地上ナビゲーション – ウィキペディア

地上ナビゲーション 海岸に引き込まれた地上のスタンドラインの助けを借りて海上での場所の決定を呼び出す場合(同じ原則に従って、コンパスとのナビゲーション、フィールドのマップ)。スタンドラインとは、船が観察時にあるライン、つまり 幾何学的な場所 基本的な幾何学の意味で。場所を決定するには、少なくとも2つのスタンドラインが必要です。これらのスタンドラインの交差点は、非常に「観察された船の場所」です。これは、スタンドラインの交差点の周りの小さな円と時間の仕様の周りの小さな円によって航海チャートに入力されます。スタンドラインは、可能であれば90度の角度で自分自身を切るはずです。切断角度が90度の逸脱の方が多いほど、場所は小さくなります。 2つ以上のスタンドラインが見つかる場合、それらは一般にいくつかの交差点を形成し、これはマルチコーナーです(特に、「エラートライアングル」が呼ばれる)。系統的なエラーの考慮事項がそれに反対しない限り、求められている会場は、より正確には、より正確には、より正確には、より正確には頻繁なエリアの焦点で想定されます。
地上の標準は、次の手順を使用して取得できます。
- 初め。 ペイロング :観測されたオブジェクトを介して特定の方向を持つスタンドラインを作成します。構築されたスタンドラインは、メルカトルカードでまっすぐに動作します。
- 2。 水平角測定 :観測されたオブジェクトの周りに特定の半径を持つ円形アーチを作成します。
- 3。 宇宙の決定 :観測されたオブジェクトの周りに特定の半径を持つ円形のアーチを作成します。
- 4。 スムーズ :不規則な深さのラインを作成します(客観的な深さの場合のみ – 航海チャートから – 利用可能)
90°の条件は、同時ベアリングと同じオブジェクトの距離決定で理想的に満たされます。
クロス – 終了 [ 編集 | ソーステキストを編集します ]

クロス – 終了 (「カットバック」とも呼ばれます)は、目に見えるオブジェクトの位置を使用して位置を決定する簡単な方法であり、その位置は既知です。よく知られている位置のフィールドにある2つの観測可能なポイント、および(方向)コンパス、マップ、ルーラー、コースの三角形が必要です。
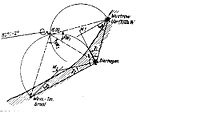
第一に、方向は、よく知られている位置、ここで古代の寺院を持つ印象的なエリアに決められています。ボートの位置は、方向角で「茎」のどこかにあります 354° したがって、それはスタンドラインとも呼ばれます。可能であれば、方向角は2番目の領域ポイント「Factory Chimney」まで決定されます( 55° )。ボートの位置は、方向性角度のあるスタンドラインのどこかにあります 55° そして、方向角で最初に決定されたスタンドラインで 354° 、正確に2つのスタンドラインの交差点で。
粉砕切断を避けるために、2つのベアリング間の角度は20°より小さくてはなりません。さらなるランドマークは、エラーを減らすためにターゲットを絞ることができます。これにより、他のスタンドラインや交差点が生じ、一般に不規則なポリゴンが形成されます。このマルチトレイのスペースの領域は、可能な限り最高の平均船と見なされます。
目に見えるオブジェクトのターゲティングに加えて、他の手順は、十字架の交差点のスタンドラインを提供することもできます。 B.方向マイクの助けを借りて、無線スペースとターゲットの音響信号プロバイダー。
クロスエンドの基本的な形式では、ベアリングは(可能であれば)同時に実行する必要があります。ただし、船がコースラインでどの方向(「コース」)を移動したか(「距離」)がどこまで移動したかがわかっている場合に、出荷場所のために一度決定されたプレスチームを使用することもできます。この目的のために、現在カバーされている距離の周りのコースラインの方向の方向は並行して移動し、新しい時間の標準線を取得します。この手順は意味します 帆 スタンドラインの。
参照: 航空のクロスライン
Querab-Peilung [ 編集 | ソーステキストを編集します ]
たとえば、デッキベアリングを使用して、既知のスタンドラインに従う場合、別のオブジェクトがスタンドラインの隣にある場合、この「クロスアブ」を目指している場合、つまりスタンドラインの正しい角度である場合、自分の位置を非常に正確に決定できます。オブジェクトがスタンドラインに近いほど、位置がより正確に見つかります。
垂れ下がったストリーム [ 編集 | ソーステキストを編集します ]

