ポジトロン放出断層撮影ウィキペディアの技術
ポジトロン放出断層撮影の技術 陽電子放出断層撮影における形成の形成に寄与する処理ステップと、PETシステムの性能パラメーターについて説明します。

放射性核種の崩壊によって引き起こされる陽電子が発生した場合、両方が破壊されます(消滅)。実質的に180°の角度で互いに除去する2つの光子(ガンマ放射)があります。これ 放射線 同時に、2つの検出器がヒットします(偶然)。その結果、コンピューターを使用することで、陽電子放出の場所を制限できます。 2つの検出器で適切なエネルギーのγ-quantumsが同時に実証されている場合、これは2つの検出器間の線のある時点でポジトロン電子破壊として解釈されます(いわゆる 応答線(lor) また。 Koinzidenzlinie )。陽電子放出断層撮影の手法は、実際のイベントの最高の速度を検出することを目的としており、同時に誤解の速度を低く保つことを目的としています。

シンチグラフィと同様に、患者は、通常は腕静脈に注射することにより、ペット検査の開始時に放射性薬局を投与されます。ペットはポジトロンを放出する放射性核種を使用します(β + -放射線)。体内の電子とポジトロンを相互作用すると、それぞれ511 keVのエネルギーの2つの高エネルギー光子(周波数123 EHzと波長2,43 pmに対応)が反対方向に放出されます。 PETデバイスには、光子のために患者の周りに形状に配置された多くの検出器が含まれています。 PET検査の原則は、2つの反対の検出器間の一致を記録することです。証明への参照の典型的な時間窓は4.5〜15ナノ秒です。これらの登録された減衰イベントの時間的および空間的分布から、身体内の放射性医薬品モニターの空間分布と一連の交差画像が計算されます。ペットは、腫瘍学、神経学、心臓病学における代謝関連の問題で頻繁に使用されると感じています。
スペクトルに対する利点 [ 編集 | ソーステキストを編集します ]
個々の光子放出断層撮影(SPECT)の場合、測定する光子の放射方向を決定するためにコリメーターが必要です。これは光子の大部分を隠しているため、10,000個の放出光子のうち約1個のみが検出されます。一方、ペットでは、偶然の測定原理は物理的なコリメーションを省くことができ、郡の収量につながり、より高い画像品質と空間分解能を備えた画像統計が改善されます。 [初め] 測定された光子の吸収は、輝く組織の厚さにのみ依存しますが、光子の位置には依存しません(測定データの補正、吸収補正セクションを参照)。これにより、調査ボリュームでトレーサー分布の正確な定量化が可能になりますが、これはスペクトルでは不可能です。 [2]
実証される絶滅放射線のエネルギーは、X -Ray診断で使用されるX線スペクトルの最大エネルギーよりも大きくなります(コンピューター断層撮影では最大150 KEV)。したがって、物質との相互作用の確率は比較的低いです。これは、放射線保護の側面から、ポジティブな品質をもたらしますが、証明すること、したがってイメージングを証明することを困難にします。
理想的なペット検出器 [ 編集 | ソーステキストを編集します ]
理想的なペット検出器は存在しません。次のプロパティが望ましいです。
- 調査の対象を完全に囲みます。
- すべての入射光子を完全に吸収します。
- 彼は、入射光子の位置を正確に登録します。
- 偶然のイベントを検出した後、彼は次のイベント(低いデッドタイム)を非常に迅速に登録することができ、したがって、最高のカウント率であってもパフォーマンスを失うことはありません。
- 検出器の検出器は、消滅の時間を正確に決定するため、消滅光子の飛行時間差を通じて消滅の正確な場所を決定できます。
- 偶然の時間ウィンドウは非常に小さく、ランダムな偶然(=ランダム)は役割を果たさない。
- 検出器は、光子の発生方向を決定できます。したがって、問題の検出器の数が対応する2番目の光子に対して厳しく制限されているため、ランダムは大幅に減少します。
ペット検出器のシンチレーターに理想的な材料はありません。次のプロパティが望ましいです。 [3]
- 高感度のための高線形弱化係数µ。
- 光電子のみであるが、コンプトン光子が検出されないため、高い写真派fact。
- 高いカウント速度での少数のランダムな偶然のためのシンチレーションの短いクールダウン時間。
- 光電子増倍体の良好なエネルギーのボイドのための軽くシンチレーション。
- 弦放射の明確な区別のための検出器材料の良好なエネルギー解像度。
- 光電子変化の適切な検出可能性のために、400 nm近くのシンチレーションの波長。
- シンチレーション波長の光子に対して透明。
- クリスタルから光電子増殖器までの良好な光の交差については、1.5近くの屈折指数。
- 高用量荷重で安定した性能のための放射祭。
- 単純なパックの非groscopic。
- 生産が安価。
- 単純な取り扱いとより小さなクリスタルの寸法に堅牢です。
- 低回復作業に対する一定の感度。
本物のペット検出器 [ 編集 | ソーステキストを編集します ]
ジオメトリ [ 編集 | ソーステキストを編集します ]

PETの初期には、偶然に接続されたNaj-Sintillatorを伴う二重頭のガンマカメラの頭の間の共産業が測定されたシステムが生産されました。ただし、これらのシステムの感度は、フルリングペットシステムよりも劣っていたため、勝つことができませんでした。
最初のフルリングペットには1つの検出器リングしかあり、最新のシステムがあり、いくつかのリングが今日並んで配置されているため、システム全体の感度が向上します。
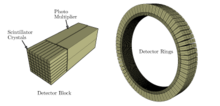
現在入手可能なPETスキャナーの検出器は、いくつかの検出塩で構成されており、それぞれが30〜40の検出器モジュールで構築されています。検出器モジュールは、4〜8個の検出器ブロックで構成されています。
検出器ブロックは、いくつかの個別の結晶で構成されています(たとえば、配置4×4、4×5、または6×6)。結晶の寸法は、横軸方向に6〜8 mmの範囲で移動します。
放射状の方向 – つまり、光子の方向 – 結晶の厚さは通常20〜30 mmです。合計で、これにより、約10,000個のリング型検出器結晶(シンチレーションカウンター)が生じ、これは約1000個の光電子栽培と結合されています。一連のシンチレーションクリスタルの「ルックス」にある光電子栽培のブロックが1986年に導入され、それ以来証明されている構造の原則があります。 [4]
