
Một quả cầu (từ Hy Lạp σφαῖρα – sphaira "quả cầu, quả bóng" [1]) là một vật thể hình tròn hoàn hảo không gian hai chiều là bề mặt của một quả bóng tròn hoàn toàn (viz., tương tự như các vật thể tròn trong hai chiều, trong đó một "vòng tròn" bao quanh "đĩa" của nó).
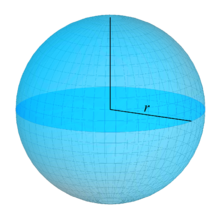
Giống như một vòng tròn trong không gian hai chiều, một quả cầu được định nghĩa toán học là tập hợp các điểm có cùng khoảng cách r từ một điểm nhất định, nhưng trong không gian ba chiều. [2] Khoảng cách này r là bán kính của quả bóng, được tạo thành từ tất cả các điểm có khoảng cách nhỏ hơn r từ điểm đã cho, là tâm của toán học trái bóng. Đây cũng được gọi là bán kính và trung tâm của hình cầu, tương ứng. Đường thẳng dài nhất xuyên qua quả bóng, nối hai điểm của quả cầu, đi qua tâm và do đó chiều dài của nó gấp đôi bán kính; nó là một đường kính của cả hình cầu và quả bóng của nó. . không gian Euclide hai chiều và một quả bóng có hình dạng ba chiều bao gồm hình cầu và mọi thứ bên trong quả cầu (một quả bóng kín ), hoặc , thường xuyên hơn, chỉ là các điểm bên trong nhưng không phải trên hình cầu (một bóng mở ). Sự khác biệt này không phải lúc nào cũng được duy trì và đặc biệt là các tài liệu tham khảo toán học cũ hơn nói về một hình cầu như một vật rắn. Điều này tương tự như tình huống trong mặt phẳng, trong đó các thuật ngữ "vòng tròn" và "đĩa" cũng có thể bị nhầm lẫn.
Các phương trình trong không gian ba chiều [ chỉnh sửa ]
Trong hình học giải tích, một hình cầu có tâm [ 19659017] 0 y 0 z 0 ) và bán kính r là địa điểm của tất cả các điểm ( x y z ) sao cho

Đặt a, b, c, d, e là số thực với a ≠ 0 và đặt

Sau đó phương trình

không có điểm thực như các giải pháp nếu <img src = "https://wikidia.org/api/rest_v1/media/math/render/svg/befc67bb24ee0793a950953cd8b7464bdd9 -inline "aria-hidden =" true "style =" vertical-align: -0.838ex; chiều rộng: 5.463ex; chiều cao: 2.676ex; "alt =" rho < 0"/> và được gọi là phương trình của một quả cầu tưởng tượng . Nếu

là điểm
 là điểm
là điểm và phương trình được cho là phương trình của một quả cầu điểm . Cuối cùng, trong trường hợp
 và phương trình được cho là phương trình của một quả cầu điểm . Cuối cùng, trong trường hợp
và phương trình được cho là phương trình của một quả cầu điểm . Cuối cùng, trong trường hợp

là một phương trình của một hình cầu có tâm là

{ displaystyle { sqrt { rho}}} “/>. [2]
Nếu a trong phương trình trên là 0 thì f ( x y z ) = 0 là phương trình của một chiếc máy bay. Do đó, một mặt phẳng có thể được coi là một hình cầu có bán kính vô hạn có tâm là một điểm ở vô cực. [3]
Các điểm trên quả cầu có bán kính
và trung tâm
 và trung tâm
và trung tâm có thể được tham số hóa thông qua
 có thể được tham số hóa thông qua
có thể được tham số hóa thông qua - <img src = "https://wikidia.org/api/rest_v1/media/math/render/svg/438b17a5e7aec85deba957075f957c4dbddb -image-inline "aria-hidden =" true "style =" vertical-align: -4.005ex; chiều rộng: 51.067ex; chiều cao: 9.176ex; "alt =" { displaystyle { started {căn chỉnh} x & = x_ {0} + r sin varphi ; cos theta y & = y_ {0} + r sin varphi ; sin theta qquad (0 leq varphi leq pi, ; 0 leq theta <2pi )z&=z_{0}+rcos varphi ,end{aligned}}}"/>[4]
Một hình cầu có bán kính bất kỳ có tâm ở 0 là một mặt tích phân của dạng vi phân sau:

Phương trình này phản ánh vị trí và vectơ vận tốc của một điểm, ( x y , z ) và ( dx dy dz ) đi trên quả cầu luôn luôn trực giao với nhau.
Một hình cầu cũng có thể được xây dựng như bề mặt được hình thành bằng cách xoay một vòng tròn về bất kỳ đường kính nào của nó. Vì hình tròn là một loại hình elip đặc biệt, hình cầu là một loại hình elip đặc biệt của cách mạng. Thay thế vòng tròn bằng một hình elip xoay quanh trục chính của nó, hình dạng trở thành một hình cầu prolate; xoay quanh trục nhỏ, một hình cầu bắt buộc. [5]
Khối lượng kèm theo [ chỉnh sửa ]
Trong ba chiều, khối lượng bên trong nghĩa là thể tích của một quả bóng, nhưng được gọi một cách cổ điển là thể tích của một quả cầu) là

Tại bất kỳ x âm lượng tăng dần ( V ) bằng với sản phẩm của diện tích mặt cắt ngang của đĩa tại x và độ dày của nó ( δx ):

Tổng âm lượng là tổng của tất cả các khối lượng gia tăng:

Trong giới hạn là x tiến gần đến 0 [7] phương trình này trở thành:

Tại bất kỳ x một tam giác vuông góc phải kết nối x y và r về nguồn gốc; do đó, áp dụng định lý Pythagore :

Sử dụng thay thế này mang lại

có thể được đánh giá để đưa ra kết quả
![{ displaystyle V = pi left [r^{2}x-{frac {x^{3}}{3}}right] _ {- r} ^ {r} = pi left (r ^ {3} - { frac {r ^ {3}} {3}} phải) - pi left (-r ^ {3} + { frac {r ^ {3}} {3}} right) = { frac {4} {3}} pi r ^ {3} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4c081de9760153a5ab7e59be1b9de1aa97d08dec)
Ngoài ra, công thức này được tìm thấy bằng cách sử dụng tọa độ hình cầu, với khối lượng ele tinh thần


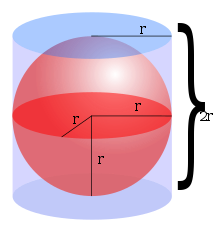
Đối với hầu hết các mục đích thực tế, khối lượng bên trong một hình cầu được ghi trong một khối có thể xấp xỉ bằng 52,4% thể tích của khối lập phương, kể từ V = π / 6 d 3 trong đó d là đường kính của hình cầu và cũng là chiều dài của một cạnh của khối lập phương và π / 6 ≈ 0,5236. Ví dụ, một quả cầu có đường kính 1 mét có 52,4% thể tích của một khối lập phương có chiều dài cạnh 1 mét, hoặc khoảng 0,524 m 3 .
Diện tích bề mặt [ chỉnh sửa ]
Diện tích bề mặt của một hình cầu bán kính r là:

Tại bất kỳ bán kính nhất định r [10] âm lượng tăng dần ( V ) bằng với sản phẩm của diện tích bề mặt tại bán kính r A ( r ) ) và độ dày của vỏ ( r ):

Tổng khối lượng là tổng của tất cả các khối lượng vỏ:

Trong giới hạn là δr tiến đến zero [7] phương trình này trở thành:

Thay thế V :

Phân biệt cả hai mặt của phương trình này đối với r mang lại A là một chức năng của r :

Điều này thường được viết tắt là:

trong đó r hiện được coi là bán kính cố định của hình cầu.
Ngoài ra, phần tử diện tích trên hình cầu được cho theo tọa độ hình cầu bởi dA = r 2 sin θ dθ dφ . Trong tọa độ Descartes, phần tử diện tích là

Để biết thêm tính tổng quát, xem phần tử khu vực .
Do đó, tổng diện tích có thể thu được bằng cách tích hợp:

