mathbf {g} (x)}

das stationäre Lösung. Wenn
|R.e((λt)|{ displaystyle | Re ( lambda _ {t}) |}ist groß, dann der entsprechende Begriff
κtexp((λtx)ct{ displaystyle kappa _ {t} exp ( lambda _ {t} x) mathbf {c} _ {t}}

wird schnell verfallen als
x nimmt zu und heißt daher a schnell vorübergehend;; wenn


ist klein, der entsprechende Begriff
zerfällt langsam und heißt a langsam vorübergehend. Lassen
λ¯,λ_∈{λt,t=1,2,…,n}}{ displaystyle { overline { lambda}}, { underline { lambda}} in { lambda _ {t}, t = 1,2, ldots, n }}definiert werden durch


-
-
|R.e((λ¯)|≥|R.e((λt)|≥|R.e((λ_)|,t=1,2,…,n{ displaystyle | Re ({ overline { lambda}}) | geq | Re ( lambda _ {t}) | geq | Re ({ underline { lambda}}) |, qquad t = 1 , 2, ldots, n}
((8)
-


damit
κtexp((λ¯x)ct{ displaystyle kappa _ {t} exp ({ overline { lambda}} x) mathbf {c} _ {t}}ist der schnellste Übergang und
κtexp((λ_x)ct{ displaystyle kappa _ {t} exp ({ underline { lambda}} x) mathbf {c} _ {t}}

die langsamste. Wir definieren nun die Steifigkeitsverhältnis wie


-
-
|R.e((λ¯)||R.e((λ_)|.{ displaystyle { frac {| Re ({ overline { lambda}}) |} {| Re ({ underline { lambda}}) |}}.} [2]
((9)
-


Charakterisierung der Steifheit[edit]
In diesem Abschnitt betrachten wir verschiedene Aspekte des Phänomens der Steifheit. “Phänomen” ist wahrscheinlich ein passenderes Wort als “Eigentum”, da letzteres eher impliziert, dass Steifheit in präzisen mathematischen Begriffen definiert werden kann; Es stellt sich heraus, dass dies selbst für die eingeschränkte Klasse linearer Systeme mit konstantem Koeffizienten nicht zufriedenstellend möglich ist. Wir werden auch einige qualitative Aussagen sehen, die gemacht werden können (und meistens gemacht wurden), um den Begriff der Steifheit zusammenzufassen, und angeben, was wahrscheinlich die zufriedenstellendste davon ist “Definition” der Steifheit.
JD Lambert definiert die Steifheit wie folgt:
Wenn eine numerische Methode mit einem endlichen Bereich absoluter Stabilität, die auf ein System mit beliebigen Anfangsbedingungen angewendet wird, gezwungen ist, in einem bestimmten Integrationsintervall eine Schrittlänge zu verwenden, die im Verhältnis zur Glätte der exakten Lösung in diesem Intervall übermäßig klein ist , dann soll das System sein steif in diesem Intervall.
Es gibt andere Eigenschaften, die viele Beispiele für steife Probleme aufweisen, aber für jedes gibt es Gegenbeispiele, so dass diese Eigenschaften keine guten Definitionen der Steifheit ergeben. Nichtsdestotrotz werden Definitionen, die auf diesen Merkmalen basieren, von einigen Autoren häufig verwendet und sind gute Hinweise auf das Vorhandensein von Steifheit. Lambert bezeichnet diese als “Aussagen” eher als Definitionen aus den oben genannten Gründen. Einige davon sind:
- Ein lineares System mit konstantem Koeffizienten ist steif, wenn alle seine Eigenwerte einen negativen Realteil haben und das Steifigkeitsverhältnis groß ist.
- Steifheit tritt auf, wenn Stabilitätsanforderungen anstelle von Genauigkeitsanforderungen die Schrittlänge einschränken.
- Steifheit tritt auf, wenn einige Komponenten der Lösung viel schneller zerfallen als andere.[3]
Etymologie[edit]
Der Ursprung des Begriffs “Steifheit” wurde nicht eindeutig festgestellt. Laut Joseph Oakland Hirschfelder ist der Begriff “steif” wird verwendet, weil solche Systeme einer engen Kopplung zwischen dem Fahrer und dem in Servomechanismen angetriebenen entsprechen.[4]
Laut Richard. L. Burden und J. Douglas Faires,
Erhebliche Schwierigkeiten können auftreten, wenn numerische Standardtechniken angewendet werden, um die Lösung einer Differentialgleichung zu approximieren, wenn die genaue Lösung Terme der Form enthält eλtwobei λ eine komplexe Zahl mit negativem Realteil ist.
…
Probleme mit schnell zerfallenden transienten Lösungen treten natürlich in einer Vielzahl von Anwendungen auf, einschließlich der Untersuchung von Feder- und Dämpfungssystemen, der Analyse von Steuerungssystemen und Problemen in der chemischen Kinetik. Dies sind alles Beispiele für eine Klasse von Problemen, die als steife (mathematische Steifheit) Differentialgleichungssysteme bezeichnet werden, da sie bei der Analyse der Bewegung von Feder- und Massensystemen mit großen Federkonstanten (physikalische Steifheit) angewendet werden.[5]
Zum Beispiel das Anfangswertproblem
-
-
mx¨+cx˙+kx=0,x((0)=x0,x˙((0)=0,{ displaystyle m { ddot {x}} + c { dot {x}} + kx = 0, qquad x (0) = x_ {0}, qquad { dot {x}} (0) = 0,}
((10)
-


