Trong cơ học cổ điển, một hạt nằm trong trạng thái cân bằng cơ học nếu lực ròng trên hạt đó bằng không. [1]: 39 Bằng cách mở rộng, một hệ thống vật lý gồm nhiều bộ phận ở trạng thái cân bằng cơ học nếu lực ròng trên mỗi bộ phận riêng lẻ của nó bằng không. [1]: 45 xăng46 [2]
Ngoài việc xác định trạng thái cân bằng cơ học về mặt lực, có nhiều định nghĩa thay thế cho trạng thái cân bằng cơ học, tất cả đều tương đương về mặt toán học. Về động lượng, một hệ ở trạng thái cân bằng nếu động lượng của các bộ phận của nó là không đổi. Về mặt vận tốc, hệ ở trạng thái cân bằng nếu vận tốc không đổi. Trong trạng thái cân bằng cơ học quay, động lượng góc của vật được bảo toàn và mômen thuần bằng không. [2] Nói chung trong các hệ bảo thủ, trạng thái cân bằng được thiết lập tại một điểm trong không gian cấu hình trong đó độ dốc của năng lượng tiềm năng đối với tổng quát tọa độ bằng không.
Nếu một hạt ở trạng thái cân bằng có vận tốc bằng không, thì hạt đó ở trạng thái cân bằng tĩnh. [3][4] Vì tất cả các hạt ở trạng thái cân bằng đều có vận tốc không đổi, nên luôn luôn có thể tìm thấy một khung tham chiếu quán tính trong đó hạt đứng yên khung.
Tính ổn định [ chỉnh sửa ]
Một tính chất quan trọng của các hệ thống ở trạng thái cân bằng cơ học là tính ổn định của chúng.
Kiểm tra độ ổn định năng lượng tiềm năng [ chỉnh sửa ]
Nếu chúng ta có một hàm mô tả năng lượng tiềm năng của hệ thống, chúng ta có thể xác định cân bằng của hệ thống bằng phép tính. Một hệ thống ở trạng thái cân bằng cơ học tại các điểm tới hạn của chức năng mô tả năng lượng tiềm năng của hệ thống. Chúng ta có thể định vị các điểm này bằng cách sử dụng đạo hàm của hàm bằng 0 tại các điểm này. Để xác định xem hệ thống ổn định hay không ổn định, chúng tôi áp dụng thử nghiệm đạo hàm thứ hai:
- Đạo hàm thứ hai <0
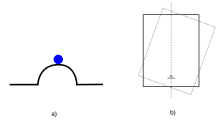
- Năng lượng tiềm năng ở mức tối đa cục bộ, có nghĩa là hệ thống ở trạng thái cân bằng không ổn định. Nếu hệ thống bị dịch chuyển một khoảng cách nhỏ tùy ý khỏi trạng thái cân bằng, thì các lực của hệ thống sẽ khiến nó di chuyển xa hơn.
- Đạo hàm thứ hai> 0
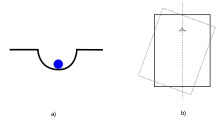
- Năng lượng tiềm năng ở mức tối thiểu cục bộ. Đây là một trạng thái cân bằng ổn định. Phản ứng đối với một nhiễu loạn nhỏ là các lực có xu hướng khôi phục trạng thái cân bằng. Nếu có thể có nhiều hơn một trạng thái cân bằng ổn định cho một hệ thống, thì bất kỳ trạng thái cân bằng nào có năng lượng tiềm năng cao hơn mức tối thiểu tuyệt đối đại diện cho trạng thái siêu bền.

- Đạo hàm thứ hai = 0 hoặc không tồn tại
- Trạng thái trung tính ở mức thấp nhất và gần như duy trì trạng thái cân bằng nếu thay thế một lượng nhỏ. Để điều tra sự ổn định chính xác của hệ thống, các dẫn xuất bậc cao hơn phải được kiểm tra. Trạng thái không ổn định nếu đạo hàm nonzero thấp nhất là bậc lẻ hoặc có giá trị âm, ổn định nếu đạo hàm nonzero thấp nhất đều có thứ tự chẵn và có giá trị dương và trung tính nếu tất cả các đạo hàm bậc cao hơn bằng không. Ở trạng thái trung tính thực sự, năng lượng không thay đổi và trạng thái cân bằng có chiều rộng hữu hạn. Điều này đôi khi được gọi là trạng thái ổn định biên hoặc trong trạng thái thờ ơ.