Hình cầu có diện tích bề mặt nhỏ nhất trong tất cả các bề mặt có thể tích nhất định và nó chứa thể tích lớn nhất trong số tất cả các bề mặt kín có diện tích bề mặt nhất định. Do đó, hình cầu xuất hiện trong tự nhiên: ví dụ, bong bóng và giọt nước nhỏ có dạng hình cầu vì sức căng bề mặt làm giảm tối đa diện tích bề mặt.
Diện tích bề mặt so với khối lượng của quả bóng được gọi là diện tích bề mặt cụ thể và có thể được biểu thị từ các phương trình đã nêu ở trên như

trong đó là mật độ (tỷ lệ khối lượng so với khối lượng).
Thuộc tính hình học [ chỉnh sửa ]
Một hình cầu được xác định duy nhất bởi bốn điểm không phải là đồng phẳng. Tổng quát hơn, một hình cầu được xác định duy nhất bởi bốn điều kiện như đi qua một điểm, tiếp tuyến với một mặt phẳng, v.v.
Do đó, một quả cầu được xác định duy nhất bởi (nghĩa là đi qua) một vòng tròn và một điểm không nằm trong mặt phẳng của vòng tròn đó.
Bằng cách kiểm tra các giải pháp chung của phương trình của hai quả cầu, có thể thấy rằng hai quả cầu cắt nhau trong một vòng tròn và mặt phẳng chứa vòng tròn đó được gọi là mặt phẳng gốc của các quả cầu giao nhau. ] Mặc dù mặt phẳng triệt để là một mặt phẳng thực, nhưng đường tròn có thể là tưởng tượng (các mặt cầu không có điểm thực) hoặc bao gồm một điểm duy nhất (các mặt cầu tiếp tuyến tại điểm đó). [13]
Góc giữa hai quả cầu tại một điểm giao nhau thực sự là góc phân giác được xác định bởi các mặt phẳng tiếp tuyến với các mặt cầu tại điểm đó. Hai quả cầu cắt nhau ở cùng một góc tại tất cả các điểm trong đường tròn giao nhau của chúng. [14] Chúng cắt nhau theo góc vuông (là trực giao) khi và chỉ khi bình phương khoảng cách giữa tâm của chúng bằng tổng bình phương của chúng radii. [3]
Bút chì hình cầu [ chỉnh sửa ]
Nếu f ( x y z ) = 0 và g x y z ) = 0 là phương trình của hai mặt cầu khác biệt sau đó