検出器の軸方向の視覚領域 – フィールドオブビュー(FOV)とも呼ばれます – は、約15〜30 cmの範囲です。検出器リングの直径は、デバイスに応じて約50 cmから約85 cmです。
Kristallmaterial [ 編集 | ソーステキストを編集します ]
今日の臨床ペットのすべてのシステムは、ドイツ語の「Bgo」を検出材料として使用しています(bi 4 ge 3 o 12番目 )、私の神話 3+ Lutetiumytttrium oxoorthosilicat( “lyso”、luysioなどの文書化された接続 5 :これ 3+ )oder lutetiumoxyorthosilicat( “lso”、lu 2 そうではありません 5 :これ 3+ )。
LSOとLYSOのより短いサブスクライバーは、クリスタル材料BGOで可能なよりも大幅に偶然の偶然の時間窓を持つPETシステムを有効にします。偶然の時間ウィンドウが小さくなると、測定されたランダムな一致の数が減り、このようにして信号ラッシュ比が改善されます。ただし、LSOとLysoは、生産中のBGOよりも(現在)大幅に高価です。 BGOの感度と光画分は、LSOおよびLysoの感度よりも大きいです。 1980年代以降調査されてきた飛行時間ペットシステムの構築は、BGOでは不可能です。 TOFに必要な時間分解能に到達することはできません。市販のすべてのTOF PETシステムは、LSOまたはLysoを結晶材料として使用しています。数年前まで、メーカーはまた、検出器材料としてガドリニウムオルトシリカット(GSO)を使用していました。
SyntillationsNachweis [ 編集 | ソーステキストを編集します ]

シンチレーション結晶はのこぎりであるか、いくつかの結晶が接着されています。結晶の境界には、検出器の方向に操縦される光子の反射があります。これにより、均質な個々のクリスタルブロックよりも正確な位置が可能になります。 Photomultiplierは、2010年頃まで臨床PETシステムでこれに使用されていました。これは、当時の非常に弱い光の閃光のための最も敏感な検証器でした。いくつかの光電子充填剤は、シンチレーション結晶のグループを「一緒に見て」、直接またはシンチレーションクリスタルとの軽いはしごを介して接続されています。シンチレーションのローカリゼーションは、光電子豊富さに登録されているシンチレーションの明るさを動かすことにより、怒りカメラの原理に従って配置されます。

Photomultiplierは、2010年代後半に半導体検出器にますます置き換えられました。 2020年代以来、フォトンアバランチダイオードまたはSIPMを歌うという形での雪崩フォトドード(英語の シリコン光電子充填剤 )使用すると、Photomultiplierはエントリクラスデバイスにのみ使用されました。 SIPMにより、高度な時間分解能が可能になります。これは、飛行時間テクノロジーに不可欠です。光電子拡大とは対照的に、それらは磁場にも鈍感であり、PET-MRデバイスはこれらの検出器でのみ構築できます。 [5] [6]
欲望と現実:何を測定したいですか、そして何を測定しますか? [ 編集 | ソーステキストを編集します ]
一致放射は、検出器への途中で散らばって吸収される可能性があります。証拠に対する100%の感受性を持つ検出器はありません。検出器には測定の時間が必要であり、偶然のイベントを把握するだけの保証もありません。
以下では、偶然の放射線のカウントと位置にどのような効果が発生し、どの入場、修正、再構成プロセスが画像の劣化を維持するために試行されるかについて説明します。 [7]
真の偶然( “Trues”)
ペットの目的は、「秘密」のみを測定することです。 a 真実 2つの光子が作成された場合、調査ボリュームは相互作用なしで交差し(スプレッド)、検出器に完全なエネルギーを堆積させ、その後測定電子機器によって認識されました。その要件a 真実 測定できます:
- 両方の光子の飛行方向は、検出器の視覚領域にあります。
- (患者で)散乱によりエネルギーがあまりにも多くない光子はありません。そのため、両方が検出されます。
- 吸収によって消滅した光子はいません。
- システムの検出器は、それらを証明するのに十分敏感です。
- システムの検出器は、シンチレーション時の以前のイベントによってブロックされません(したがって、致命的な時間)。
それが優れたデバイスデザインの目標であるに違いないことは明らかです。 脅かす 取得する。特定のアクティビティを伴う秘密の数が多いほど、ペットはより敏感です。
の数 脅かす 次のように増やすことができます:
- 核化活性の増加:しかし、これはまた シングル したがって、 ランダム 。
- 患者の直径が低く、光子の散乱でもあります( 散乱 ) 削減
- 記録時間の増加
- 検出器で覆われた大きな室内角度
- 検出器は、予想されるエネルギーの周りに狭い測定範囲を持っています
- 検出器結晶の証拠に対する高感度
- 検出器エレクトロニクスの検出に対する高い感度
カウント率の増加に伴い、検出器クリスタルと検出器のエレクトロニクスのデッドタイムは重要性を獲得します。活動が増加すると、登録された偶然のイベントがさらに続く可能性が増加するためです。
個々のイベント( シングル ))

シングル 望ましくない出来事の1つです。作成された2つの光子のうち1つだけが検出できる場合に発生します。 2番目の光子の検出の喪失の理由は次のとおりです。
- 2つの光子のうちの1つは、検出器の「視認性エリア」を離れます(視野、FOV)
- 2つの光子のうちの1つは、検査量(患者)に散在しています。関連する方向の変化は、光子が検出器のFOVを離れることにつながる可能性があります。ただし、光子は散布によってエネルギーを失います。散布後に検出器を満たしている場合、残り物が検出器のより低いエネルギー波を下回ると拒否されます。
- 2つの光子のうちの1つは、検査量(患者)に吸収されます。
- 2つの光子のうちの1つは、検出器に彼のエネルギーの一部のみを検出器に浸透させることができます。この場合、光子は解釈され、散乱として拒否されます。
- 2つの光子のうちの1つは、当時以前の衝動を処理するのに忙しい検出器に会います。測定電子機器は、2つの同時またはほぼ同時のインパルスを記録することができず、2番目または両方のシンチレーション(=測定システムのデッドタイム)を拒否します。