Khi xem xét nhiều chiều, có thể nhận được các kết quả khác nhau theo các hướng khác nhau, ví dụ như sự ổn định đối với các chuyển vị trong x -định hướng nhưng không ổn định trong y -direction, một trường hợp được gọi là điểm yên ngựa. Nói chung, trạng thái cân bằng chỉ được gọi là ổn định nếu nó ổn định theo mọi hướng.
Hệ thống không xác định tĩnh [ chỉnh sửa ]
Đôi khi không có đủ thông tin về các lực tác động lên cơ thể để xác định xem nó có ở trạng thái cân bằng hay không. Điều này làm cho nó một hệ thống không xác định tĩnh.
Ví dụ [ chỉnh sửa ]
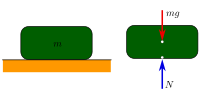
Một vật thể đứng yên (hoặc bộ vật thể) ở trạng thái cân bằng tĩnh, là trường hợp đặc biệt của trạng thái cân bằng cơ học. Một chặn giấy trên bàn là một ví dụ về trạng thái cân bằng tĩnh. Các ví dụ khác bao gồm một tác phẩm điêu khắc cân bằng đá, hoặc một khối các khối trong trò chơi Jenga, miễn là tác phẩm điêu khắc hoặc chồng các khối không ở trong tình trạng sụp đổ.
Các vật thể chuyển động cũng có thể ở trạng thái cân bằng. Một đứa trẻ trượt xuống một slide với tốc độ không đổi sẽ ở trạng thái cân bằng cơ học, nhưng không ở trạng thái cân bằng tĩnh (trong khung tham chiếu của trái đất hoặc slide).
Một ví dụ khác về trạng thái cân bằng cơ học là một người nhấn lò xo đến một điểm xác định. Anh ta hoặc cô ta có thể đẩy nó đến một điểm tùy ý và giữ nó ở đó, tại đó tải trọng nén và phản ứng lò xo bằng nhau. Ở trạng thái này hệ thống ở trạng thái cân bằng cơ học. Khi lực nén được loại bỏ, lò xo trở về trạng thái ban đầu.
Số lượng cân bằng tĩnh tối thiểu của các vật thể đồng nhất, lồi (khi nghỉ dưới trọng lực trên bề mặt nằm ngang) được đặc biệt quan tâm. Trong trường hợp phẳng, số lượng tối thiểu là 4, trong khi ở ba chiều, người ta có thể xây dựng một vật thể chỉ với một điểm cân bằng ổn định và không ổn định. [ cần trích dẫn ] Một đối tượng như vậy là gọi là một gömböc.
Xem thêm [ chỉnh sửa ]
Ghi chú và tài liệu tham khảo [ chỉnh sửa ]
- ^ a b John L Synge & Byron A Griffith (1949). Nguyên tắc cơ học (tái bản lần 2). McGraw-Hill. [659090] Cơ học véc tơ cho kỹ sư: Statics và Động lực học (tái bản lần thứ 9). Đồi McGraw. tr. 158. CS1 duy trì: Nhiều tên: danh sách tác giả (liên kết)
- ^ Herbert Charles Corben & Philip Stehle (1994). Cơ học cổ điển (Tái bản năm 1960 tái bản). Chuyển phát nhanh Dover ấn phẩm. tr. 113. ISBN 0-486-68063-0.
- ^ Lakshmana C. Rao; J. Lakshminaraimhan; Raju Sethuraman; Srinivasan M. Sivakumar (2004). Cơ học kỹ thuật . Học tập PHI Pvt. Ltd. p. 6. ISBN 81-203-2189-8.
Đọc thêm [ chỉnh sửa ]
- Marion JB và Thornton ST. (1995) Động lực học cổ điển của các hạt và hệ thống. Phiên bản thứ tư, Harcourt Brace & Company.