cũng là phương trình của một hình cầu cho các giá trị tùy ý của các tham số s và t . Tập hợp tất cả các quả cầu thỏa mãn phương trình này được gọi là bút chì của các quả cầu được xác định bởi hai quả cầu ban đầu. Trong định nghĩa này, một hình cầu được phép là một mặt phẳng (bán kính vô hạn, tâm ở vô cực) và nếu cả hai mặt cầu ban đầu đều là mặt phẳng thì tất cả các mặt cầu của bút chì đều là mặt phẳng, nếu không thì chỉ có một mặt phẳng (mặt phẳng gốc) trong bút chì. [3]
Nếu bút chì hình cầu không bao gồm tất cả các mặt phẳng, thì có ba loại bút chì: [13]
- Nếu các quả cầu giao nhau trong một vòng tròn thực C sau đó bút chì bao gồm tất cả các khối cầu chứa C bao gồm cả mặt phẳng triệt để. Tâm của tất cả các mặt cầu bình thường trong bút chì nằm trên một đường thẳng đi qua tâm C và vuông góc với mặt phẳng triệt để.
- Nếu các mặt cầu giao nhau trong một vòng tròn tưởng tượng, thì tất cả các mặt cầu của bút chì cũng đi qua vòng tròn tưởng tượng này nhưng như những quả cầu bình thường, chúng tách rời nhau (không có điểm chung thực sự). Đường tâm nằm vuông góc với mặt phẳng gốc, là mặt phẳng thật trong bút chì chứa đường tròn tưởng tượng.
- Nếu các mặt cầu giao nhau trong một điểm A tất cả các mặt cầu trong bút chì đều tiếp tuyến tại A và mặt phẳng triệt để là mặt phẳng tiếp tuyến chung của tất cả các mặt cầu này. Đường tâm nằm vuông góc với mặt phẳng gốc tại A .
Tất cả các đường tiếp tuyến từ một điểm cố định của mặt phẳng gốc đến các mặt cầu của bút chì có cùng chiều dài. [13] ]
Mặt phẳng triệt để là quỹ tích của các tâm của tất cả các mặt cầu trực giao với tất cả các mặt cầu trong một cây bút chì. Hơn nữa, một hình cầu trực giao với bất kỳ hai hình cầu của một cây bút chì hình cầu là trực giao với tất cả chúng và trung tâm của nó nằm trong mặt phẳng triệt để của bút chì. [13]
Thuật ngữ [ chỉnh sửa ] ]
Các cặp điểm trên một quả cầu nằm trên một đường thẳng đi qua tâm của quả cầu được gọi là các điểm đối cực. Một vòng tròn lớn là một vòng tròn trên quả cầu có cùng tâm và bán kính với quả cầu và do đó, chia nó thành hai phần bằng nhau. Các phần mặt phẳng của một hình cầu được gọi là phần hình cầu . Chúng là tất cả các vòng tròn và những vòng tròn không phải là vòng tròn lớn được gọi là vòng tròn nhỏ . [15]
Khoảng cách ngắn nhất dọc theo bề mặt giữa hai điểm không đối xứng khác nhau trên mặt cầu là chiều dài nhỏ hơn của hai cung trên vòng tròn lớn duy nhất bao gồm hai điểm. Được trang bị "khoảng cách vòng tròn lớn" này, một vòng tròn lớn trở thành vòng tròn Riemannian.
Nếu một điểm cụ thể trên một quả cầu (tùy ý) được chỉ định là cực bắc thì điểm đối cực tương ứng được gọi là cực nam và đường xích đạo là vòng tròn lớn đó là tương đương với họ. Các vòng tròn lớn qua hai cực được gọi là các đường (hoặc kinh tuyến) có kinh độ và đường nối giữa hai cực được gọi là trục quay. Các đường tròn trên mặt cầu song song với đường xích đạo là các đường vĩ độ. Thuật ngữ này cũng được sử dụng cho các cơ quan thiên văn hình cầu xấp xỉ như hành tinh Trái đất (xem Geoid).
Bán cầu [ chỉnh sửa ]
Bất kỳ mặt phẳng nào bao gồm tâm của một quả cầu đều chia nó thành hai bán cầu bằng nhau . Bất kỳ hai mặt phẳng cắt nhau bao gồm tâm của một hình cầu chia hình cầu thành bốn lunes hoặc tam giác, các đỉnh của chúng đều trùng với các điểm đối cực nằm trên đường giao nhau của các mặt phẳng.
Thương số đối cực của hình cầu là bề mặt được gọi là mặt phẳng chiếu thực, cũng có thể được coi là bán cầu bắc với các điểm đối cực của xích đạo được xác định.
Bán cầu được phỏng đoán là sự lấp đầy đẳng cự (diện tích nhỏ nhất) tối ưu của vòng tròn Riemannian.
Khái quát hóa [ chỉnh sửa ]
Kích thước [ chỉnh sửa ]
Các quả cầu có thể được khái quát thành không gian của bất kỳ số lượng kích thước nào. Đối với bất kỳ số tự nhiên nào n " n -sphere", thường được viết là S n là tập hợp của điểm trong ( n + 1 ) – không gian Euclide chiều ở một khoảng cách cố định r từ một điểm trung tâm của không gian đó, trong đó r , như trước đây, một số thực dương. Đặc biệt:
- S 0 : một hình cầu 0 là một cặp điểm cuối của một khoảng [- r r ] of the real line
- S1: a 1-sphere is a circle of radius r
- S2 : a 2-sphere is an ordinary sphere
- S3: a 3-sphere is a sphere in 4-dimensional Euclidean space.
Spheres for n > 2 are sometimes called hyperspheres.
The n-sphere of unit radius centered at the origin is denoted Sn and is often referred to as "the" n-sphere. Note that the ordinary sphere is a 2-sphere, because it is a 2-dimensional surface (which is embedded in 3-dimensional space).
The surface area of the unit (n-1)-sphere is

where Γ(z) is Euler's gamma function.
Another expression for the surface area is

and the volume is the surface area times r/n or

General recursive formulas also exist for the volume of an n-ball.
Metric spaces[edit]
More generally, in a metric space (E,d)the sphere of center x and radius r > 0 is the set of points y such that d(x,y) = r.
If the center is a distinguished point that is considered to be the origin of Eas in a normed space, it is not mentioned in the definition and notation. The same applies for the radius if it is taken to equal one, as in the case of a unit sphere.
Unlike a ball, even a large sphere may be an empty set. For example, in Zn with Euclidean metric, a sphere of radius r is nonempty only if r2 can be written as sum of n squares of integers.
Topology[edit]
In topology, an n-sphere is defined as a space homeomorphic to the boundary of an (n + 1)-ball; thus, it is homeomorphic to the Euclidean n-sphere, but perhaps lacking its metric.
The n-sphere is denoted Sn. It is an example of a compact topological manifold without boundary. A sphere need not be smooth; if it is smooth, it need not be diffeomorphic to the Euclidean sphere.
The Heine–Borel theorem implies that a Euclidean n-sphere is compact. The sphere is the inverse image of a one-point set under the continuous function ||x||. Therefore, the sphere is closed. Sn is also bounded; therefore it is compact.
Remarkably, it is possible to turn an ordinary sphere inside out in a three-dimensional space with possible self-intersections but without creating any crease, in a process called sphere eversion.
Spherical geometry[edit]