シングルの原因の説明は、数を最小限に抑えるための可能性は限られていることを示しています。これらは:
- 視野の大きなフィールド、または一致検出器の多数、したがって高い空間カバレッジ。
- 迅速な検出電子機器の使用は、デッドタイムの影響がほとんどないことを示しています。
- 少数の光子を「見落とす」だけの高感度を持つ検出器の使用。決定的な因子は、検出材料とシンチレーション結晶の厚さです。臨床PET/CTシステムの検出器は、すべての入射光子の約80〜95%を検出できます(システムによって異なります)。
aになります 独身 そのように認識されているように、それは拒否され、形成に貢献していません。
ランダムな偶然( ランダム ))

ランダムは望ましくない出来事の1つです。
一致ウィンドウ内で偶然の一致で接続された2つの結晶で2つのシンチレーションが検出された場合、それらは消滅として解釈されます。
ただし、2つのシングルが登録される可能性があります 違う 調査ボリュームの場所 偶然にも 同時に作成されました。ただし、この場合、これも誤って消滅として解釈され、画像の再構成に入ります。
ランダムな一致の起源の確率( ランダム )削減できます:
- 低い適用核種用量、
- 小さな偶然の窓、
- 多数の検出器、
- 測定されたシングルの数を減らすことにより(例:SEPTA = 2D録音モードを使用すること)
- 「飛行時間」のデータ収集技術を使用します
測定されたランダムの数は、シングルの数が増えるにつれて大幅に増加します。
散在する一致( 散乱 ))

弦放射は望ましくないイベントの1つです。光子が検出器に向かう途中で散らばっている場合、その方向は変わります。ただし、ペットの場所は常に同時に発生した2つのイベント間の直線ルートに基づいているため、これは誤りにつながります。しかし、光子は散乱のためにエネルギーを失います。したがって、弦の放射は、検出器内の特定のエネルギー波を超える場合にのみ、シンチレーションをカウントすることにより隠すことができます。したがって、より低いエネルギー波の使用は、抑制散乱する一致の効果的な方法です。ただし、このアプローチは、検出器の有限エネルギー分解能によって制限されます。
ただし、分離壁(「セプト」)またはエンドシールドを使用することにより、弦の放射を減らすこともできます。ここでは、測定量から来ない散乱光子は検出器にさえ来ません。
臨床診療における2Dから3Dから3Dの取得への移行と、関連するセプタの喪失には、弦放射の割合が大幅に増加します。このため、補正アルゴリズムを使用してストリームの割合を排除するためのさまざまなアプローチがあります。 [8]
すでに説明されているように、あなたは偶然の一致を記録するときに、いくつかの望ましくない副作用に直面しています。検出器システムは、パフォーマンスパラメーターと部分的に矛盾する必要があります。さらに、明確にされる質問は、測定データの記録または処理方法を決定します。
それぞれの目的で最適な結果を達成するために、特別な取得モードが開発されました。
静的データ記録 [ 編集 | ソーステキストを編集します ]
最も頻繁に使用される録音モードは、静的記録です。一定期間中に同じ記録位置に表示されるすべてのイベントは、画像の再構成に使用されます。通常、FDG PETの場合、記録ポジションごとに2〜4分間にわたって獲得されます。記録が長くなるほど、画像の再構成に使用できる偶然の一致の数が大きくなり、信号信号関係に関して画質が向上します。一方、記録期間の拡張は、調査の対象の任意の生理学的運動を通じて、動きのアーティファクトの可能性を高めます。
静的な入場は、入院時に豊富なトレーサーの量に関する情報を提供します。濃縮の速度を評価することはできません。これには動的な獲得が必要です。
動的なデータ記録 [ 編集 | ソーステキストを編集します ]
静的な入場と同様に、偶然のイベントの総数は追加されませんが、活動濃縮のコースが考慮されます。速度、すなわちH.濃縮のダイナミクスは、病変の種類または重症度について結論を引き出すことができます。動的記録プロセスは、その中にあります。受容体シンチグラフィ(神経学)または心筋灌流の評価への応用。
動的な研究は、マルチフレームデータセットで構成されています。静的な入場とは対照的に、一連の画像は、異なる記録位置のシーケンスを示していませんが、同じ記録位置のさまざまな時間窓、例えばB.フレーム1:0〜15秒、フレーム2:15〜30秒など。
トリガーされたデータ記録 [ 編集 | ソーステキストを編集します ]
これは、動的なデータ記録の特別な形式です。呼吸と心拍は、ペットの記録中に抑制できない患者の動きです。したがって、適切なデータ収集を使用して、関連する画像アーティファクトを排除することをお勧めします。
トリガーされたデータ収集では、完全なサイクル(ハートビートまたは呼吸)が測定システムによって記録され、記録された生データは(例:8〜16)グループ(SO -CALLED GATESまたはBINS)に分割されます。入場後、それらは要約に再構築されます。結果は、動きの1つの相のみを示す画像(EKGトリガーの際の末期または末端拡張期相、呼吸の息吹が息を吸った場合の吸気または末端栄養相)を示し、ぼやけたアーティファクトはありません。臨床研究は、手順の診断的な付加価値を示しています。
肺回路の尊厳の評価は、呼吸器の数値、ECGの組み合わせによる心臓の記録の質、および呼吸誘発のトリガーを使用することにより、明らかに改善されます。 [9] [十] [11]
3D録音モード [ 編集 | ソーステキストを編集します ]

ここでは、同じdeTekorring内の偶然の一致だけでなく、異なる探知の間でもチェックされています。 3Dレコーディングモードは、今日のデバイスで最も頻繁に使用される録音モードです(2010年現在)。多数の臨床PETおよびPET/CTシステムの場合、それは唯一の利用可能な記録モードでもあります。
多数の検出器のイベントは3Dレコーディングモードで考慮されるため、これにより、検出器とデバイスの電子機器の主要な要件があり、イベントで数回登録できる必要があります。純粋な3Dモードは、軸方向の方向の不均一な感度にもつながります。軸のFOVの中央では、把握された偶然の空間角は端よりも大きく、ほぼ厳密に放射状の一致のみを測定できます。とにかくすべての検出器へのすべての検出器の偶然は実装できないため、この効果はマージされた検出器の熟練したグループ化によって減少しますが、完全に排除することはできません。