mit m = 1, c = 1001, k = 1000, kann in der Form geschrieben werden (5) mit n = 2 und
-
-
EIN=((01– –1000– –1001),{ displaystyle mathbf {A} = left ({ begin {array} {rr} 0 & 1 \ – 1000 & -1001 end {array}} right),}
((11)
-


-
-
((12)
-
-
-
x((0)=((x00),{ displaystyle mathbf {x} (0) = left ({ begin {array} {c} x_ {0} \ 0 end {array}} right),}
((13)
-


und hat Eigenwerte
. Beide Eigenwerte haben einen negativen Realteil und das Steifigkeitsverhältnis ist


-
-
|– –1000||– –1|=1000,{ displaystyle { frac {| -1000 |} {| -1 |}} = 1000,}
((14)
-


das ist ziemlich groß. System (10) erfüllt dann sicherlich die Aussagen 1 und 3. Hier die Federkonstante k ist groß und die Dämpfungskonstante c ist noch größer.[6] (Beachten Sie, dass “groß” ist ein vager, subjektiver Begriff, aber je größer die oben genannten Mengen sind, desto ausgeprägter ist der Effekt der Steifheit.) Die genaue Lösung für (10) ist
-
-
((15)
-
Beachten Sie, dass (15) verhält sich fast wie ein einfaches Exponential x0e– –t, aber die Anwesenheit der e−1000t Term, selbst mit einem kleinen Koeffizienten, reicht aus, um die numerische Berechnung sehr empfindlich für die Schrittgröße zu machen. Stabile Integration von (10) erfordert eine sehr kleine Schrittgröße bis weit in den glatten Teil der Lösungskurve hinein, was zu einem Fehler führt, der viel kleiner ist als für die Genauigkeit erforderlich. Somit erfüllt das System auch Aussage 2 und Lamberts Definition.
A-Stabilität[edit]
Das Verhalten numerischer Methoden bei steifen Problemen kann analysiert werden, indem diese Methoden auf die Testgleichung angewendet werden y ‘ = ky vorbehaltlich der Ausgangsbedingung y(0) = 1 mit
k∈C.{ displaystyle k in mathbb {C}}. Die Lösung dieser Gleichung ist y ((t) = ekt. Diese Lösung nähert sich Null als
t→∞{ displaystyle t to infty}

wann
R.e((k)<0.{ displaystyle mathrm {Re} , (k) <0.}



Runge-Kutta-Methoden[edit]
Auf die Testgleichung angewandte Runge-Kutta-Methoden
y‘=k⋅y{ displaystyle y ‘= k cdot y}nimm das Formular
yn+1=ϕ((hk)⋅yn{ displaystyle y_ {n + 1} = phi (hk) cdot y_ {n}}

und durch Induktion
yn=((ϕ((hk))n⋅y0{ displaystyle y_ {n} = left ( phi (hk) right) ^ {n} cdot y_ {0}}

. Die Funktion
ϕ{ displaystyle phi}

heißt das Stabilitätsfunktion. Also die Bedingung, dass
yn→0{ displaystyle y_ {n} to 0}

wie
n→∞{ displaystyle n to infty}

ist äquivalent zu
|ϕ((hk)|<1{ displaystyle | phi (hk) | <1}







Beispiel: Die Euler-Methoden[edit]