よく知られている位置の位置であっても、あなたがそれを2回ターゲットにし、異なる方向で「見た」場合、ベアリングを使用して自分の位置を決定できます。ただし、 垂れ下がったストリーム 地面と地上のコースを越えた旅。必要に応じて、地面を越えた旅は水と電流を通る旅から計算され、コースはコースから水、電気オフセット、風速で推定されます。
第一に、「アンティーク寺院」の特徴的なエリアへの方向が再び決定されます。ボートの位置は、方向角354°のスタンドラインのどこかにあります。ボートは、例10 kmで、よく知られている速度で描かれた黄色の「コースライン」に既知のコース(95°)が既知のコース(95°)でしばらく続きます。最初のベアリングの時点で、それは角度354°のスタンディングラインにあり、今では95°に向かって10 km移動するスタンディングラインに配置する必要があります(描かれた例では、「フォグバンク」を通過します)。神殿は現在、場所の決意のために再び標的にされています。ボートの位置は、角度315°と「フォグバンク」(角度354°)のシフト(「サンク」)スタンドラインを備えたこの新しいスタンドの交差点です。
幾何学的構造の場合、ターゲットオブジェクト(アンティーク寺院)から船の距離が正弦セットを使用した場合、方向方向の(最初の)方向の平行界面を省略できます – すべての角度は、三角形と沈んだルートで知られています。
この三角形が、航行距離とPEILオブジェクトまでの距離が等しく長いという事実と同等である場合、請求書は必要ありません。 αは、コースラインと方向の方向の間の角度、βは他のベアリングに関するものです。 β= 180°-2αの場合、三角形は同等です。この条件は、2番目のベアリングの時間を設定します。
同等の三角形も直角にある場合、α=β= 45°。名前は、たるんだストリームのこの特別なケースのためにもあります 4つのラインベアリング いつもの;なぜなら、航海の脳卒中の初期の角度単位で表現されているため、45°= 4線。
等しい三角形の対称性を活用する垂れ下がった空間の特別なケースでは、高い観察活動の大きな欠点の小さな利点は、わずかに単純な構造の小さな利点に反対しています。

のための位置決定のために 水平角測定 最初に2つの水平角を測定する必要があります。
- 角度 a 、その下に「寺院」と「家」の間のルートが場所から現れます
- 角度 b 、その下に「ハウス」 – 「工場」の間のルートが場所から表示されます。
角度測定は、六重量などの適切な測定デバイスまたは地形ポイントへのベアリングの違い(コンパスによる)で直接計算できます。コンパスを使用した角度測定が発生した場合、ラインと比較した水平角測定には、コンパスエラー(不幸と磁気障害によって引き起こされる)が一般に位置の決定を偽造しないという利点があります。六分儀を使用すると、達成可能な精度が高くなります。
求められる位置は、すべての場所が角の下の「テンペルハウス」ルートからある円の上にあります a 表示される(アクレイス)。この円は、円周角セットの助けを借りて構築できます。
同様に、あなた自身の位置は場所の円の上にあります。 b 表示されます。ただし、写真には、角度の正しい方向に関連するもののみが写真にあります a と b 入力。求められている位置は、地形が「正しい順序」に現れるこのサークルの交差点にあります。つまり、家は寺院の右側に見ることができます。
場所の位置のこの手順は、3つの既知のポイントがすべて既に円形スタンドの1つ(写真の円)にある場合に失敗します。したがって、円には4つのポイントすべてがあります(たとえば、工場が大きな赤い円にあった場合)。
すべての「通常のケース」について、次の「試行手順」は、円を使用して、構造に代わる実用的で頻繁に使用される代替品を表します。2つの調整可能な太ももを備えた二重のwindナイフに測定された水平角を挿入すると、角度マップを移動することで見つけることができます。この方法は、二重ひねりナイフの代わりに角のある水平角を使用する場合にも適用できます。この手順は、Geodesyの逆カットに対応しています。
また、サークル、ポテノッチェ構造を必要としない建設プロセスもあります。

3つのポイント(ランドマーク)があります。位置p(船の場所)は、ポイントpで切断する2つの円を使用して決定されます。 2つの測定された角度は、太ももの上でbから除去され、角度90°alphaと角度90°ベタとしてBdから除去されます。次に、垂直がaとcから削除されます。 2つの長期にわたるラインはDとEにカットされたことを意味します。これは、2つの円がDABとBCEによって決定されることを意味します。ラインdeから、垂直はBに倒されます
この方法の助けを借りて場所を決定するには、次の要件を満たす必要があります。
- ベアリングは、よく知られている位置を持つオブジェクトに決定する必要があります。
- オブジェクトまでの距離が既知でなければなりません。
次に、位置が決定されます。
地図上では、あなたから遠くにあるよく知られているオブジェクトの周りに円が描かれています。ラインの交差点がカードに入力され、オブジェクトを横切ります。その後、独自の場所は、オブジェクトの周りの円が線を横切るポイントにあります。
距離決定は、一般に高さ角度測定で実行されます。 Tangenの使用はここで使用されます:

- と
- E =オブジェクトの削除
- H =既知のオブジェクトの高さ
- φ=測定された高度角
あるいは、小さな角度の近似は馴染みがあり、必要に応じてコンピューターなしで実行できます。
- (航海のマイル、数分で角度)