3Dレコーディングモードでは、検出器は重度の弦放射にさらされ、検査量が増加し、用量性能が増加すると、画質がますます悪化します。ストリームの割合はu。A。 ATは、光子の経路の長さ – したがって、2つの光子のうちの1つの散乱/吸収の確率が、厳密に放射状の通過の場合よりもテスト容積を通じて斜めに大きいためです(ここでは、放射状:検出器の方向、患者の頭/足への検査容積から)。
3Dモードでの総カウントレートは、スラントコンセブリも記録されているため、2Dモードよりも8の係数です。ただし、同時に、ストリーキングの割合は、約10%から35〜45%に3倍に増加します。したがって、実質測定された一致の純利益は、対応する奇妙な偶然の一致線が存在しない場合、検出器の軸端にあるレイヤーの因子5のほぼほんの5つです。したがって、そこにある信号ラッシュ比は、2Dレコーディングモードよりもさらに著しく悪化しています。これが、3Dモードの録音を2Dモード(約2%)よりも大幅に高い層のオーバーラップ(25〜40%)で実行する必要があるもう1つの理由です。
スプレッドの割合が大幅に増加しているため、画像の再構築、デクターの正規化、および補正アルゴリズムの弱体化で使用されるスケール修正にも著しく高い要求があります。特に3Dスキャナーの初期には、2Dモードと比較して、画像の再構築時間(30分以上)が大幅に長くなりました。高いパフォーマンスコンピューターハードウェアが利用できるため、この問題は近年排除されています。 [12番目]
2D録音モード [ 編集 | ソーステキストを編集します ]

3Dモードに加えて、いくつかのデバイスにはまだ2D録音モードがあります。イベントのみが、同じ検出orringの結晶で発生する偶然の一致をチェックされます。 「電子」と「リアル」2Dモードとの間で区別されます。
「リアル」2D録音モードでは、Wolframseptesがガントリーに駆動され、厳密に放射状の原点ではない光子を停止します。 「電子」2Dモードでは、偶然の一致テストをオフにすることにより、同じリング内の一致のみがチェックされますが、放射自体は検出器の「目に見える」ままです。電子および「リアル」2Dモードは、視野上の感度の一流の均一性につながります。
タングステンの浸透とエンドシールドによる「実際の」2D記録モードの奇妙な光子からの物理的フェードは、検出器によって「見られる」「見られる」イベントの数を大幅に減らします。したがって、この記録モードは、弦放射の抑制に非常に効果的に使用できます。検出器は放射状の方向から「表示」するだけなので、測定されたイベントがランダムに誘導される可能性も3D記録モードよりも少ない。過負荷イベントのため、当然、望ましくない普及イベントだけでなく、実際の偶然も検出器から遠ざけられています。 2Dモードでのスキャナーの感度は、3Dモードのそれの約20%に過ぎませんが、拡散の割合も減少します。 40%から約10%。
LSOベースのPETシステムがリリースされる前に、すべてのPETスキャナー2Dスキャナーがありました。 「高速」クリスタル(LSO/LYSO)のPETシステムには、通常、「実際の」2D録音モードがありません。メーカーでは、約5 nsの大幅に小さい偶然の偶然の時間枠が、BGOスキャナーの約10 nsと比較してランダムな偶然の発生を効果的に抑制すると主張されました。
調査容積が大きく、多数の野良イベントが予想される場合、2D記録モードが使用され、注入された核化用量が高く、ランダムな偶然の発生も増加しました。後者の場合、これらの録音のカウント統計はとにかく非常に良好であり、画面のブランキングの利点は感度の低下を超えるため、感度の低下はそれほど激しくなりません。 SEPTAの使用により、カウントレート(NECR)が劇的に減少しているため、このモードは非常に短寿命の核種のイメージングにも理想的でした。
General ElectricのBGOベースのDST-Eシリーズのデバイスは、まだ実際の2Dモードを持っていた最後の臨床システムでした。 2008年秋のEANMにも拠点を置いた後継者モデルDiscovery 600は、3Dレコーディングモードのみを備えています。製造業者は、望ましくない弦放射の効果は、より強力な電子機器とその反復再建メカニズムの助けを借りて効果的に抑制できると考えています。 [13]
飛行時間 [ 編集 | ソーステキストを編集します ]
TOF測定は、両方のガンマ量子の会議間の時差を測定します。これにより、応答ラインの過程について声明を作成するだけでなく、このラインで行われた消滅の位置を決定できます。 2000年代の終わりに最初のデバイスで一般的だったように、600人のピコースの顧客の時間的解像度では、9 cm FWHMの精度で消滅の位置を決定できます。これらのフレームパラメーターを使用すると、2010年に可能な限り最高のデバイス設計、小さな病変サイズ、患者の直径が40 cmの制限が50%の利益であり、信号狂乱の利益は50%でした。したがって、TOF測定により、信号狂乱距離が改善されます [14] [15] そして、達成可能な解像度。実際の2Dレコーディングモードとは対照的に、この利益は、感度を失うことなく信号ラッシュを信号ラッシュにするために行われます。
時間分解能の改善により、信号ラッシュ比を増加させることにより、画質をさらに向上させることができました。飛行時間テクノロジーを備えたスキャナー(2021年)には、約250人のピコース顧客の時間的解像度があります。 [16] ただし、これは開発の終わりではありません。 2021年に公開された出版物では、時間分解能が32ピコース秒に増加したデザインが説明されています。これは、光子の方向への消滅の位置を4.8 mmに正確に決定できることを意味し、断層撮影画像再構成サルゴリズムとランダムな一致の修正の両方を分配できることを意味します。 [17]
言及された影響により、測定されたデータは異なるエラーの影響を受け、したがって画像の再構成の前に数回修正する必要があります。
吸収補正

Gammakカメラの排出データの吸収補正はまだ受け入れられることはありませんが、調査オブジェクトを横断するときに放射線が1〜2階建てのサイズによって弱くなるため、画像の再構築と濃縮の定量化のためにPETが不可欠な必要性です。吸収補正は、PETデータの画像再構成で使用されるすべての補正の中で最大です。 [8]
説明:
直径30 cmの水で満たされたシリンダーの近くにある核化濃縮を想像してください。
