救済 – ウィキペディア

いつ 解決 (座標コンバーターの英語)は、電磁測定コンバーターと呼ばれ、ローターの角度を電気サイズに変換します。他の角度貸し手または角度ギアは、たとえば、ポテンショメータ、増分プロバイダー、絶対値です。
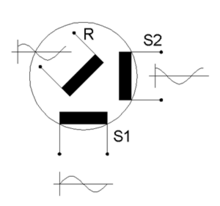
円筒形のハウジングでは、2つのステーター巻線が90°移動したものが配置されており、ローター巻きでハウジングに保存されているローターを囲みます。ローターの巻線は、グラインドとブラシを介して外側に導かれます。今日のリゾルバーは通常ブラシレスで、ローターの情報は誘導的に送信されます。インクリメンタルプロバイダーとは対照的に、リゾルバーは革命(ポールディビジョン)内で絶対角度信号を提供するため、スイッチをオンにした後も参照する必要はありません。
ステーター励起 [ 編集 | ソーステキストを編集します ]
S1ステーターの巻線は、副鼻腔型のAC電圧で興奮しています。 S2ステーターの巻線は、S1と比較して交互の電圧がシフトして励起されます。ローター巻きで誘導される電圧の位相状況は、ローターの位置に依存します。
- ローターがS1ステーターの巻線と正確に比較されている場合、ローター電圧の位相位置は0°です。
- ローターがS2ステーター巻線の反対側にある場合、ローター電圧の位相位置は90°です。
- ローターがS1とS2の間の中央に立っている場合、ローター電圧の位相位置は45°です。
回転中に、角度の角度が交互の電圧を供給し、その位相は0°から360°に回転します。したがって、S1の励起張力に関連するローターの出力電圧の位相位置は、ローターの角度の尺度です。
ローター [ 編集 | ソーステキストを編集します ]

あるいは、ローター巻線Rは、副鼻腔型のAC電圧で励起されます。 S1およびS2で誘導される張力の振幅は、ローターの角度に依存し、ローターの角の洞とコサインに対応します。角度の角度
振幅から計算します
 振幅から計算します
振幅から計算します と
 と
と 終えた
 終えた
終えた 
説明されている2ピン角度に加えて、マルチポールデザインもあります。 4ピン角度ベアリングは、ローター回転で2×360°の位相シフトを与えます。微分角剤には、2つのローター巻線が90°相殺されているため、90°シフトした2つの出力張力が発生します。
ブラシレス角の角度の場合、回転する透過によってローターの張力が変換されます。
3つのステーターコイルが約120°移動する誘導ロータリーは、シンクロと呼ばれます。
角度の角度の出力信号は、適切なデバイスを使用して表示するために直接使用するか、測定または制御デバイスを補強またはデジタル化することができます。機械的要素の角度が興味を持っているところはどこでも、船舶、たとえば、船舶、化学および電気植物のコントロール、または制御された工作機械や産業用ロボットの安定性としての位置など、角度層が使用されました。古いレーダーデバイスと回転無線および無線アンテナ、および電波もリゾルバーを使用しました。
リゾルバーは、多くの場合、オプトエレクトロニクス、デジタル角度ベアラー、およびその他の増分と絶対的な価値に置き換えられていますが、テキスタイルマシン、マイニングマシン、サーボモーターなどの多くのアプリケーションで堅牢で安価なソリューションとして自分自身を主張しています。ブラシレスリゾルバーの利点の1つは、貯蔵を除いて摩耗することなく動作することですが、オプトエレクトロニクスの場合は汚染がいつでも予想されることです。長い間走るはずの植物の場合、LEDの寿命は限られています。
堅牢な構造により、リゾルバーは、液体窒素(-197°C)、高真空(+200°Cまで)、および高い放射活動環境、つまり他の層が失敗する領域で使用できます。
- ジェロームケスラー(編): Synchro/Resolver Conversion Handbook 。第5版。 Data Device Corporation、Company Script、1999、LCCN 74-077038 ( DDC-web.com [PDF; 1.5 MB ]初版:1974)。
Recent Comments