Betrachten Sie die obigen Euler-Methoden. Die explizite Euler-Methode, die auf die Testgleichung angewendet wird
y‘=k⋅y{ displaystyle y ‘= k cdot y}ist
- yn+1=yn+h⋅f((tn,yn)=yn+h⋅((kyn)=yn+h⋅k⋅yn=((1+h⋅k)yn.{ displaystyle y_ {n + 1} = y_ {n} + h cdot f (t_ {n}, y_ {n}) = y_ {n} + h cdot (ky_ {n}) = y_ {n} + h cdot k cdot y_ {n} = (1 + h cdot k) y_ {n}.}


Daher,
yn=((1+hk)n⋅y0{ displaystyle y_ {n} = (1 + hk) ^ {n} cdot y_ {0}}mit
ϕ((z)=1+z{ displaystyle phi (z) = 1 + z}

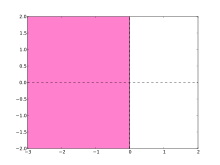
. Der Bereich der absoluten Stabilität für dieses Verfahren ist somit
{z∈C.||1+z|<1}}{ displaystyle {z in mathbb {C} || 1 + z | <1 }}



Das motivierende Beispiel hatte
k=– –15{ displaystyle k = -15}. Der Wert von z bei der Schrittgröße
h=1/.4{ displaystyle h = 1/4}

ist
z=– –15∗1/.4=– –3,75{ displaystyle z = -15 * 1/4 = -3,75}

, die außerhalb des Stabilitätsbereichs liegt. In der Tat konvergieren die numerischen Ergebnisse nicht gegen Null. Allerdings mit Schrittweite
h=1/.8{ displaystyle h = 1/8}

, wir haben
z=– –1,875{ displaystyle z = -1.875}
Dies liegt genau innerhalb des Stabilitätsbereichs und die numerischen Ergebnisse konvergieren gegen Null, wenn auch ziemlich langsam.


Beispiel: Trapezmethode[edit]
Betrachten Sie die Trapezmethode
- yn+1=yn+12h⋅((f((tn,yn)+f((tn+1,yn+1)),{ displaystyle y_ {n + 1} = y_ {n} + { tfrac {1} {2}} h cdot left (f (t_ {n}, y_ {n}) + f (t_ {n +) 1}, y_ {n + 1}) right),}


wenn auf die Testgleichung angewendet
y‘=k⋅y{ displaystyle y ‘= k cdot y}ist
- yn+1=yn+12h⋅((kyn+kyn+1).{ displaystyle y_ {n + 1} = y_ {n} + { tfrac {1} {2}} h cdot left (ky_ {n} + ky_ {n + 1} right).}


Auflösen nach
yn+1{ displaystyle y_ {n + 1}}ergibt


- yn+1=1+12hk1– –12hk⋅yn.{ displaystyle y_ {n + 1} = { frac {1 + { frac {1} {2}} hk} {1 – { frac {1} {2}} hk}} cdot y_ {n} .}


Somit ist die Stabilitätsfunktion
- ϕ((z)=1+12z1– –12z{ displaystyle phi (z) = {1+ {1 over 2} z over 1- {1 over 2} z}}


und der Bereich der absoluten Stabilität ist
-
{z∈C.| |1+12z1– –12z|<1}}.{ displaystyle left {z in mathbb {C} left | left | {1+ {1 over 2} z over 1- {1 over 2} z} right | <1 richtig richtig}.}


Dieser Bereich enthält die Ebene der linken Hälfte, daher ist die Trapezmethode A-stabil. Tatsächlich ist der Stabilitätsbereich identisch mit der Ebene der linken Hälfte und damit der numerischen Lösung von
y‘=k⋅y{ displaystyle y ‘= k cdot y}konvergiert gegen Null, wenn und nur wenn die genaue Lösung tut es. Trotzdem hat die Trapezmethode kein perfektes Verhalten: Sie dämpft alle zerfallenden Komponenten, aber schnell zerfallende Komponenten werden nur sehr mild gedämpft, weil
ϕ((z)→1{ displaystyle phi (z) to 1}wie
z→– –∞{ displaystyle z to – infty}

. Dies führte zum Konzept der L-Stabilität: Eine Methode ist L-stabil, wenn sie A-stabil ist und
|ϕ((z)|→0{ displaystyle | phi (z) | to 0}

wie
z→∞{ displaystyle z to infty}

. Die trapezförmige Methode ist A-stabil, aber nicht L-stabil. Die implizite Euler-Methode ist ein Beispiel für eine L-stabile Methode.[8]


Allgemeine Theorie[edit]
Die Stabilitätsfunktion einer Runge-Kutta-Methode mit Koeffizienten
EIN{ displaystyle A}und
b{ displaystyle b}

ist gegeben durch


- ϕ((z)=det((ich– –zEIN+zebT.)det((ich– –zEIN),{ displaystyle phi (z) = { frac { det (I-zA + zeb ^ {T})} { det (I-zA)}},}


wo
e{ displaystyle e}bezeichnet den Vektor mit Einsen. Dies ist eine rationale Funktion (ein Polynom geteilt durch ein anderes).