核化はそこで崩れ、すべてのスペースに絶滅放射線を送ります。
2つのケースを考慮する必要があります。
ケース1:1と2を作成した2つの光子は、オブジェクト表面(紫色の矢印)から正確に接線方向に飛びます。光子1も光子2もシリンダーのどの部分にも浸透しません。
ケース2:Photon 1は、シリンダーの中央に向かって放射状に向けられます。当然、Photon 2はシリンダーの一部でさえ貫通せずにシリンダーから離れて移動します(Reddoor Arrowは上向きに向かっています)。確率は、Photon 1が走行中に30 cmの水を吸収するため、Photon 2が「単一」になるため、画像の再構築に使用できなくなることです。
画像の再構築における放射の吸収が無視された場合、アーティファクトが結果になります。測定された活動分布は、吸収補正なしで実際の分布と一致しませんでした。
濃縮の定量化との関連性:
吸収の可能性は、表面(位置A)またはオブジェクトの中央(位置b)が発生したかどうかに関係なく、ケース2(赤い矢印)にあります。
表面上の消滅の場合(位置A)、光子1はシリンダー全体を通過し、光子2のみの空気を走り、シリンダーの中央(位置B)に消滅すると、両方の光子が半シリンダーを通過し、同じ吸収の可能性をもたらします。
吸収の確率は放射体積の全体的な弱体化にのみ依存するが、偶然の一致線の消滅の位置には依存するため、これにより核濃縮の深い非依存定量化が可能になります。
PETでの吸収補正:
2003年までに構築された純粋なペットシステムでは、ロッド源の助けを借りてペットの排出データが弱体化しました。 [7] この目的のために、これらは調査の対象の周りに導かれ、コンピューター断層撮影と同様にトモグラムが作成されました。これは高価で時間をかける手順でした。排出測定に加えて、排出測定に加えて約3分間の透過測定が必要でした。
それに使用されるもの 68 ソースはバラバラになりました。これは、時間の経過とともに、補正の弱体化の質を悪化させるだけでなく、一定のコスト係数を表しています。
PET/CTでの吸収補正:
今日のPET/CTシステムでは、CTデータを使用して補正が弱くなっています。最新のCTを使用したフルボディレコーディングには30秒以上かかることはないため、このプロセスははるかに正確であるだけでなく、かなり高速です。
コンバージョンテーブルの助けを借りて、エネルギーのガンマ放射について、コンピューター断層撮影カットのHununfield値に関連する線形弱体化係数µが割り当てられます511 Kev。
ただし、その前に、CTデータはセグメント化されています。
測定されたデータは滑らかになり、ホスフィールドの値は切り上げられ、水、骨、空気の固定衰弱値に丸められます。
これにより、画像ノイズの補正が低下するのを防ぎます。
コンピューターの断層撮影はしばしばX -Rayコントラスト剤を使用して吸収されるため、これは一部のデバイスの画像アーティファクトにつながる可能性があります。金属製のインプラントは、CTの画像再構成だけでなく、補正の弱体化、したがってペット画像の画像再構成も妨げることができます。
ランダムの修正
説明したように、ランダムな一致の数はさまざまなパラメーターに依存し、非常に高い値を受け入れることができます。したがって、測定されたカウント率はランダムから差し引かれなければなりません。
ランダムな一致の速度を測定するための2つの異なる手順があります。
- シングルの数を測定し、ランダムの予想数を計算するか、レートから計算します
- 実際の(真)ランダム(ランダム)を含む偶然の測定の後、2番目の対照的な、同様に大きな時間枠を含むことができない等しく大きな時間枠。この2番目の時間ウィンドウの測定は、実際の偶然のイベントによってトリガーされなかったため、偶然の偶然はランダムな偶然でなければならないと判断されました。
時間補正
カウント率の増加に伴い、測定システムのデッドタイムは重要性を獲得します。非常に高いカウント率で、測定されたカウント率は最終的に実際のカウント率から非常に逸脱しているため、この偏差は修正する必要があり、測定の正しさを受け取りたいと考えています。
実装は簡単です。アクティビティが高まるキャリブレーションシリーズを作成します。この既知のアクティビティは、参照メーター(ボアホールなど)を備えた希釈型で測定され、それぞれの活動に有効な補正係数が計算されます。
弦放射の補正
弦の放射は、大規模なアクティビティの領域または重度の弱体化のあるオブジェクトの近くで発生します。
補正関数は、ファントム測定を使用した測定の観点から決定するか、データの弱体化の関与で計算することもできます。 [8]
回復補正
システムの空間分解能は、病変の測定された活性も決定します。システムの空間分解能の4倍未満の病変は、取り込みの減少とともにこの補正なしで示されます。偏差は、回復係数(ホットスポット回収係数HSRCおよびコールドスポット回復係数CSRC)の助けを借りて修正されます。システムの1.5倍の解像度に対応する病変サイズまでの手順は、良好な結果をもたらします。小さい病変の場合、高度に拡大したノイズの割合により、統計誤差が大きすぎます。ホットスポットリカバリ係数は、SystemLinearityのテストとしても使用できます。 [2]


画像の再構成は、分析と診断の基礎である複数の修正された測定データから画像を作成します。
ろ過された拒絶
フィルタリングされたバック投影(フィルタリングされたバックプロジェクションのFBP)は、今日のコンピューター断層撮影で主に使用されている手順です。ペットでは、現在、反復再建プロセスに置き換えられています。
反復的な2D再構成
数学と同様に、これは同じアルゴリズムを繰り返すことで解決策に徐々にアプローチする方法です(ラテン語から iter “ステップ”)。
2D手順は、MLEM、OSEM、またはAW-OSEMと呼ばれます。
これらの方法はすべて、受け入れられたトレーサー分布から始まります。これは、比較と修正により、各計算で実際の状況に近似されます。おおよその手順は次のとおりです。
- イメージングシステムの特性を考慮して、想定されるトレーサー分布のレトロディジェクション:モデルのようにトレーサーが分布する場合は何を測定しますか
- 拒否されたデータと測定データの違いの決定
- 差から得られた補正係数の計算と適用
- 解体基準に達するまで、前の手順を繰り返します。