高度の角度を判断するために、六面端が船乗りに使用されます。照らされた火災監督に記載されているように、オブジェクトの高さは、灯台の火括弧の高さなどを知っている必要があります。
高さがわからない場合、それでも距離は、セーリングをたるむ方法に従って2番目の高度角測定を使用して決定できます。 2つの測定値の間で、分割されるオブジェクトは、覆われた距離を計算できるようにするために、オブジェクトにリッピングされ、時間が測定されます(s =v∙t)。
この方法の助けを借りて場所を決定するには、次の要件を満たす必要があります。
- ベアリングは、位置がわかっているオブジェクトによって決定されなければなりません
- 水の深さはあなた自身の位置で知られている必要があります。
次に、位置が決定されます。
オブジェクトラインは海軍カードに入力されます。このラインでは、船の下の現在の水深と一致する水深を備えた地図のエントリを検索する必要があります。
2番目のスタンドが利用できない場合は、一定の間隔で無駄にされる行の減少を行うこともできます。次に、測定された深さが測定値と測定値と一致する場所の場所で、クレイジーな間隔で測定された深度値をストリップ(Paus-)紙にカードコース検索に向けて送信します。この手順は、深い値に顕著な変化をもたらすために海底が十分に迅速に変化した場合にのみ適用されます。

大規模なサークルナビゲーションは、可能な限り短い方法で望ましい目標を達成する目的に役立ちます。これにより、通常、移動時間とコストを節約できます。地球の表面の開始点とターゲットポイント(いわゆる「オルソドローム」)の間の最短の接続は、大きなグループにあります。一般に、この接続は一定のコース角の線とは異なります(そのため、「ロクソドローム」と呼ばれています)、違いはさまざまな距離で不可欠です。オルソドロムとロクソドロームは、開始点と終了ポイントが同じ子午線または赤道にすでに大きな円にある場合にのみ崩壊します。大きな円のナビゲーションは、地球を理想的な球形に簡素化し、いくつかの近似プロセスを提供して、最短の接続を駆動する正しいコース角を見つけることができます。この目的のために、必要なロクソドローム荷重を特定の間隔でテーブル作業から計算または決定することができます。
この例は、大きな円のナビゲーションで考慮しなければならない側面の1つを明確に示しています。(ラウンドアバウト)コンパスは常に地理的な南極に向かっているため、コースラインにはさまざまなポイントがあります。 マウントヴィンソン 目標に Mac Robertson Land 非常に異なる(コンパス)コース(170°、132°、13°)。最新のナビゲーション計算機は、コース要件の必要な一定の調整を自動的に実行できます。
1%の精度でナビゲーション計算では、R = 6,371 kmの半径のボールとして地球を設定するだけで十分です。 500 km未満の小さな距離では、直眼腫とロクソドロームの違いは無視できます。
スタンディングラインがその決定のそれよりも一度に必要な場合、現在駆動されているコースの方向に覆われた距離の周りを移動します。この構造はセーリングと呼ばれます。オブジェクトが異なる時期にターゲットにされている場合、上記で既に扱われているヒンジの最後に使用されます。
指定は、ノーティクスに基づいて出荷における地上航法に使用されます。フェアウェイの特別なセクションのオリエンテーション、ガイドライン、ガイド、ガイド、セクターの火災、クロスブランド火災が設定されています。国際灯台協会(IALA)の基準に従って、フェアウェイの特に限られた地域のラベル付けには、強調システムが使用されています。制御バレル、枢機sign、単一のリスクビン、またはレックビンは、特定の状況を示すことができます。 [初め]
- H.Kärsten: 航海ペーパーバック。 Fachbuchverlag Leipzig、章:I。Terrestlical Navigation pp。13–71Div。図1955。
- メルダウ・ステッペス: ナビゲーション教科書。 アーサー・ガイスト・ヴェルラグ・ブレメン、章:I。地上航法pp。1.1-.1.47div。図1958
- GDR著者: 地上ナビゲーション 、Verlag for Building Technology 1968
- WinfriedBöhm: ナビゲーションのハンドブック。 -Bussesche Publishing House Herford、Chap。:11および12 Terret。 Nav。pp。66–78Div。図1978. ISBN 3-87120-323-8
- Karl Terheyden、G。Zickwolff:地上航法。 In:ナビゲーション。船管理のためのハンドブック、ボリューム1 / Axel-Springer-Verlag、ベルリン /ハイデルベルク1983。
- Bernhard Berking、Werner Huth(Hg。): ハンドブックNautics -Navigatory Ship Command。 Sehafen Verlag Hamburg、第2章:従来のナビゲーション、2010年9月。ISBN978-3-87743-821-3
- ↑ Bernhard Berking、Werner Huth: ハンドブックNautics-航行船管理。 第1版。 Seehafen Verlag、2010、pp。44–48
Recent Comments