The basic elements of Euclidean plane geometry are points and lines. On the sphere, points are defined in the usual sense. The analogue of the "line" is the geodesic, which is a great circle; the defining characteristic of a great circle is that the plane containing all its points also passes through the center of the sphere. Measuring by arc length shows that the shortest path between two points lying on the sphere is the shorter segment of the great circle that includes the points.
Many theorems from classical geometry hold true for spherical geometry as well, but not all do because the sphere fails to satisfy some of classical geometry's postulates, including the parallel postulate. In spherical trigonometry, angles are defined between great circles. Spherical trigonometry differs from ordinary trigonometry in many respects. For example, the sum of the interior angles of a spherical triangle always exceeds 180 degrees. Also, any two similar spherical triangles are congruent.
Eleven properties of the sphere[edit]
In their book Geometry and the Imagination[16]David Hilbert and Stephan Cohn-Vossen describe eleven properties of the sphere and discuss whether these properties uniquely determine the sphere. Several properties hold for the plane, which can be thought of as a sphere with infinite radius. These properties are:
- The points on the sphere are all the same distance from a fixed point. Also, the ratio of the distance of its points from two fixed points is constant.
- The first part is the usual definition of the sphere and determines it uniquely. The second part can be easily deduced and follows a similar result of Apollonius of Perga for the circle. This second part also holds for the plane.
- The contours and plane sections of the sphere are circles.
- This property defines the sphere uniquely.
- The sphere has constant width and constant girth.
- The width of a surface is the distance between pairs of parallel tangent planes. Numerous other closed convex surfaces have constant width, for example the Meissner body. The girth of a surface is the circumference of the boundary of its orthogonal projection on to a plane. Each of these properties implies the other.
- All points of a sphere are umbilics.
- At any point on a surface a normal direction is at right angles to the surface because the sphere these are the lines radiating out from the center of the sphere. The intersection of a plane that contains the normal with the surface will form a curve that is called a normal section, and the curvature of this curve is the normal curvature. For most points on most surfaces, different sections will have different curvatures; the maximum and minimum values of these are called the principal curvatures. Any closed surface will have at least four points called umbilical points. At an umbilic all the sectional curvatures are equal; in particular the principal curvatures are equal. Umbilical points can be thought of as the points where the surface is closely approximated by a sphere.
- For the sphere the curvatures of all normal sections are equal, so every point is an umbilic. The sphere and plane are the only surfaces with this property.
- The sphere does not have a surface of centers.
- For a given normal section exists a circle of curvature that equals the sectional curvature, is tangent to the surface, and the center lines of which lie along on the normal line. For example, the two centers corresponding to the maximum and minimum sectional curvatures are called the focal pointsand the set of all such centers forms the focal surface.
- For most surfaces the focal surface forms two sheets that are each a surface and meet at umbilical points. Several cases are special:
- * For channel surfaces one sheet forms a curve and the other sheet is a surface
- * For cones, cylinders, tori and cyclides both sheets form curves.
- * For the sphere the center of every osculating circle is at the center of the sphere and the focal surface forms a single point. This property is unique to the sphere.
- All geodesics of the sphere are closed curves.
- Geodesics are curves on a surface that give the shortest distance between two points. They are a generalization of the concept of a straight line in the plane. For the sphere the geodesics are great circles. Many other surfaces share this property.
- Of all the solids having a given volume, the sphere is the one with the smallest surface area; of all solids having a given surface area, the sphere is the one having the greatest volume.
- It follows from isoperimetric inequality. These properties define the sphere uniquely and can be seen in soap bubbles: a soap bubble will enclose a fixed volume, and surface tension minimizes its surface area for that volume. A freely floating soap bubble therefore approximates a sphere (though such external forces as gravity will slightly distort the bubble's shape).
- The sphere has the smallest total mean curvature among all convex solids with a given surface area.
- The mean curvature is the average of the two principal curvatures, which is constant because the two principal curvatures are constant at all points of the sphere.
- The sphere has constant mean curvature.
- The sphere is the only imbedded surface that lacks boundary or singularities with constant positive mean curvature. Other such immersed surfaces as minimal surfaces have constant mean curvature.
- The sphere has constant positive Gaussian curvature.
- Gaussian curvature is the product of the two principal curvatures. It is an intrinsic property that can be determined by measuring length and angles and is independent of how the surface is embedded in space. Hence, bending a surface will not alter the Gaussian curvature, and other surfaces with constant positive Gaussian curvature can be obtained by cutting a small slit in the sphere and bending it. All these other surfaces would have boundaries, and the sphere is the only surface that lacks a boundary with constant, positive Gaussian curvature. The pseudosphere is an example of a surface with constant negative Gaussian curvature.
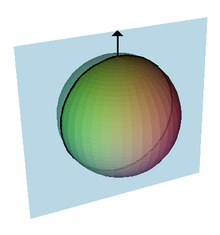
- The sphere is transformed into itself by a three-parameter family of rigid motions.
- Rotating around any axis a unit sphere at the origin will map the sphere onto itself. Any rotation about a line through the origin can be expressed as a combination of rotations around the three-coordinate axis (see Euler angles). Therefore, a three-parameter family of rotations exists such that each rotation transforms the sphere onto itself; this family is the rotation group SO(3). The plane is the only other surface with a three-parameter family of transformations (translations along the x– and y-axes and rotations around the origin). Circular cylinders are the only surfaces with two-parameter families of rigid motions and the surfaces of revolution and helicoids are the only surfaces with a one-parameter family.
Gallery[edit]
-