再構築されるデータが3D取得で測定された場合、それらは以前にフーリエバインニングによって変換され、言及された2D手順を再構築できます。
すべての反復手順は、それらが非常にコンピューティングであることを意味します。原則として、反復的な再構成プロセスではすべての解像度を実現できますが、画像ノイズが強化されることが多く、丸めエラーが増加しているため、さらなる反復が画質を悪化させます。
反復的な3D再構成
反復的な3D手順は長くありませんでした。 2D手順では、すでにフィルター処理されたバックプロジェクションの約10倍のコンピューティング能力が必要であり、この事実により数年間しか使用されていません。
基本原理は2D再構成のそれと同じですが、反復的な3Dメソッドは数学的に非常に厳しいものです。 2007年には、3D識字手順Ramla(Philips)とVuepoint(General Electric)がペットで使用されました。
SNM 2007では、General Electric and TruePoint HD(Siemens)によるVue Point High Definitionで、新しい反復3D再構成プロセスが提示されました。
Vue Point High Defionisは、信号信号ラッシュを約60%改善し、臨床条件下で3.5 mm未満の解像度を可能にします。再構築の特徴は、反復ループ内のすべての修正を処理し、したがって以前の反復手順の収束問題を解決することです。
TruePoint HD Reconstruction(Siemens)は、ポイントスプレッド関数に基づいています。検出器の画像特性はモデル化され、修正されます。 Siemensは、実験室条件下でTruePoint HDを使用して最大2 mmの解像度を達成することを示しています。 [18]
反復画像再構成サルゴリズムを使用すると、システムのイメージング特性を画像再構成で考慮することができます。このようにして、ストリーキングの割合を減らすことができ、信号ラッシュ比が改善されます。 [8]
重要なパフォーマンスパラメーターは、常に質問によって決定されます。
転移を検索するとき、ペットは低活性と活動の摂取量の増加を表すことができなければなりません。
一方、核心臓病では、活動の前での摂取量の減少の表現が重要です。
一般に、異なるトレーサー分布の周囲を備えた小規模および大きな領域は、PETによって正しく識別および定量化する必要があります。
次のパフォーマンスパラメーターは、システムがこれらの要件をどの程度適切に満たすことができるかを説明しています。
感度 [ 編集 | ソーステキストを編集します ]
ペットスキャナーの感度は、画質と記録時間を決定するため、最も重要なデバイスプロパティです。 [19] 。
感度は一般に、本当に肯定的なネガティブイベントと偽のネガティブなイベントの合計に関連する本当に肯定的なイベントの総数を定式化します。 PETでは、感度は1秒あたりのパルスの数(Trues)であり、BeckerelおよびMillilitersごとに測定されます。
彼女は通常入っています
与えられた。注入されたサンプルの活性を測定する場合、ボアホールは証明できると想定されます。良いカウント統計は、良質の写真を再構築するための基本的な要件です。ペットが注入された用量からできるだけ多くの虚偽を決定できる場合にのみ達成できます。優れたシステムは7〜9の値に達します
 与えられた。注入されたサンプルの活性を測定する場合、ボアホールは証明できると想定されます。良いカウント統計は、良質の写真を再構築するための基本的な要件です。ペットが注入された用量からできるだけ多くの虚偽を決定できる場合にのみ達成できます。優れたシステムは7〜9の値に達します
与えられた。注入されたサンプルの活性を測定する場合、ボアホールは証明できると想定されます。良いカウント統計は、良質の写真を再構築するための基本的な要件です。ペットが注入された用量からできるだけ多くの虚偽を決定できる場合にのみ達成できます。優れたシステムは7〜9の値に達します 。 PETでは、システムの感度は、写真群と探偵材料の吸収係数、検出法、結晶の厚さに依存します。システムの感度は、軸FOVを拡大することで大幅に改善できます(追加の検出による拡張)。ただし、これには斜めの試験音量を通過する偶然も含まれているため [20] 。
 。 PETでは、システムの感度は、写真群と探偵材料の吸収係数、検出法、結晶の厚さに依存します。システムの感度は、軸FOVを拡大することで大幅に改善できます(追加の検出による拡張)。ただし、これには斜めの試験音量を通過する偶然も含まれているため [20] 。
。 PETでは、システムの感度は、写真群と探偵材料の吸収係数、検出法、結晶の厚さに依存します。システムの感度は、軸FOVを拡大することで大幅に改善できます(追加の検出による拡張)。ただし、これには斜めの試験音量を通過する偶然も含まれているため [20] 。 散乱 [ 編集 | ソーステキストを編集します ]
これは、測定された一致の合計における散乱とランダムの一致の割合です。スプレッドの割合が低いほど、画像のコントラストが良くなります。放射容積の厚さは、弦放射の割合を大幅に決定します。したがって、脂肪患者の記録は、スリムな人々のスキャンよりも詐欺的です。
ロッドの割合を次のように減らすことができます。
- 飛行時間テクノロジーの適用
- 強力な反復画像再構成の使用
- セプタおよびエンドシールドからの弦放射のシールド。これらは、検出器の端にある検出器に取り付けられたブラインドです。欠点:セプトはシステムの感度を低下させます
- 小さな偶然の時間枠
- 検出器の良好なエネルギー分解能は、散乱した光子と非散乱光子を良好な区別を可能にします(スプリンクされた光子には511 keV未満のエネルギーがあります)。
空間解像度 [ 編集 | ソーステキストを編集します ]
PETシステムによって達成できる空間解像度は、FWHMで与えられます。次の要因によって制限されています。
シンチレーションクリスタルのサイズ:
測定量に面した個々の結晶の面積が小さいほど、検出器システムの溶解が良くなります。ただし、結晶が小さくなると感度が低下し、検出器の数が多いほどシステムコストが増加します。
共線エラー:
光子は正確にコリニアーで作られているのではなく、理想的な180度の角度に小さな偏差があります。原因は、陽電子が放射線前に移動したことです。通常、光子の衝撃角度は再構築時に測定できないため、再構成は回答ライン(LOR)であると想定する必要があります。このSO -Called Colinearity Errorは回避できます。臨床PETシステムの侵入角を測定する検出器は、開発段階および動物試験のための前臨床PETシステムですでに市販されています。いわゆるPhoswich検出器は、サンドイッチ構造で2つの異なる探知材料が互いに上に配置されているエラーを修正するために使用されます。

ガントリーの直径:
ガントリー径が大きいほど、陽電子放射の共線性誤差の影響が増加し、最大達成可能な解像度が減少します。
小さなガントリーの直径は、FOVの中央で達成できる解像度を増加させますが、写真の中心の外側の解像度の不釣り合いに強い低下につながります。FOVの中心の外側にある一致、検出器にさらに進むほど、ガントリームピウムからの放射状の方向になります。検出器には、登場することからのコンパクトな光の閃光はありませんが、その正確な位置を決定できません。
ミディアムフリーウェイの長さ:
ポジトロンは、作成直後に電子で全滅するには速すぎます。したがって、彼らは創造の場所から短いルートを除去し、それにより、他の粒子との相互作用によって常にエネルギーを失います。消滅まで覆われた距離は、周囲の中央の材料密度とポジトロンの初期エネルギーに依存します。したがって、使用される放射性核種に依存します。このように覆われた中程度の自由ルートは、組織内の0.5ミリメートル、肺の1.5ミリメートルのサイズです。 [21]
シンチレーションのローカリゼーション精度:
怒りの原理の助けを借りて、シンチレーション位置の検出器のサイズとローカリゼーションの精度は、クリスタルのシンチレーションのローカリゼーション精度を約2ミリメートルに制限します。
スムージングフィルター:
画像再構成サルゴリズムで使用されているスムージングフィルターは、画像ノイズを減らすために約2〜5ミリメートルの解像度を減らします
表示マトリックス:
使用されるプレゼンテーションマトリックス、つまりH.画像のピクセルサイズは、画像の解像度を減らします。
生理学的患者の動き:
とりわけ患者の動き。患者の呼吸運動によって引き起こされると、最大50 mmの画像情報が塗りつぶします。
言及されたぼやけの数値は、単に合計するのではなく、エラーの繁殖規則に従ってオーバーレイする必要があります。画像の中央では、写真の中央で3〜6ミリメートルのシステム解像度に到達できます。
ノイズ等価カウント率、NECR [ 編集 | ソーステキストを編集します ]
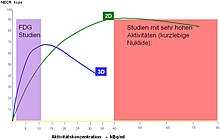
一連の実験でペットのアクティビティをほとんど測定し、ゆっくりと増加する場合、次の画像の結果は次のとおりです。
測定された真の一致の数は、最初は用量とともに増加します。ただし、ランダムに共感は、アクティビティの増加に伴って線形(同じ場所の正方形)を超えて増加します。最終的には、2つのランダムイベントが偶然の時間ウィンドウ内で発生する確率が増加するため、最終的には真の偶然の数(Trues)よりも大きくなります。
さらに、デッドタイムエフェクトも自分自身を作ります [7] クリスタルとエレクトロニクスは、シンチレーションを把握するために固定期間を必要とするため、顕著です。次のイベントがこの期間に行われる場合、それは記録できず、拒否されます。
画質の場合、これは次のことを意味します。
非常に小さく測定されるアクティビティでは、測定されたイベントの数が低いため、画像は非常にうるさいです。アクティビティが増加すると改善されますが、ある時点で最大に達します。別の用量の増加により、画像のコントラストが強い喪失につながり、写真は再びなります。 [7]
NECR(=ノイズ等価カウントレート)は、ペットのこの特性を説明しています [7] :
と
 と
と =真の偶然のレート
 =真の偶然のレート
=真の偶然のレート =散在する一致のレート
 =散在する一致のレート
=散在する一致のレート =ランダムな偶然のレート
 =ランダムな偶然のレート
=ランダムな偶然のレート =投影面上の投影オブジェクトの面積
 =投影面上の投影オブジェクトの面積
=投影面上の投影オブジェクトの面積 優れたPETシステムは、臨床的にアクセス可能な活動濃度において高いNECRを持っています。
NECR曲線の形状は、デバイスの設計と調査オブジェクトに大きく依存します。メーカーが示す図は、標準化されたNEMAファントムで測定されました。ただし、調査のオブジェクトがNEMAファントムよりも大きい場合、NECR曲線は、拡散半径の測定割合(死体患者)の測定的な割合を増加させるため、より早く最大に達します。 [22]
視野の軸方向( 視野の軸方向 、afov) [ 編集 | ソーステキストを編集します ]
総記録時間は、ベッドの位置ごとの記録時間と、調査オブジェクトのマッピングに必要なベッド位置の数に依存します。今日のペットスキャナーにはいくつかのリングがあり、したがって15〜25 cmの視野があります。軸FOVのサイズに加えて、いわゆる「スライスオーバーラップ」も役割を果たします。検出器の感度は彼の軸視野の端に落ちるため、オーバーラップを記録する必要があります。次のベッドの位置を記録すると、以前のベッド位置にすでに示されている小さな領域が再び記録されます。軸方向の非常に均一な感度のため、実際の2Dスキャナーは1〜3パーセントのオーバーラップしか必要でした。3Dスキャナーは20〜40パーセントのオーバーラップを必要とするため、検査期間の重要な拡張につながり、3Dモードの感度の効果を部分的にキャンセルします。 [22] 理想は、単一の録音を使用して非常に大きな軸方向の視野で患者全体を記録するペットスキャナーです。このような全身ペットスキャナーはZでした。 B.ユナイテッドイメージングヘルスケアによって実現。 [23] 買収と運用コストが高いため、臨床ルーチンの全身ペットスキャナーの利点は依然として疑わしいです。
- ↑ Bernd J. Krause、Andreas K. Buck、Markus Schwaiger: 核医学腫瘍学。 Ecomed Medicine、2007、ISBN 978-3-609-76308-8、p。20。
- ↑ a b L. Geworski: オンライン 排出断層撮影における定量化の要件。 Habilitation Thesis、ベルリンのフンボルト大学、2003年
- ↑ チャールズL.メルチャー、ペットのシンチレーションクリスタル、J Nucl Med 2000; 41:1051–1055 ( 記念 2006年9月13日から インターネットアーカイブ ; PDF; 59 kb)