Explizite Runge-Kutta-Methoden haben eine streng niedrigere Dreieckskoeffizientenmatrix
EIN{ displaystyle A}und somit ist ihre Stabilitätsfunktion ein Polynom. Daraus folgt, dass explizite Runge-Kutta-Methoden nicht A-stabil sein können.
Die Stabilitätsfunktion impliziter Runge-Kutta-Methoden wird häufig anhand von Ordnungssternen analysiert. Der Ordnungsstern für eine Methode mit Stabilitätsfunktion
ϕ{ displaystyle phi}ist definiert als die Menge
{z∈C.||ϕ((z)|>|ez|}}{ displaystyle {z in mathbb {C} || phi (z) |> | mathrm {e} ^ {z} | }}[9]


Mehrstufige Methoden[edit]
Lineare mehrstufige Methoden haben die Form
- yn+1=∑ich=0seinichyn– –ich+h∑j=– –1sbjf((tn– –j,yn– –j).{ displaystyle y_ {n + 1} = sum _ {i = 0} ^ {s} a_ {i} y_ {ni} + h sum _ {j = -1} ^ {s} b_ {j} f (t_ {nj}, y_ {nj}).}


Auf die Testgleichung angewendet werden sie
- yn+1=∑ich=0seinichyn– –ich+hk∑j=– –1sbjyn– –j,{ displaystyle y_ {n + 1} = sum _ {i = 0} ^ {s} a_ {i} y_ {ni} + hk sum _ {j = -1} ^ {s} b_ {j} y_ {NJ},}


was vereinfacht werden kann
- ((1– –b– –1z)yn+1– –∑j=0s((einj+bjz)yn– –j=0{ displaystyle (1-b _ {- 1} z) y_ {n + 1} – sum _ {j = 0} ^ {s} (a_ {j} + b_ {j} z) y_ {nj} = 0 }}


wo z = hk. Dies ist eine lineare Wiederholungsbeziehung. Die Methode ist A-stabil, wenn alle Lösungen {yn} der Wiederholungsrelation konvergieren gegen Null, wenn Re z <0. Das charakteristische Polynom ist
- Φ((z,w)=ws+1– –∑ich=0seinichws– –ich– –z∑j=– –1sbjws– –j.{ displaystyle Phi (z, w) = w ^ {s + 1} – sum _ {i = 0} ^ {s} a_ {i} w ^ {si} -z sum _ {j = -1 } ^ {s} b_ {j} w ^ {sj}.}


Alle Lösungen konvergieren für einen gegebenen Wert von gegen Null z wenn alle Lösungen w von Φ (z,w) = 0 liegen im Einheitskreis.
Der Bereich der absoluten Stabilität für ein mehrstufiges Verfahren der obigen Form ist dann die Menge aller
z∈C.{ displaystyle z in mathbb {C}}für die alle w so dass Φ (z,w) = 0 erfüllen |w| <1. Wiederum, wenn dieser Satz die Ebene der linken Hälfte enthält, wird das Mehrschrittverfahren als A-stabil bezeichnet.


Beispiel: Die Adams-Bashforth-Methode zweiter Ordnung[edit]
Bestimmen wir den Bereich der absoluten Stabilität für die zweistufige Adams-Bashforth-Methode
- yn+1=yn+h((32f((tn,yn)– –12f((tn– –1,yn– –1)).{ displaystyle y_ {n + 1} = y_ {n} + h left ({ tfrac {3} {2}} f (t_ {n}, y_ {n}) – { tfrac {1} {2 }} f (t_ {n-1}, y_ {n-1}) right).}


Das charakteristische Polynom ist
- Φ((w,z)=w2– –((1+32z)w+12z=0{ displaystyle Phi (w, z) = w ^ {2} – (1 + { tfrac {3} {2}} z) w + { tfrac {1} {2}} z = 0}


das hat Wurzeln
- w=12((1+32z±1+z+94z2),{ displaystyle w = { tfrac {1} {2}} { Big (} 1 + { tfrac {3} {2}} z pm { sqrt {1 + z + { tfrac {9} {4 }} z ^ {2}}} { Big)},}