An image of one of the most accurate human-made spheres, as it refracts the image of Einstein in the background. This sphere was a fused quartz gyroscope for the Gravity Probe B experiment, and differs in shape from a perfect sphere by no more than 40 atoms (less than 10 nanometers) of thickness. It was announced on 1 July 2008 that Australian scientists had created even more nearly perfect spheres, accurate to 0.3 nanometers, as part of an international hunt to find a new global standard kilogram.[17]
-

Deck of playing cards illustrating engineering instruments, England, 1702. King of spades: Spheres
Regions[edit]
See also[edit]
- ^ σφαῖρα, Henry George Liddell, Robert Scott, A Greek-English Lexiconon Perseus
- ^ a b Albert 2016, p. 54
- ^ a b c Woods 1961, p. 266
- ^ Kreyszig (1972, p. 342)
- ^ Albert 2016, p. 60
- ^ Steinhaus 1969, p. 223
- ^ a b E.J. Borowski; J.M. Borwein. Collins Dictionary of Mathematics. pp. 141, 149. ISBN 978-0-00-434347-1.
- ^ Weisstein, Eric W. "Sphere". MathWorld.
- ^ Steinhaus 1969, p. 221
- ^ r is being considered as a variable in this computation
- ^ Albert 2016, p. 55
- ^ Albert 2016, p. 57
- ^ a b c d Woods 1961, p. 267
- ^ Albert 2016, p. 58
- ^ Weisstein, Eric W. "Spheric section". MathWorld.
- ^ Hilbert, David; Cohn-Vossen, Stephan (1952). Geometry and the Imagination (2nd ed.). Chelsea. ISBN 978-0-8284-1087-8.CS1 maint: Multiple names: authors list (link)
- ^ New Scientist | Technology | Roundest objects in the world created
References[edit]
- Albert, Abraham Adrian (2016) [1949]Solid Analytic GeometryDover, ISBN 978-0-486-81026-3
- Dunham, William (1997). The Mathematical Universe: An Alphabetical Journey Through the Great Proofs, Problems and Personalities. Wiley. New York. pp. 28,  , 226. Bibcode:1994muaa.book…..D. ISBN 978-0-471-17661-9.
- Kreyszig, Erwin (1972), Advanced Engineering Mathematics (3rd ed.), New York: Wiley, ISBN 978-0-471-50728-4
- Steinhaus, H. (1969), Mathematical Snapshots (Third American ed.), Oxford University Press
- Woods, Frederick S. (1961) [1922]Higher Geometry / An Introduction to Advanced Methods in Analytic GeometryDover
External links[edit]