- ↑ M. E.ケーシー、R。ナット: ポジトロン放出断層撮影用の多結晶2次元BGO検出器システム 。の: 原子力科学に関するIEEE取引 。 バンド 33 、 いいえ。 初め 、1986年2月、ISSN 1558-1578 、 S. 460–463 、doi: 10.1109/tns.1986.4337143 ( IEEE.org [2022年9月26日にアクセス])。
- ↑ Broadcom: AFBR-S4NXXC013-44P163シリコン光運動虫の簡単な紹介。 Broadcom Inc、2020、 2021年11月1日にアクセス (英語)。
- ↑ GEヘルスケア: DigitalDetektoren Discovery My Gen 2。 GE Healthcare、1。2021年11月、 2021年11月1日にアクセス 。
- ↑ a b c d そうです R.スタンド: の技術的な基盤 18 f-フルオロデオキシグルコース – 陽性排出ドモグラフィ診断 ; Acta Medica outriaca、Blackwell Verlag、29年、第5号2002、pp。149–155。 doi:10.1046/j.1563-2571.2002.02040.x
- ↑ a b c d ワーリング、アレクサンダー、 陽電子放出断層撮影における弦放射のモデルベースの補正
- ↑ Helmholtz-Zentrum Dresden-Rossendorf:全身検査中の動き関連のアーティファクトの修正 ( ページは使用できなくなりました。検索してください Webarchiven )) 情報: リンクは、欠陥として自動的にマークされました。指示に従ってリンクを確認してから、このメモを削除してください。
- ↑ A.Martínez-Möller、W。Howe、M。Schwaiger、S。NekollaMotion Free画像ペットリスト取得のデュアルゲーティングによる画像は、2006年9月にスペインのバルセロナで開催
- ↑ 4D PET/CTは臨床医を順調に保ちます、アイテムaufpp://new.rellycomm.com/ ( 記念 2008年4月13日から インターネットアーカイブ ))
- ↑ Cyrill Burger、David Townsend:Pet Scanning、AUSの基本:Gustav K. Von Schulthess:Molecular Anatomic Imaging、Pet-CTおよびSpect-CT Integrated Modality Imaging、Lippincott Williams&Wilkins 2007
- ↑ www.hegeadthcare.comのDiscovery 600 Product Infos ( 記念 の オリジナル 2011年4月9日から インターネットアーカイブ )) 情報: アーカイブリンクは自動的に使用されており、まだチェックされていません。指示に従ってオリジナルとアーカイブのリンクを確認してから、このメモを削除してください。
- ↑ イメージングテクノロジーニュースに関するマイケルハースによる記事 ( 記念 2008年4月13日から インターネットアーカイブ ))
- ↑ S. Surti、S。Karp、L.M。Popescu、E。Daube-Witherspoon、M。Werner;ナット。米国フィラデルフィア、フィラデルフィア、米国衛生研究所: 完全に3-DPETの飛行時間の利益の調査。 の: 医療画像に関するIEEEトランザクションVol。 25、No。5。 IEEE Engineering in Medicine and Biology Society、MAI 2006、 S. 529–538 、 2010年8月22日にアクセス (英語)。
- ↑ Siemens Healthiners: 伝記作家のビジョン、技術的な詳細。 の: Siemens Healthineers Webサイト。 Siemens Healthineers、2021、 2021年11月1日にアクセス (英語)。
- ↑ Sun Il Kwon, Ryosuke Ota, Eric Berg, Fumio Hashimoto, Kyohei Nakajima: 超高速タイミングにより、再構築のないポジトロン放出イメージングが可能になります 。の: 自然フォトニクス 。 14. 2021年10月、ISSN 1749-4893 、 S. 1–5 、doi: 10.1038/s41566-021-00871-2 ( Nature.com [2021年11月1日にアクセス])。
- ↑ パニン等。 (Siemens)「ポイントソース測定から派生したシステムマトリックスを使用した完全な3Dペット再建」、IEEE Medical Imaging、Vol。 25、No。7、2006年7月。
- ↑ 欧州核医学ジャーナル、Vol 30、No。11、2003年11月
- ↑ 新規拡張Nema Phantom、C。Jonsson、メンバー、IEEE、R。ODH、P-Oを使用した3リングおよび4リングの伝記PETスキャナーのイメージング特性の比較。 Schnell and S.A. Larsson、メンバー、IEEE、2007 IEEE原子力科学シンポジウム会議記録、M13-25
- ↑ Sánchez-Crespo、et al。 「ヒト組織におけるポジトロン飛行とペット画像への影響の空間分解能」、Eur J Nucl Med、Vol 31、ISS 1、2004年1月、pp 44–51。
- ↑ a b チャールズ・スターンズ、アレクサンダー・トクマン:ペットスキャナーの設計基準:何が重要で、なぜ。 Beitrag AUS:Gustav K. Von Schulthess:Molecular Anatomic Imaging、Pet-CTおよびSpect-CT Integrated Modality Modality Imaging、Lippincott Williams&Wilkins 2007
- ↑ サラ・リアドン: 全身PETスキャナーは、数秒で3D画像を生成します 。の: 自然 。 バンド 570 、 いいえ。 7761 、12。2019年6月、 S. 285–286 、doi: 10.1038/d41586-019-01833-z ( Nature.com [2020年10月27日にアクセス])。
Recent Comments