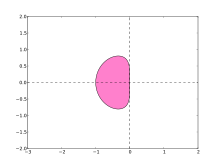
somit ist der Bereich der absoluten Stabilität
-
{z∈C.| |12((1+32z±1+z+94z2)|<1}}.{ displaystyle left {z in mathbb {C} left | left | { tfrac {1} {2}} { Big (} 1 + { tfrac {3} {2}} z pm { sqrt {1 + z + { tfrac {9} {4}} z ^ {2}}} { Big)} right | <1 right. right }.}


Diese Region wird rechts angezeigt. Es enthält nicht die gesamte linke Halbebene (tatsächlich enthält es nur die reale Achse dazwischen z = −1 und z = 0) Die Adams-Bashforth-Methode ist also nicht A-stabil.
Allgemeine Theorie[edit]
Explizite mehrstufige Methoden können niemals A-stabil sein, genau wie explizite Runge-Kutta-Methoden. Implizite Mehrschrittmethoden können nur dann A-stabil sein, wenn ihre Reihenfolge höchstens 2 beträgt. Das letztere Ergebnis ist als zweite Dahlquist-Barriere bekannt. es schränkt die Nützlichkeit linearer mehrstufiger Methoden für steife Gleichungen ein. Ein Beispiel für ein A-stabiles Verfahren zweiter Ordnung ist die oben erwähnte Trapezregel, die auch als lineares Mehrschrittverfahren betrachtet werden kann.[10]
Siehe auch[edit]
Verweise[edit]
- Burden, Richard L.; Faires, J. Douglas (1993), Numerische Analyse (5. Aufl.), Boston: Prindle, Weber und Schmidt, ISBN 0-534-93219-3.
- Dahlquist, Germund (1963), “Ein spezielles Stabilitätsproblem für lineare Mehrschrittverfahren”, BISSCHEN, 3 (1): 27–43, doi:10.1007 / BF01963532, hdl:10338.dmlcz / 103497.
- Eberly, David (2008), Stabilitätsanalyse für Differentialgleichungssysteme (PDF).
- Ehle, BL (1969), Auf Padé Annäherungen an die Exponentialfunktion und A-stabile Methoden zur numerischen Lösung von Anfangswertproblemen (PDF), Universität von Waterloo.
- Gear, CW (1971), Numerische Anfangswertprobleme in gewöhnlichen Differentialgleichungen, Englewood Cliffs: Prentice Hall.
- Gear, CW (1981), “Numerische Lösung gewöhnlicher Differentialgleichungen: Gibt es noch etwas zu tun?”, SIAM Review, 23 (1): 10–24, doi:10.1137 / 1023002.
- Hairer, Ernst; Wanner, Gerhard (1996), Lösung gewöhnlicher Differentialgleichungen II: Steife und differentiell-algebraische Probleme (2. Aufl.), Berlin: Springer-Verlag, ISBN 978-3-540-60452-5.
- Hirshfelder, JO (1963), “Angewandte Mathematik in der Theoretischen Chemie”, Symposium der American Mathematical Society: 367–376.
- Iserles, Arieh; Nørsett, Syvert (1991), Sterne bestellen, Chapman & Hall, ISBN 978-0-412-35260-7.
- Kreyszig, Erwin (1972), Advanced Engineering Mathematics (3. Aufl.), New York: Wiley, ISBN 0-471-50728-8.
- Lambert, JD (1977), D. Jacobs (Hrsg.), “Das Anfangswertproblem für gewöhnliche Differentialgleichungen”, Stand der Technik in der numerischen Analyse, New York: Academic Press: 451–501.
- Lambert, JD (1992), Numerische Methoden für gewöhnliche Differentialsysteme, New York: Wiley, ISBN 978-0-471-92990-1.
- Mathews, John; Fink, Kurtis (1992), Numerische Methoden mit MATLAB.
- Drücken Sie, WH; Teukolsky, SA; Vetterling, WT; Flannery, BP (2007). “Abschnitt 17.5. Steife Gleichungssätze”. Numerische Rezepte: Die Kunst des wissenschaftlichen Rechnens (3. Aufl.). New York: Cambridge University Press. ISBN 978-0-521-88068-8.
- Shampine, LF; Gear, CW (1979), “Die Ansicht eines Benutzers, steife gewöhnliche Differentialgleichungen zu lösen”, SIAM Review, 21 (1): 1–17, doi:10.1137 / 1021001.
- Wanner, Gerhard; Hairer, Ernst; Nørsett, Syvert (1978), “Ordnungssterne und Stabilitätstheorie”, BISSCHEN, 18 (4): 475–489, doi:10.1007 / BF01932026.
- Stabilität von Runge-Kutta-Methoden [1]
Recent Comments